
GumidekCZ
-
Posts
778 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by GumidekCZ
-
@FlankerKiller its not about if the Flares work in DCS and how they work (we all know about that stupid "random" game). Please take your time and read carefully what I have written above. Look at the weights.. now the Honet is using M206 like flares - lighter and lower aproximated lower efficiency than what it should have in DCS
-

DCS skins wrong Roughmet or very old SpecularMaps textures
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
Bump Hello ED? Mustang need some LOVE -
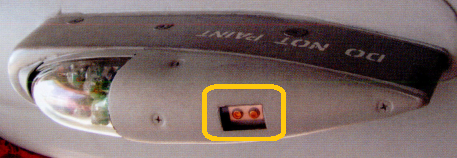
COVERT selector knob - basicaly selects, which lights the pilot wants to be switched from "naked eye visible" into INFRARED SPECTRUM (same spectrun as LITENING pod IR designator) - VISIBLE THROUGH NVG (Reafuel, lower wingtip lights, low formation light are not capable of IR emission). By switching between BRIGHT and DIM the pilots can set intensity of Covert lights IR emission. WHEN? ED, WHEN? we are waiting.... (:o)

-
Bump We still don't have any tool how to setup fighter to fighter Tacan for AI pilot in mission editor with proper +63 channel difference rule. I still have to set same Tacan CH to get Yardstick on my AI lead aircraft. We all know that it's wrong. We are patiently waiting for this feature in ME since A-10C was released.
-
May be you can help here, @NineLine PLEASE!!!
-
Thats because these two effects are STUPIDLY connected by single switch in DCS options. Wake turbulence set to off = Badly modelled Burble off
-
NOT IN SINGLE RW VIDEO of any airplane landing on carrier can be seen similar effect we STILL have now in DCS. THERE SHOULD BE NO, NOSE PITCHING UP near the end of the deck. I was hoping that yesterdays Hornet FM update would fix this idiotic behavior, but unfortunately not Im still patiently waiting, for fix. Then, and only then I will turn Turbulence effect in settings back to ON - so stupid than vortex behind big aircraft and burble effect behind ship is bound together and not divided into 2 separated setting switches.
-
YEAH, on of biggest mistake Western countries did in WWII ... together with selling plans by Brithish of their jet engine to Russia.
-
As title say: , I want to get rid of RU skins in any default ED missions RU skins ONLY for RUSSIA MADE PLANES PROPER SKINS BY NATION WHO MADE THE PLANE (not in licence)
-
Generaly Rockeye (MK 20) have fron fuze modelled for every module here in DCS, not just F-15E. IRL for MK 339 MOD 1 fuze, you can load two separate values of Arming Delay corresponding to the primary (AD1 - NOSE) or secondary (AD2 - NSTL) option timers - both timers set on ground. As you cycle inflight between NSTL and NOSE, the function times change to reflect this. TAIL select = DUD. Rockeye was fitted only with a primary and secondary timed delay fuze, which had to be both preset on the ground. Settings from 1.2 to 100 seconds. The fuze is preset at 1.2 seconds for