PilotMi8
-
Posts
4380 -
Joined
-
Last visited
-
Days Won
4








About PilotMi8
- Birthday January 24
-
если по Вашему для полета модели вертолета DCS энергия берется из воздуха, то надо это как-то более весомо доказывать. Расхождение в 0.73% для продолжительности полета - это "слёзы". Предлагаю: сделайте тест на земле в активной паузе для различных режимов. Тогда влияние обтеканий, потерь и тп. от аэродинамики вертолета будет минимальным. Если окажется на земле, что нарушается закон сохранения энергии, тогда будем глубже смотреть. НВ и двигатели тесно связаны, и никак нельзя повторить полет полностью и идентично, в плане изолированности исследования расхода топлива. НВ меняет свой кпд от оборотов и шага НВ (равно и двигатель меняет свой кпд от этого же самого))), потому, если выполнять полет в различных условиях, то результаты (имхо) будут "плавающими". Т.е. вертолет в двух почти одинаковых полетах (при одинаковых весах, скоростях по всем осям, идентичном времени пролета участка маршрута и прочих равных условиях, кроме оборотов НВ и его шага) будет иметь сильно разный расход топлива, и закон сохранения энергии будет в порядке, т..е 100% соблюден. Отличий в расходе топлива будет больше, чем Вы нашли в Вашем эксперименте. Да, и как по Вашему полет хвостом вперед должен проходить для вертолета 64? Что-то должно случится? Если должно, то опишите и, если есть подтверждение каким-то необычным явлениям, то дайте на них ссылку, будем благодарны.
-
ну что за крайности... всего знать невозможно, многие летчики не знают многое, связанное с аэродинамикой, и тем более с силовой установкой. Модель двигателя в 64м сделана довольно точно, со всеми обратными связями. Т.е. замедление НВ непременно сказывается и на компрессоре, и на процессе горения, и соответственно на температуре и последующей энергией на свободной турбине. Законы управления качественно соблюдены ("качественно" - это когда проявление "в ту сторону") - это точно, вот количественно, на предельных режимах, когда наклон кривых уже большой, там могут быть расхождения немного, чем на штатных режимах. А полеты на модели они все "прощают" В реальности, с такими температурными перегрузками ,как летают пользователи DCS, ресурсы любого двигателя будут стремиться к нулю)) Это я к тому, чтобы опровергнуть или подтвердить на реальном вертолете всё это, ни один здравомыслящий не решится, и даже не из-за опасности отказа, а из-за неоправданного износа двигателя, который стоит огромных денег (несколько млн $).
-
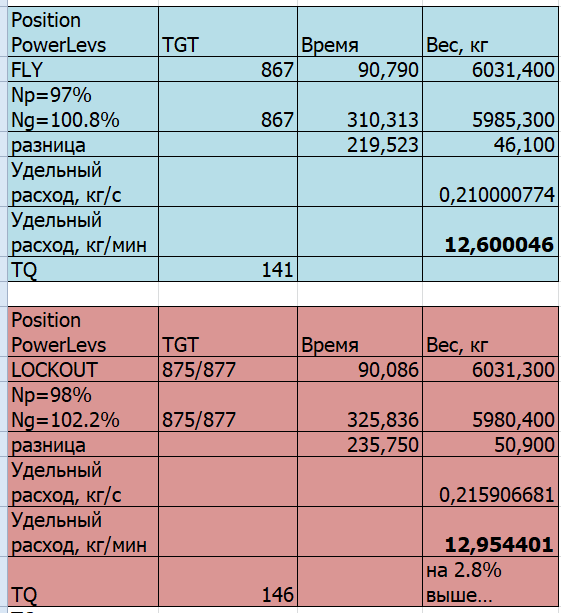
да, действительно ответил я немного не о том) сейчас проверил сам, перехватил в Вашем треке управление. Сделал два теста: в режиме FLY и в LOCKOUT. FLY(TGT=867, Np=97%, Ng=100.8%) Ce=12.6 кг/мин LOCKOUT(TGT=877, Np=98%, Ng=102.2%) Ce=12.954 кг/мин Тест делал в режиме активной паузы на земле, чтобы условия максимально уровнять. Т.о. получилось у меня в "правильную сторону" разница, см.скрин. Т.е. бОльшая температура, чуть больший расход, хотя, справедливости ради, это не всегда верно в практике т.к. при уменьшении Np менее оптимальных за счет увеличения ОШ НВ уменьшается расход воздуха через тракт двигателя, температура растет, а расход топлива немного снижается (совсем чутка). Т.е. расход топлива связан не только с температурой TGT, вот что хотел сказать. null

