walmis
-
Posts
299 -
Joined
-
Last visited
-
Days Won
13





-

Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
https://discord.gg/XEXZmQHk3T this one should be unlimited -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Hey, until the website is done you can join the VPforce discord: https://discord.gg/XEXZmQHk3T There's a #faq channel with the most relevant information. -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Hi, I can jump in here So a couple of advantages of the top of my head: Rhino is plug-and-play DirectInput, so no additional software is required for it to run on FFB supported games. Rhino has bigger motors and much higher gear reduction - much more torque Bigger motors with active cooling don't overheat in normal use cases. Price Here's a video showing versatility of the system in action, showing a mechanical implementation of the Rhino DIY motor kit for a custom cyclic from one of my first clients -
We need to talk about Force Feedback and the Mossie...
walmis replied to DD_Fenrir's topic in Bugs and Problems
Hey guys, I've noticed some FFB related discussions, so I figured I'll jump in a bit since I'm working in the field for quite a while So I have been developing a a plug and play FFB system for the past few years, and recently started shipping first motor kits and first 'RHINO' FFB bases. The FFB motor kit is aimed for cockpit builders and hobby mechanics who want to build their own stick/cyclic, It solves the complicated problem of system control, motor power delivery, USB communication, etc. I very much hope more people will (re)discover FFB and we, FFB users, will receive more love from ED. Feel free to join my discord server: https://discord.gg/XEXZmQHk3T to keep in the loop about the latest developments. My YouTube channel with some FFB demos: https://www.youtube.com/user/walmis -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Good stuff, just don't forget one important piece for such high powered equipment -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Hey guys, some quick test flights: I've also made a discord server, so most of the stuff is happening there: https://discord.gg/Y7YmFGHbee -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
That type of gimbal works perfectly fine for the forces applied in this application. Of course if one wants 20kgf, you might skip the Rhino and build a DYI machine. But as a compact Brunner alternative it works perfectly fine. Disclaimer: while the gimbal might look similar to yours, I have it redesigned from scratch.
-
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
The servo drive can be driven up to 30-35A (the limitation is the current-sensing feedback path gets saturated with 1mOhm shunts, MOSFETS are rated up to 175A). But according to the motor datasheet, peak current is within the servo driver's current limitation. I'll need to test the real world performance. Maybe it's possible to push it more. The 57BLF03 does indeed have a D shaft: Can you elaborate more on "shaft-winding"? sounds interesting
-
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
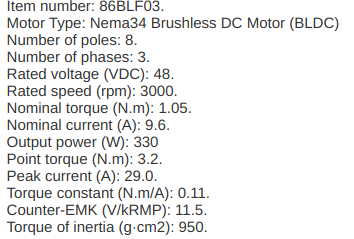
Yes, definitely! Got my hands on a few samples of 86BLF03 motors. Installed the servo drive. Works a treat. Happy to say I will be able to supply them. Demo of the big boy in action with the 57BLF03 for scale: https://gfycat.com/unrulyentirebilby -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Hey guys, I've uploaded an album featuring RHINO FFB Base. https://imgur.com/gallery/Do6Jr0T -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
I have this planned. It will be easy to disable X or Y axis and adjusting the feedback parameters as desired for the single axis! -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Been researching how to improve the implementation of the Friction effect. Think I found a solution. This will be a solution to implement a Helo Collective for example without messing with complex mechanics. -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
The motors are rated 3000rpm at 24V. I have used these with my first base, which has 1:24 ratio pulleys. Works just fine -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Thanks! Although I do lots of reading, listening and writing in English, my English tongue definitely needs some practice Yes, they are wired in parallel and the speed is controllable by hardware by modulating the voltage. ATM they are ON-OFF controlled with hysteresis - they start at >=50degC and shut off at <=45degC. If a need arises to change these parameters (perhaps like fan profiles in modern motherboards), I'll happily implement this in the future updates. Yeah good point about the 57BLF04, the two reasons were: I was not able to find a reliable source and they are too big for my 'Rhino' FFB base. So I invested into the 57BLF03 ones. There's actually another heavy-duty alternative: the 86BLF03. 2.3kg beasts, 1 Nm continuous and 5 Nm peak torque. Quite tempted to try them, but I'll need to spin another modification of the motor PCBs to accommodate those. -
Honey, I developed FFB joystick (DIY)
walmis replied to propeler's topic in PC Hardware and Related Software
Hey guys, first video is online: