Маэстро
-
Posts
1506 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by Маэстро
-
Thank you, will be fixed
- 1 reply
-
- 3
-

-

-
 Thanks, we will see what we can do
Thanks, we will see what we can do -
Coming soon
-
Thanks, we will look into this
-
Could you please attach a track?
-
1. There is no contradiction with these books. I already told that it is zero because there are no doppler filters placed to part of spectra which contain sidelobe clutter and opening targets. That's how it usually made IRL. There is no rational reason to place filters in sidelobe clutter area if radar has MPRF and INTL mode. 2. RGHPRF does have this problem, it's just less severe. MPRF still better for detection of opening targets. 3. The only practical usage of HPRF against opening targets is MC STT(PDI illumination for Sparrow). But that's different mode and has nothing to do with RWS or VS.
-
It's not a bug. In HPRF Pd does not depend on closure rate, but it does depend on target radial velocity (projection of target vlocity on LOS). Yes, that may look like it based just on target aspect, but it's not in fact. And yes you cannot detect any cold target in HPRF RWS because it's not designed for this. In this mode Doppler filter bank is always placed in clear spectra region, to the right of side lobe clutter + some margin(see speed gate option), so radar can see only closing targets.
-
Hi! Could you please attach a track? This bug definitely has been fixed, but it seems something is broken again.
-
already implemented When will the speed gate for the APG-73 be implemented?
Маэстро replied to DSplayer's topic in DCS: F/A-18C
Hmm, looks like a bug. -
We will investigate. Looks like R-13 drag issue.
-
It was added to the game, but it was not added to the payload in 2.9. Sorry for that. Will be available soon.
-
You are welcome guys. Yes, P3 is also added. There are 3 "p" versions now: P3 and P5 with reduced smoke motor, and original P with smoky one.
-
In 2.9 MiG-21 original missiles were replaced with ours, so many of problems you have described should be fixed. Rb24/J and Rb74 for AJS-37 were also replaced.
-
Unfortunately, there were some source code conflicts which prevent including aim-9 changes into public version. All changes included into forthcoming 2.9 now. Sorry for long release.
-
Maybe I'm wrong about F-15, but i know some red radars that work exactly as I have described - alternate 2-3 PRFs until detection occur and then froze PRF for range measurement. Anyway it would be interesting to make some research on performance of both methods. But that was the point. To lock average power in some bounds using transmitter input power. Energy conservation law is always there. System(GTWT) can not give more energy than it receive => average output power can not exceed consumed power. Otherwise it's a violation of the law of energy conservation. I understand your considerations. But problem there is relatively high(to similar systems) average power. Taking into account low efficiency of TWTs we should expect about 20kW of input power in that case, most part of which will turn into heat(which in turn must be removed by powerful cooling system). Does not look typical. Thank you! I will study your recommendations. We also have some thoughts on resolution effects implementation, but it will require time - more realistic tracking loops for STT and TWS, and other things are needed in that case.
-
Will take a look, thanks.
-
Please note that data in the whitepaper is for original APG-63 from early 70s, updated APG-63v(1) may have range grater than APG-73. In look-down situations main limitation is receiver dynamic range which depends on the number of ADC amplitude bits. It's already in our model. However, there is no big impact on detection range of medium size targets.
-
Yes, I have already read your paper, thanks. But Pavg seems to high to me. From that I know, typical fighter radar has Pavg about 1-2kw. Much of that is due to relatively low TWT efficiency(only 25-30%). For example from Introduction To Airborne Radar book we know that APG-73 transmitter input power is 4.5kw. Suppose electronics consume 500w and 4kw consumes TWT, than average output transmitter power is 4kw * 0.3 = 1.2kw. It would be nice to have some info on APG-63 power consumption or alternative source to double-check transmitter peak power. No, I know what CPI is. BTW, assuming Tint = ToT/3 when 3 stage FMR used is not quite correct. We also should account for number of PRFs used to minimize eclipsing. If 2 PRFs are used, then we need 4 CPIs to guarantee successful ranging. If target eclipsed during first CPI it will be detected on second and 2 remaining CPIs will be used for ranging. If we have 3 PRFs then at least 5 CPIs per ToT are needed. Unfortunately, I can not make our model public, but we can continue discussion to make things clear, and maybe combine our approaches.
-
Hi! First of all thanks for your feedback and SNR figures. I should clarify things a bit because phrase about azimuth/bar settings caused a misleading. This does not mean we are going to use cumulative detection probability in our radar model. This only means that we have plans to introdice realstic detection probabilitiy calculations based on SNR. Indeed, in general case azimuth/bar setting may affect detection range only because of more frequent sweeps. BTW Today will be published a new paper about our approach to APG-65/73 detection range estimation. It will be interesting to hear your thoughts on that. Perhaps this paper is a bit sketchy, but we still gathering information and refining our estimation.
-
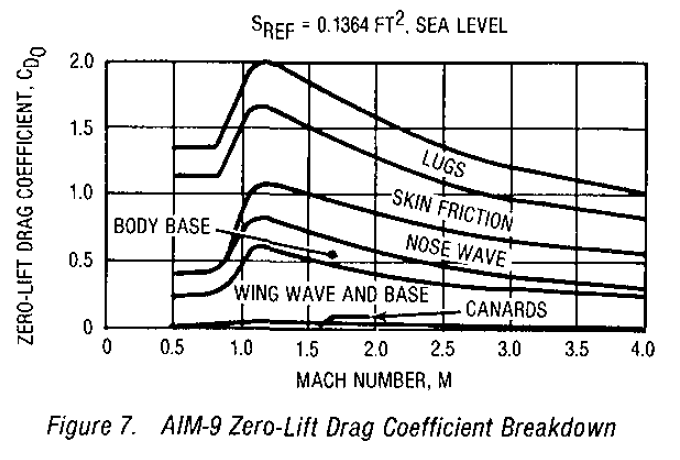
Hi, don't sure there was such a diagram for 9D, but I have one for 9L/M

-
Maybe June, sorry can't be more precise. This major feature planned, but its awaiting for "clouds API" completion (a part of MT Graphics system). Again no exact dates.
-
Hello @MysteriousHonza, Thank you for your interest in DCS weapons. Most of these changes were already made some time ago and just awaitng to be released. AIM-9 family missiles will have correct max g-load and motors. CCM was also readjsuted, P and P3 CCM was reduced a bit, P5 ccm_k is equal to 9L ccm_k now (not 9M bc it's a quite more advanced missile).
-
Hi @Mad_Shell, Some of parameters such as X_back and sigma are legacy ones and have no effect on newer missile API. We'll think of it. But we should account for RL limitations if there are any. Please, see answer in coresspnding topic. Unfortunately, it's barely possible to estimate such a short burn time by videos. We also should retain acceleration within reasonable limits. As far as we know booster gives missile about 40m/s of initial velocity, so 0.2s -> 20g axilal acceleration, 0.05s -> 80g. That's a qute hard kick. Anyway this no any difference from gaming point of view between these values. Our drag values are correct ones, because they based on our own CFD research. That was one of the reasons why we decided to make our mistral version. We aware of this problem. Booster produces no sound. Will fix. Is there any solid proofs? Missile itself looks absolutely symmetrical and has two pairs of fins, so looks like there is no any reasons why it should spin.
-
Hi! There is no massive issue. There was a problem with reading ccm_k0 value form lua, that is already fixed internally. Mistral, stinger, igla, mim-72 is the only affected missiles. All they have defalut value of ccm_k0 = 0.5 at the moment(in OB and release version).
-
already reported AIM-120 Midcource Guidance Desync
Маэстро replied to dundun92's topic in Weapon Bugs
That was particular amraam issue. R-77 and R-27 use different missile API and can not be affected by this desync.