primary delay, and the option delay is preset at 4.0 seconds. If you want the munition to function at a particular burst altitude (BA) to optimize coverage, you need only load that altitude in the SMS and the pull-up anticipation cue will function to let you know when you reach that (minimum) altitude. In this sense, the pull-up anticipation cue is not trying to satisfy a minimum fuze arm constraint, but is trying to indicate the optimum release point to ensure the correct function altitude. https://info.publicintelligence.net/USNavyRocketBombFuzeManual.pdf
-
As title say When RBL selected, after few seconds it will switch to BOL because of some instability. If you watch the HSI page, Harpoon symbology will flicker there. Track: Harpoon_RBL-unstable__BUG.trk
-
reported AGM-84D Harpoon TRUE heading flight path BUG
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
Because My June 2020 report still not solved and I found even more strange BUG behaviour, Im opening new report topic. Old one: Me flying MAG 270° (Caucasus map 276,2° TRUE), Harpoon set by UFC to fly MAG 270°, but instead of that, Harpoon fly its TRUE HDG 270° New find: Me flying MAG 260° (Caucasus map 266° TRUE), (Avionics set to MAG) Harpoon in BOL mode set by UFC to fly bearing 260° Than I switched avionics to TRUE and on HSI the line of Harpoon flightpath is correct ... 260° of TRUE, but after launch, the Harpoon will fly 254° TRUE. Thats radiculous! The missile should fly on type of bearing (MAG or TRUE) selected in avionics in time of bearing enterd in UFC. If MAG/TRUE changed in A/C HSI page after that, nothing should change - the bearing is already in memory of Harpoon INS. There is no command that should change it. track attached Harpoon_BOL_bearing_BUG.trk -
Mi-8 & Mi-24 main rotor Swash Plate wrong motion
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
Well, this document for Mi-8 describes in more detail everything I tried to explain above. Aerodynamics_Mi8.docx Особенностью работы НВ является инерционность его лопастей. Поэтому начало взмаха лопасти отстаёт от начала изменения угла установки на угол азимута приблизительно 90° −σк, где σк − характеристика регулятора взмаха. Это создаёт неудобство управления, так как не обеспечивается независимость каналов управления вертолетом. Конструкция системы продольно- поперечного управления вертолетом включает в себя так называемое опережение управления, назначение которого: -обеспечить полное соответствие наклона равнодействующей НВ Rн отклонению ручки циклического шага (РЦШ); -исключить взаимовлияние продольного и поперечного каналов управления, вызванное инерционностью лопастей. Опережение обеспечивается: смещением пальцев крепления тяг продольно-поперечного управления на 21° против вращения НВ (рис. 32), а также подбором характеристики регулятора взмаха (угла σ). TRANSLATED: A special feature of the main rotor operation is the inertia of its blades. Therefore, the beginning of blade sweep lags behind the beginning of attitude angle change by an azimuth angle of approximately 90° -σk, where σk is the characteristic of the sweep regulator. This creates inconvenience control, as it does not provide independence of helicopter control channels. The design of the system of longitudinal and transverse control of the helicopter includes the so-called control advance, the purpose of which: - provide a full correspondence of the slope of the equinoctial force of main rotor disc Rn to the deviation of the cyclic pitch stick; - exclude mutual influence of longitudinal and transverse control channels caused by blade inertia. The advance is provided by: shifting the longitudinal-transverse control linkage pins by 21° against main rotor rotation (Fig. 32), as well as by selecting the sweep regulator characteristic (angle σ). Fig. 32 Control advance mechanism
-
Mi-8 & Mi-24 main rotor Swash Plate wrong motion
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
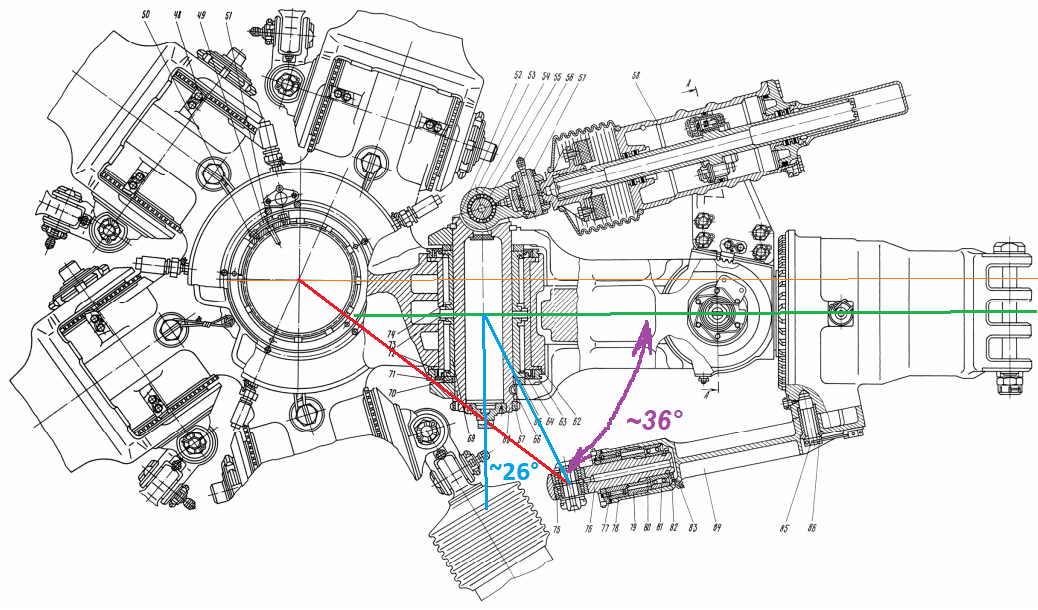
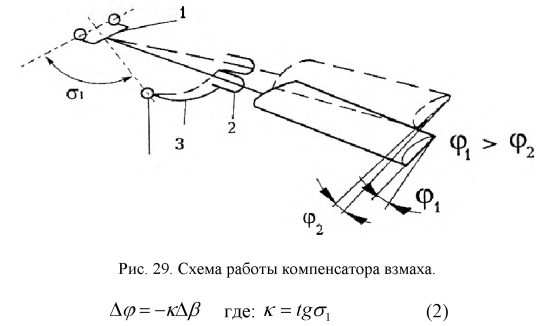
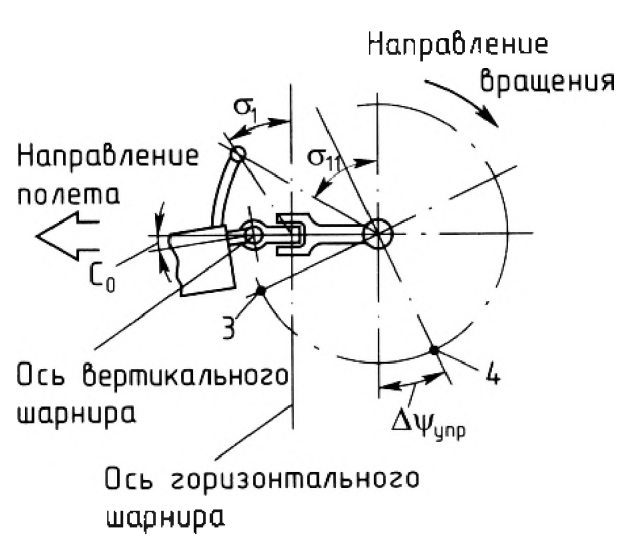
Drawing from which I measured the angle of pitch horns 36° (Tau) and falp stiffening angle 26° (Sigma) HOW THE ANGLE σ1 BETWEEN PITCH HORN AND HORIZONTAL (FLAPPING) HINDGE IS AFFECTING THE BLADE ANGLE ф : (ΔΨупр - is the offset angle of swash plate control = for Mi-8/24 it is the 21° ) Угол опережения изменения циклического шага лопасти определяется коэффициентом компенсатора взмаха лопасти (к), углом поводка лопасти σ11 и средним углом поворота (отставания) С0 лопасти относительно вертикального шарнира [6]: ΔΨупр =< σ11 - С0 - arctg(k) (1) Компенсатор взмаха в системе управления лопастями несущего винта (рис.29) - это особая кинематическая связь угла установки лопасти ф от угла взмаха лопасти β НВ при ее вращении в своей плоскости, обеспечивающая автоматическое уменьшение угла установки лопасти при взмахе вверх и увеличение его при опускании лопасти. Это нужно для регулирования и ограни чения взмаха лопасти в плоскости ее вращения. DeepL translation: The advance angle of the blade cyclic pitch change is determined by the blade sweep compensator coefficient (k), the blade leash angle σ11 and the average angle of rotation (lag) С0 of the blade relative to the vertical joint [6]: ΔΨупр =< σ11 - С0 - arctg(k) (1) The blade sweep compensator in the main rotor blade control system (Fig.29) is a special kinematic link between the blade setting angle ф and the blade sweep angle β HB during its rotation in its plane, which provides automatic reduction of the blade setting angle during upward sweep and its increase during blade descent. This is necessary to regulate and limit the blade sweep in the plane of rotation.
-
Mi-8 & Mi-24 main rotor Swash Plate wrong motion
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
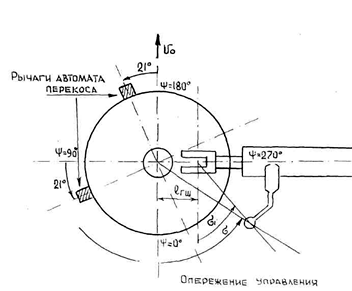
Better drawing, with Mi-8/24 offset angle of wash plate precceding control ΔΨупр = 21°.
