TomChaai
-
Posts
24 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by TomChaai
-
The coordinator ball is simply moved around by acceleration, if the ball is off center, it is really un-coordinated and it has nothing to do with Doppler side slip. The tail rotor pitch has to be adjusted dynamically with collective and airspeed changes, as torque changes with collective and the sideway lift generated by the vertical stabilizer increases with airspeed. In hover you may need the pedal halfway to the right, in mid-to-high speed forward flight, the pedals are close to the center. Another thing is that the autopilot yaw channel will try to hold heading in a turn if heading mode isn’t turned on, causing the aircraft to fly out of coordination. In the real thing the pilots step on the pedals to activate a switch to put yaw channel into inhibit/synchronized mode, in this way the autopilot will not attempt to hold heading and keeps the current tail rotor pitch, so coordinated turn can take place. In the game the pedal switch isn’t yet mapped to any controls, so you need to push the pedal a bit to put it to inhibit it. If it is Doppler angle slips away, but the ball is centered, then the flight is coordinated, it’s either side slip due to crosswind, or a bug when you turn on Airspeed to DISS switch, turn it off.
-
So the pedals don’t have force trim at least. Still it may be necessary to enable the trimmer option, as many of us would like to use a springed pedal that can also work with other aircraft. A FFB pedal is the final solution, but I don’t see anyone selling those on the market and even if there are, it will be very expensive.
-
Maybe smaller helos don’t have pedal force trim, but the Mi-8 definitely has it. I’ve seen people say Mi-24 don’t have it, but considering the sheer number of them produced, there can be many variations and options and some of them may have pedal force trim as well. What I agree is that there can be a better way of designing the game to work better with home sim input devices. One way of doing it is adding all possible key/axis mappings and let users map them to their equipment, so they can find a way to DIY equipment and make it work.
-
In the real aircraft, there are pedal microswitches that inhibits yaw autopilot whenever they are depressed (pilot feet on the pedals). However the game does not have this feature and instead uses pedal being pushed away from trimmed position as the switch being depressed. This causes confusion during a turn and caused the autopilot to try to keep original heading when turning, or causes oscillations when trying to yaw the aircraft during a hover. I know most sim pedals don't have FFB or any switches on them, however the ability to map the control should exist and there will be people figuring out ways implementing it in hardware.
- 1 reply
-
- 3
-

-
You don’t zero the pedals in flight anyway, the pedals always need trimming depending on the collective position and airspeed. What you actually need is the game mapping the pedal switches to a button or key, instead of treating pushing the pedal away from trimmed position as activating the pedal switches.
-
It can work, but don't be surprised if it crashes on you. Crashing as a passenger in a flight-sim game is "interesting". I remember seeing a thread here talking about Petrovich entering VRS in a hover.
-
If you can't align the gyros and AP can't turn on, there is no power. The main generators need rotor RPM to be within working range to work, then you have to turn on the 2 inverters and the 2 rectifiers to properly power on the electrical system.
-
The rudder trimmer option is in the game settings, only applicable to the specific module. It's probably you had it on for the Mi-8 but forgot to set it for Mi-24.
-
It is implemented. In cold weather you barely got enough battery power to perform ONE start, don't waste any time, turn on battery power, fuel pump then immediately start, it may work. Although it bypassed a lot of checklist items, so if you want to start it properly in cold weather, use ground power. Charge the battery for at least 30 minutes before even thinking about shutting it down, or you'll be stuck with a dead engine and a dead battery.
-
Is doppler nav impaired by low-altitude flying?
TomChaai replied to Nealius's topic in DCS: Mi-24P Hind
Maybe try turning off the switch on the left side panel of the cockpit, left of the 2 vertical gyros, there is an "airspeed to DISS" switch, this switch seem to mess up DISS real bad, the DISS even loses the proper heading and instead always assume the aircraft is moving north. -
I would hope they bring more of the features and modelling fixes brought forward in Mi-24 to Mi-8, however I understand this is unlikely to happen at least anytime soon. The Mi-8 product itself is pretty late in its lifecycle, probably not worth the effort to put resources into its development. It's developed by another studio, there certainly will be handover/copyright issues across different studios. Still, it won't hurt hoping this would happen.
-
What does the letters stand for in the upper right control indictor?
TomChaai replied to sobe's topic in DCS: Mi-24P Hind
H is actually the Russian N, направление, heading. (It isn't the exact definition of heading in Russian aviation terminology, but this is close enough) K is крен, roll T is тангаж, pitch B is Russian V, высота, altitude -
On a Mi-8. holding the button is quite similar to tapping the button frequently, it constantly or frequently zeroes out the AP pitch/roll stick position signals, but unlike Ka-50, it does not update SAS attitude reference. The holding/tapping technique is emphasized because it contrasts with western helicopters usage of the force trim, where you use the stick often, but only sets force trim every once a while.
