Waxi
-
Posts
151 -
Joined
-
Last visited
-
A fix for the issue with DCS not starting when Ultraleap hand tracking is enabled is provided here: The thread also touches on how to configure and use the Pimax Crystal accessory hand tracking module with DCS. It seems that there are two options: Use the Ultraleap hand tracking built into DCS. Use the Ultraleap hand tracking of the Pimax software which emulates VR hand controllers in DCS and reportedly provides more configuration options than #1. I do not own the hand tracking module (yet) and just summarized what has been discussed in the thread linked above.
-
I had the same issue. Uninstalling OpenXR Tools for Windows Mixed Reality and OpenXR Toolkit solved the issue for me.
-
Same issue here using RTX 4090 and Reverb G2. From the distance, units look like big dark cubes. I suppose that this issue might potentially be related to the new LOD (Level of Detail) feature that has been introduced in 2.9. Here is the corresponding item from the changelog: I have not changed this setting after updating to 2.9. Thus, I cannot tell if changing the slider value has an effect.
-
To achieve the 12° axis rotation, you could mount the base 12° rotated and then twist the grip so that it is straight before tightening the big nut fixing it to the base. I am also using asymmetric forces based on the F-16 flight manual someone posted in this forum: Here is my configuration and the thought process behind it: Moveable area impact: 6% The Orion 2 non-MFSSB has a maximum deflection of 17°. The Orion 2 MFSSB limits the maximum deflection to 1°. This means that the movable area of the MFSSB corresponds to about 6% = 1°/17° * 100% of the maximum deflection of a normal base. Thus, I set the moveable area impact to 6%. Maximum force settings for each axis: When set to 100%, the MFSSB Orion 2 base requires a maximum force of 6 kg. Scaling the reported maximum forces required on the real F-16 stick down to the maximum forces of the Orion 2 MFSSB results in the following settings. After some testing I decided to reduce the maximum force a bit to the values in parenthesis: Pitch up: 100% (90%) Pitch down: 64% (58%) Roll left/right: 68% (58%)

-
Great hint. Thank you for sharing. Off-topic, but I am to curious to hold back this question: Why did you change from the Aero to the Crystal, i.e., why were you unhappy with the Aero and are you satisfied with the Crystal?
-
The F16 throttle rails seem to have some wiggle room. They did not perfectly align with the mounting holes at first. I then loosened the screws holding the rails and moved the rails so that M4 screws fited through the mounting holes into the rail slots. Placing the M4 nuts into the rails was a game of patience. I finally glued them to a toothpick using sticky tape so that I could move them back and forth until the screws got grip in the nuts. For switching from the F16 throttle to the F18, F15 or BS collective, I leave the lower rails on the throttle and just remove the upper part.
-
This is the version of LeapC.dll that comes with the latest Ultraleap Gemini software and that I am now using with DCS:
-
It seems that I have found a solution. I have an Ultraleap Leap Motion Controller and the corresponding Ultraleap Gemini hand tracking software installed. This software includes an OpenXR plugin. DCS also supports the Leap Motion Controller and includes the corresponding library but seems to come with an outdated and/or conflicting version. So here is what worked for me: Copy this file: C:\Program Files\Ultraleap\OpenXR\LeapC.dll To the following folders and overwrite the existing LeapC.dll files there: C:\Program Files\Eagle Dynamics\DCS World OpenBeta\bin C:\Program Files\Eagle Dynamics\DCS World OpenBeta\bin-mt After this, I could successfully launch DCS in OpenXR VR mode. Thank you for the hint. I will check it out.
-
I have a similar issue: DCS does not launch in OpenXR VR mode. More details here:
-
Issue description When attempting to start DCS Open Beta 2.8.6.41066 with the --force_enable_VR --force_OpenXR command line options of the DCS.exe, DCS starts in 2D mode and not in VR mode. This happens for both the single threaded and multithreaded versions of DCS. Furthermore, the issue occurs no matter if Windows Mixed Reality or Steam VR are used as OpenXR runtime. Skimming through the dcs.log file (see attachment), I noticed the following error related to OpenXR: 2023-06-13 09:39:09.356 ERROR VISUALIZER (Main): OpenXR exception: XrResult failure [XR_ERROR_FILE_ACCESS_ERROR] Origin: xrCreateInstance(&createInfo, &instance) Source: Projects\Visualizer\Source\OpenXR\openxr_program.cpp:299 2023-06-13 09:39:09.357 INFO VISUALIZER (Main): LAUNCH IN VR ed_FakeVR: ed_FakeVR 2023-06-13 09:39:09.358 INFO VISUALIZER (Main): render thread initialization... It seems that DCS cannot access the OpenXR library file in the file system. Other OpenXR applications like the demo included with OpenXR Tools for Windows Mixed Reality work fine. When not using the --force_OpenXR command line option with the single threaded version of DCS.exe, DCS starts in VR. The system runs a fresh, clean and fully updated installation of Windows 11 Pro and the latest drivers for the installed NVIDIA RTX 3080 Ti with a HP Reverb G2 WMR headset. An Ultraleap Leap Motion Controller and the corresponding Ultraleap Gemini hand tracking software installed. Solution that worked for me: The Ultraleap Gemini hand tracking software includes an OpenXR plugin. DCS also supports the Ultraleap Leap Motion Controller and includes the corresponding library but seems to come with an outdated and/or conflicting version. So, this is how I could fix the issue: Copy this file: C:\Program Files\Ultraleap\OpenXR\LeapC.dll To the following folders and overwrite the existing LeapC.dll files there: C:\Program Files\Eagle Dynamics\DCS World OpenBeta\bin C:\Program Files\Eagle Dynamics\DCS World OpenBeta\bin-mt After this, I could successfully launch DCS in OpenXR VR mode. dcs.log
-
Same here. When I check the serial number shown for the Normandy 2.0 map in the shop in my user profile, it says that it is the serial number for the old Normandy 1944 map.
-
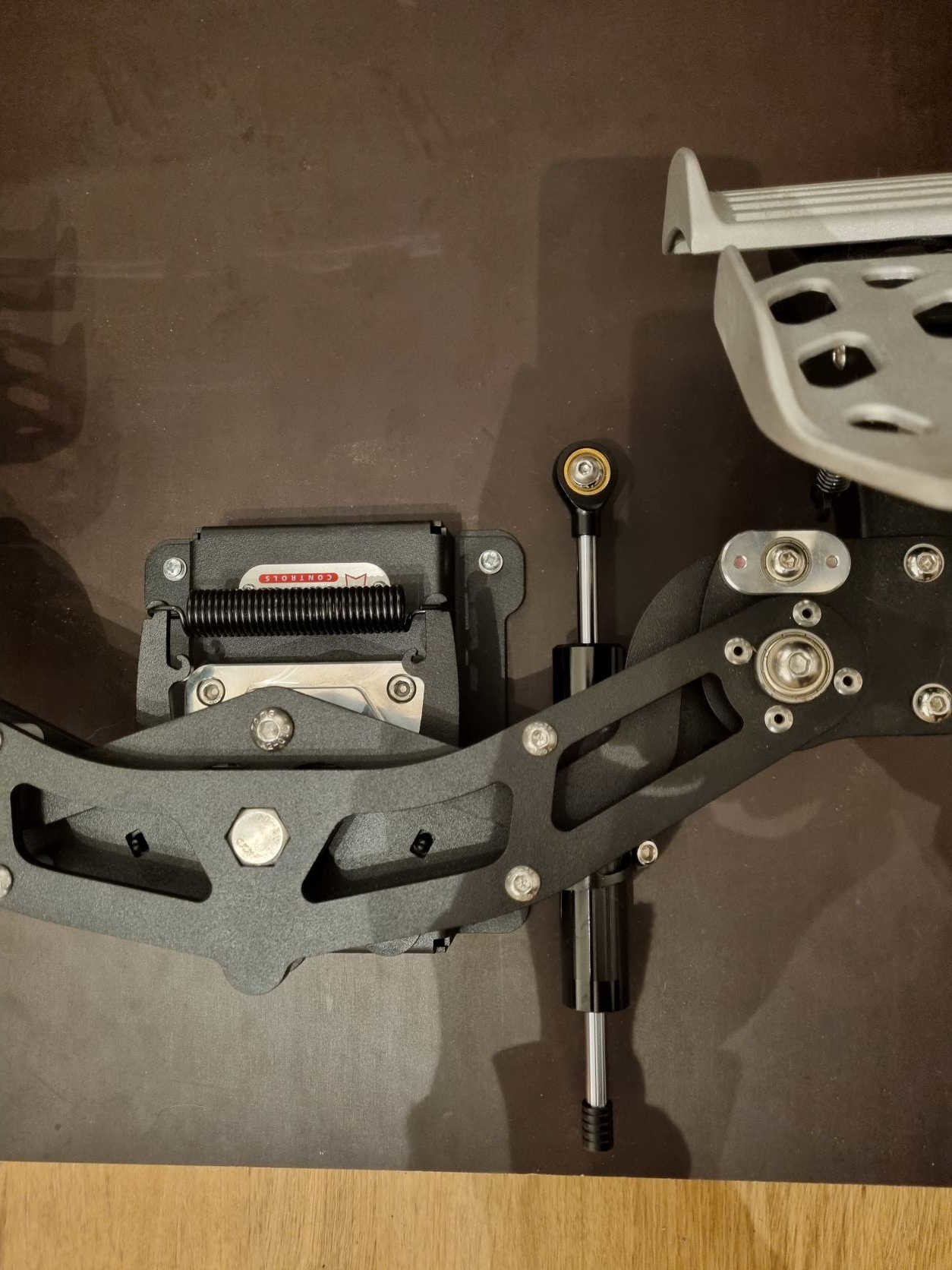
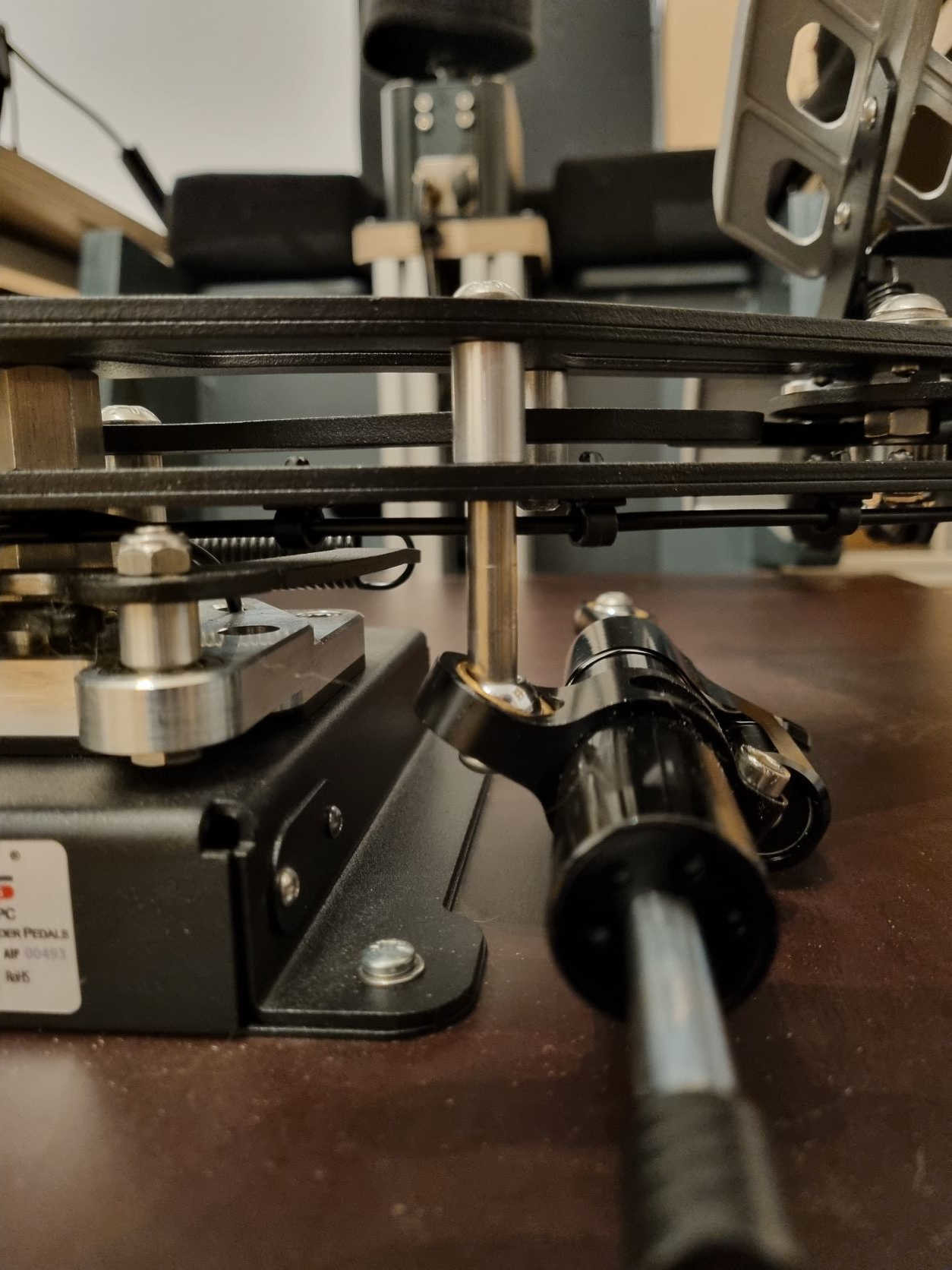
Inspired by a video on YouTube, I added a motorcycle steering dampener to my floor-mounted Virpil Rudder Pedals to get rid of the oscillation of the pedals generated by the springs. The mod is completely reversible and should not damage the pedal construction. These are the parts needed: Motorcycle steering dampener (1x) M6 x 50mm rounded head hex screws (2x) 8.0mm x 6.4mm x 10mm (outer diameter x inner diameter x length) spacer tube (7x) M6 washer (2x) - only one required, the second one is just cosmetical M6 x 15mm screwed insert (1x)
-
VRK - a virtual reality enabled kneeboard with touch and ink support
Waxi replied to AMVI_Rider's topic in DCS Modding
This tool and the idea behind it are awesome and elegantly solve the notetaking challenge when flying in VR. Moreover, it is giving new life to my decade-old Wacom Bamboo drawing tablet which I was already about to trash. Great job! -
I would also highly appreciate an option to decouple head movement from mouse cursor movement in VR.
-
It could be that your light source is flickering, which may interfere with the tracking. Light sources often flicker at the frequency of the power grid (i.e., at 50 or 60 Hz, depending on where you are). This is too fast for most humans to notice, but for the tracking cameras it could be an issue. I think the Oculus software has an option to address this, but I am not aware of a similar feature for WMR headsets. Maybe using another light source (e.g., a portable lamp with a different light source than your room light) may improve or solve it...