-
Mi-8 & Mi-24 main rotor Swash Plate wrong motion
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
in attached doc on page 28 (this graphic not representing Mi-8 control) Рис. 8.18. Угол опережения автомата перекоса: Величина угла опережения автомата перекоса у разных вертолетов различна и находится в пределах 20-26° (у вертолета Ми-8 dАП =21°). При отклонении ручки продольно-поперечного управления, например, вперед наружное кольцо с тарелкой ввиду наличия угла опережения отклонится вперед и влево, а конус вращения несущего винта в результате циклического изменения установочного угла лопастей отклонится строго вперед. Translation: Fig. 8.18. The advance angle of the automatic skew control unit: The value of the advance angle of the automatic tilt control unit varies from helicopter to helicopter and is in the range of 20-26° (Mi-8 helicopter dAP =21°). When the longitudinal-transverse control handle is deflected, for example, forward, the outer ring with the plate, due to the presence of an advance angle, will deflect forward and to the left, and the cone of rotation of the main rotor will deflect strictly forward as a result of a cyclic change in the installation angle of the blades. Source: 8. Управление вертолетом Ми-8.doc
-
Mi-8 & Mi-24 main rotor Swash Plate wrong motion
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
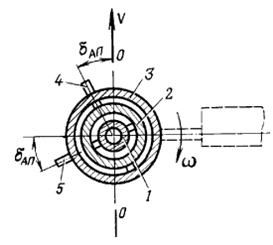
From the swash plate actuators position. Red - pitch control Blue - transversal (roll) control Both channels works independently on each other. Not like in DCS now, where if you push cyclic forward - both with actuate = wrong.
-
Mi-8 & Mi-24 main rotor Swash Plate wrong motion
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
I´ve got it! I have found explanation in Czech Technical University Bachelor thesis (Google translator or any other comes handy): https://core.ac.uk/download/pdf/30291859.pdf There is an angle between axis of (flapping) horizontal hindge and pitch horn (point A) - in picture angle designated as Delta According to Mi-8 aerodynamic manual 0,5 = tan(Delta) , so the Delta = 26,6° This angle decrease desired 90° angle. As measured by myself from drawing, it equals roughly to 36° So well known Mi-8 swash plate offset angle 21°(Delta) + Angle of pitch horns 36° (Tau) + above described lag angle 26,6° (Sigma) = 83° almost our desired 90° Note: my angular measure were dony only on my laptop screen with help of some tools and probably have some errors. SWASH PLATE BUG - fix axis of movement for lateral and longitudal tilt by 21° CCW. Keep rotor disc animation as it is now. Mi-24 Hind have identical main rotor hub and swash plate machinsm with same angles as described above. -
Mi-8 & Mi-24 main rotor Swash Plate wrong motion
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
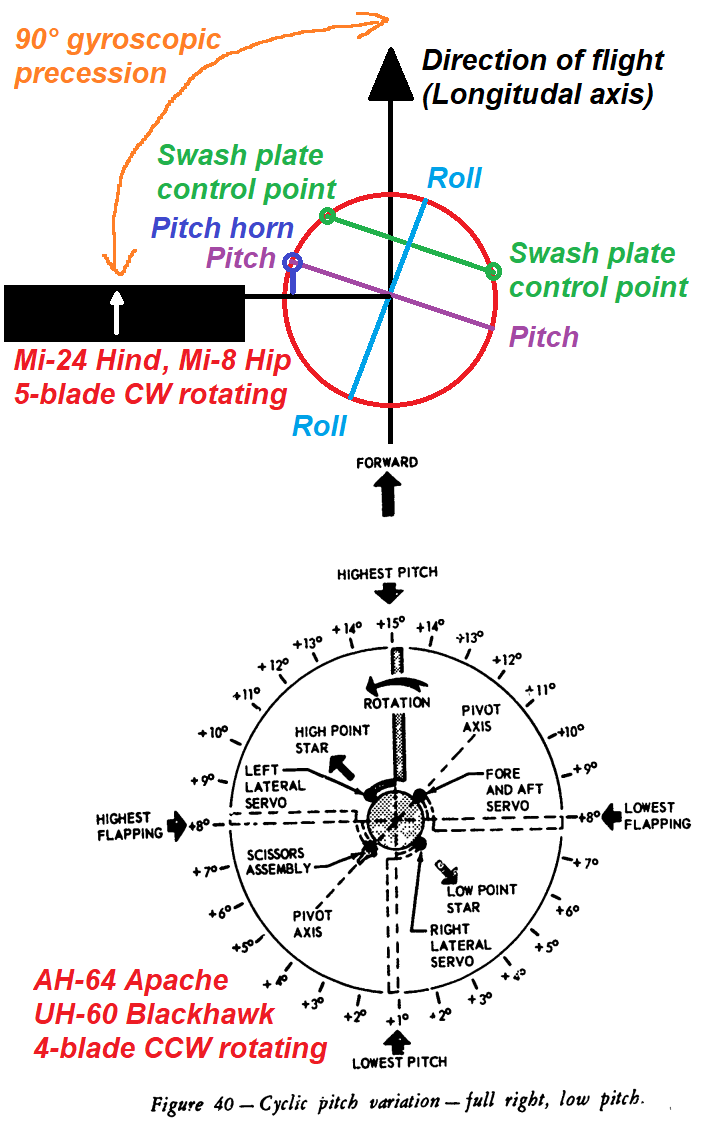