-
How to engage the autopilot - Auto Hover, Route, speed, altitude ?
TomChaai replied to pappachuck's topic in DCS: Mi-24P Hind
Check your doppler speedometer on the upper left, if the helicopter pitches up too much, it will trip out because the doppler radar cannot capture ground signals and AP hover mode will trip off as well. so make the helicopter almost perfect standstill before trying the AP hover mode. -
How to engage the autopilot - Auto Hover, Route, speed, altitude ?
TomChaai replied to pappachuck's topic in DCS: Mi-24P Hind
For hover, bring the helicopter into hover, make sure the doppler speedometer is working (the one on the left), then engage hover. It may pitch up to kill residual forward speed, if it pitches up too much, the doppler may lose track of the ground and hover mode will trip off, so avoid any forward speed when clicking it. -
I think we discussed about this a while back, it's either a translation error in the manual I read, or the manual was referring to an uncommon production option. The autopilot/SAS on the Mi-24 is quite similar to the one found on Mi-8, actually what I experienced in game was more like the Mi-8 re-implemented properly according to the Mi-8/Mi-17 manual in better detail. For example pressing the force trim button zeroes out the autopilot pitch/roll inputs. I think the new Mi-24 is better implemented, but would not work too well with non-FFB sticks due to the autopilot cutout, it's more tricky to press/release the trim button at the right time and avoid disrupting the autopilot, but I imagine it would work quite well with FFB sticks. The way Mi helicopters are meant to be maneuvered is to hold down the trimmer button whenever you move the cyclic, this ques the autopilot to temporarily give you more control. Coming back to the yaw SAS, the azimuth/heading/track select feature of the autopilot is an improvement over regular Mi-8s, you can basically fly around with one knob.
-
Not sure about Mi-24, but the Mi-8 actually had switched in the pedals. With feet on the pedals, the yaw channel heading hold and the pedal force trim is inhibited so you can freely use pedals for control inputs. Stabilize the aircraft with pedals and lift the feet, the heading hold will hold new heading. The game does not simulate "feet-on" switches and instead takes any pedal axis input as "feet-on", this creates a fight between your input and the autopilot and a jolt when you remove pedal input or use trimmer to reset pedal position. Hope they implement a button input as switch in the future.
-
Great I was waiting for this. Have been stuck in the air for 2 days without a bathroom break. Jokes aside, keep up the good work, I'm looking forward to the detailed system descriptions to figure out the autopilot. Most systems seem to be very similar to the Mi-8, but still somewhat different.
-
What does HKTB in screen control mean?
TomChaai replied to jozeffff's topic in DCS: Mi-8MTV2 Magnificent Eight
Thanks AlphaOneSix. It's always good to have someone with real-world experience on the subject matter to input. With so many production changes and customer options available for the Mi-8 family, probably not many people have a whole picture or consistent opinion about it. Probably the game developers themselves can't agree on how to implement some of those differences. I did see this manual mention that when the pedals are used to override the yaw autopilot, pedal force trim is temporarily disengaged. Maybe it is just another obscure production variant? It's page 2-46 of this manual. TSMO Dash 10 (TM 1-1.. (yumpu.com) -
Just saw this. Ми-8 серый 96742 запуск и взлёт Кубинка 2020 - YouTube Pretty much confirmed the in-game model is distorted, the default AoA is too much negative. Hope they get around to fix it, seems they got too much on their hands at the moment.
-
What does HKTB in screen control mean?
TomChaai replied to jozeffff's topic in DCS: Mi-8MTV2 Magnificent Eight
For autopilot altitude hold, if it starts to go phugoid, you are flying too fast. adjust your baseline pitch attitude to stabilize in slower airspeeds. The real Mi-8 autopilot has a speed stabilization mode that are turned on together with altitude hold, it pitches up when the airspeed increases and vice versa, it does not seem to have been modelled in the sim. Combined with the autopilot's control response and the helicopter's high speed stability characteristics, it may end up going phugoid or even loop. If the autopilot "B" channel starts skipping immediately when engaged, it is a bug, disconnect and immediately reconnect it. The pedal switches are not properly simulated in game. In real aircraft, putting the feet's weight on triggers the yaw channel into override mode, the heading hold and the pedal force trim disconnects, allowing the pilots to maneuver in to new heading and stabilize it, when the aircraft is in new heading and pedals are manually positioned to stabilize it, the pilot lift the feet off, so heading hold and pedal force trim re-engages, holding the aircraft in new heading. The game does not simulate "feet-on, feet-off" properly and instead takes "feet push" as "feet on", so when you push the pedals to turn the aircraft and are about to stabilize it in new heading, the pedals may move across neutral point, which updates the autopilot yaw channel with wrong heading, and because the yaw rate is not yet stabilized, the yaw channel swings heavily to try to stabilize the aircraft, causing great problems during hover/power change. There is a bug that randomly prevents the yaw channel heading hold to be updated properly with pedal movement, further complicating the matter. You can end up dancing all over the place with these factors combined. -
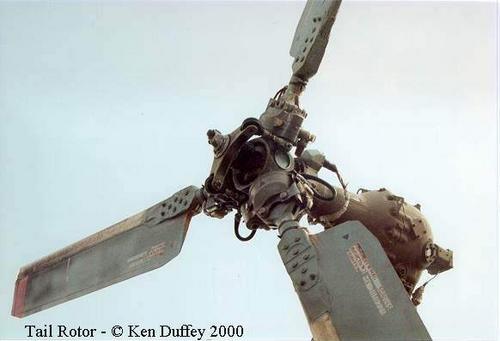
I've checked in the game again. If you apply full left pedal, it is huge negative, if full right pedal, it is flat. (There is a bug/trick to inspect flight controls even after the rotors stopped, just fully disconnect electricity before the rotor stops, the hydraulics will keep working) Compare to screenshots where it is already slightly positive in rest position, I'd say you are right, the modelling geometry or part animation is off. Couldn't tell which though. This is another angle of the real thing, thanks to credited author.

- 13 replies
-
- 1
-
-
- investigating
- 3d
- (and 2 more)
-
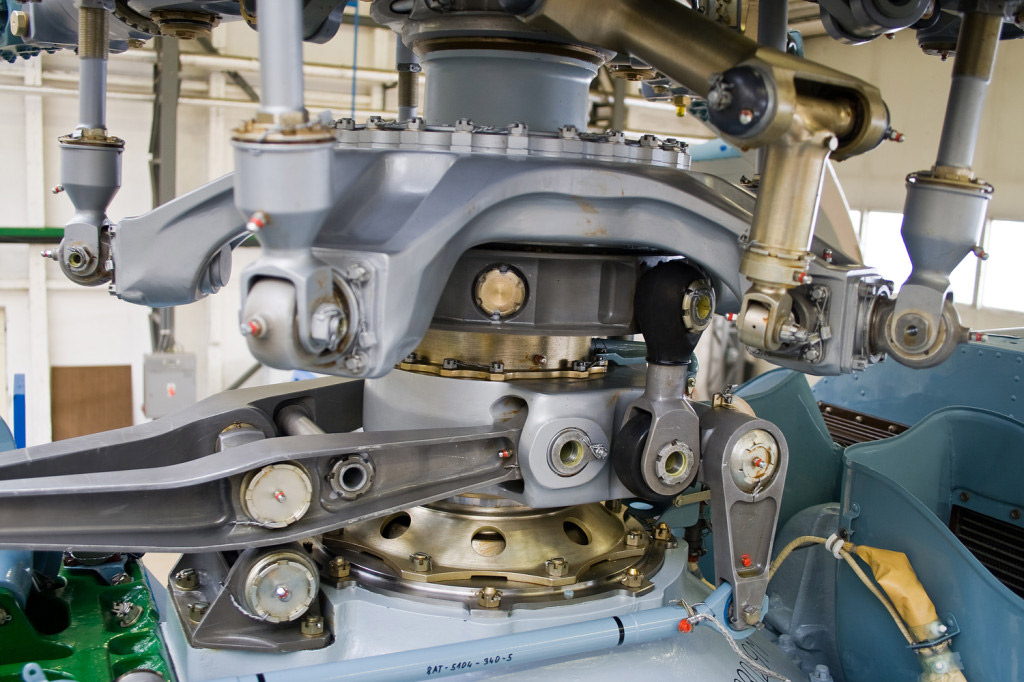
Not sure if someone already posted this, but the right side linkages of the rotor swashplates are apparently wrongly modelled. Here is a picture of the unit, randomly googled so I don't own it, just used here to prove a point. This is from the starboard side looking to port side. The blue linkage in the bottom with "340-s" written on it controls lateral tilt of the swashplate. Normally when you apply left cyclic, the link is pulled, the rocker turns toward the back, pushing the pushrod on the right side of the lower swashplate up, therefore the whole swashplate tilts left. However in the game, when you apply left cyclic, the linkage pushes, the rocker and the pushrod will move in opposite direction, apart from each other. Also the pushrod bearings seem to have been modelled incorrectly according to the picture.
-
The direction of rotation makes sense, the tail rotor control animation makes sense. When you push the right pedal, the negative AoA of the tail rotor blades reduces, so it is in the direction of creating more force pulling to the left. However I'm not so sure about the default blade AoA is such huge a negative, it looks like it would be creating forces pushing to the right most of the time. Could it be due to the airfoil, the blades create too much pulling force, so they actually have to set it in negative AoA in neutral? Anyway a photo of the mechanism in real life would help.