Swash plate never have 90 degree tilt offset because part of 90 degree angle will account to pitch horn angle offset. At Apache and Blackhawk it's exactly 45 degree swash plate +45 degree pitch horn. Gyroscopic momentum Always act in axis perpendicular to rotation and force applied. The swash plate have most common tilt offset of 180 divided by # of blades. Look at 3, 4 or 5 blades rotors and you will see that it's matches. -
@NineLine, please move this topic into Mi-8 Bug reports forum section. My mistake. Many thanks.
-
Simply, the swash plate is controlled so its tilted 90° precceding the tilt of rotating blade disc due to compensation of Gyroscopic precession effect. !!! EDIT: NOT EXACTLY TRUE - SOLUTION IS DESCRIBED BY ME IN THE TOPIC DOWN BELLOW !!! In DCS the movement of swash plate and rotor blade disc is in same plane - WRONG. SIKORSKY_HELICOPTER_FLIGHT_THEORY FOR PILOTS AND MECHANICS - ADA119096 - starting at page 27 Mi8_swash_plate_BUG.trk Mi-24_swash_plate_BUG.trk In the video bellow, when the swash plate tilted to the side, the blade disc in flight will be tilted forward or aft - controlling the PITCH.
-
reported CDU MISSION dial page shows created Markpoints
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
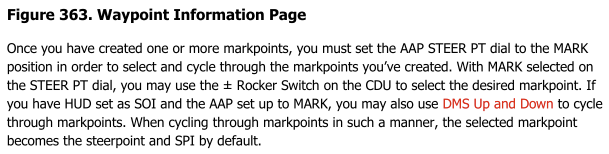
I think, that it is still a BUG, proper way how it should work can be now achieved only by selecting WP FSK - then STEERPOINT - then WP FSK again - and now WAYPOINT ... here the created mark points and waypoints can be cycled as they should from the start, not only by going through here described process. In my track, Im again trying cycle to saved waypoints, but without success, but then I use the above described process and voala, CDU WAYPOINT page working like it should be. A-10C_CDU_WP_page_BUG.trk -
reported CDU MISSION dial page shows created Markpoints
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
@Lord Vader I mentioned OTHER just as additional description of CDU setup. The bug report is about WAYPOINT page and inability to cycle through waypoints by +/- rocker (as described in both manuals) after Mark point is created. -
reported CDU MISSION dial page shows created Markpoints
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
@Lord Vader My problem is, that when STEER PT dial set to MISSION, than when markpoint created then the CDU screen somehow (bug) switch like if the STEER PT dial is set to MARK, without abylity se cycle there by +/- rocker between waypoints, only markpoints can be selected there. Now switching STEER PT dial between MISSION and MARK show the same and have same behaviour - acts as identical page. No waypoints shown. I've been going through the Baltics TEW 3.0 campaign for the past few months and I'm pretty sure this behavior wasn't there before the 2.9 update. I had been able to cycle through all waypoints AND markpoints. As RW and DCS manual says: - Not able to do so, after markpoint created.
-
reported CDU MISSION dial page shows created Markpoints
GumidekCZ posted a topic in Bugs and Problems
CDU STEEP PT dial set to MISSION and PAGE dial set to OTHER, Waypoints suddenly dissappear, only Markpoints there. It should appear only when STEER PT se to MARK as manual says. A-10C_CDU_Waypoint_page_BUG.trk