-
Про ПОС - видимо в этом году) Про разность температур. При старте миссии, для повышения реализма двигателей, они всегда "делаются" с некоторым отклонением (допустимым) в геометрии входного тракта. Это сделано для того, чтобы двигатели не были как "двое из ларца", и немного отличались бы друг от друга. Отклонение от идеальных параметров вычисляется случайным образом. Набор случайных чисел, из которых потом выбирается также случайное значение, каждый раз разный. Этот набор и то самое случайное число, что было "выбрано" при старте миссии, непременно записываются в трек, это условие сходимости треков (в этом аспекте только, т.к. они могут "разбегаться" по другим причинам). Таким образом, каждый новый запуск миссии - это двигатели, отличные не только между собой, но и от двигателей из прошлого запуска миссии (в пределах допустимого конечно).
-
попробуйте тогда без SAS. Если пока получается не очень хорошо, то на первых этапах освоения следует себе повторять во время управления: "короткие-плавные-двойные... короткие-плавные-двойные..." (движения имеется ввиду ОУ). Это чтобы нейронные связи новые образовались, отвечающие за такую моторику. Затем, когда освоите без SAS, включите SAS, но теперь вместо нескольких потребных затухающих (по амплитуде) движений РППУ, как было без SAS, потребуется одно управляющее движение РППУ и 0.1..0.2 от первого "останавливающее" движение РППУ в противоположную сторону. Т.е. SAS это некий помощник, "подаван", который остальную черновую работу доделывает)). Думаю в таком восприятии Вы с ней подружитесь)
-
планируется.. "и прочие неисправности" - то же)
-
а Вы пробовали менять положение РОШ при включенном режиме ATT-Hold (Attitude Hold)? Должно получаться то, что Вы просите - т.е. поддержание угловых положений при допустимой корректировке канала высоты с помощью РОШ ПС. т.е. увеличение/уменьшение ОШ НВ, которое вызывает моменты по рысканию, тангажу и даже крену будет компенсироваться за счет работы САУ - она чутка "подвинет" силовые штоки гидроусилителей, которые изменяют шаг РВ, тангаж и крен соответственно, и потому угловое положение в пространстве окажется неизменным.
- 43 replies
-
- 1
-

-
- сау вертолета
- scas
- (and 8 more)
-

Вывод объектива прибора наведения 9К113 на отдельный монитор
PilotMi8 replied to nantonevich's topic in DCS: Mi-24P Hind
так это уже получится модель не ПН, в который (напомню) можно смотреть только одним глазом и при этом ничего другого не видеть, а МФД- типа и цель могу видеть, и окружающую обстановку... моё мнение- читтерство)) -
статистики из практики не имею, но осмелюсь считать, что если речь именно про "ЛА" (а не про отдельный винт) - то ЛА не попадет всеми винтами в РВК. Сам по себе винт (большой ли он, маленький ли) - может попасть любой. Однако применительно к такому ЛА, как в видео, попасть все винты одновременно - крайне малая вероятность, это надо конкретно "загонять" ЛА в режим. А попадание ЛА во время практического применения по назначению будет маловероятным.. предполагаю так: потоки воздуха под ЛА такой компоновки сильно неравномерны, и в режиме снижения, если "первый" винт умудрится попасть раньше другого, то этот "первый" винт резко перестанет тянуть (при этом "другой" продолжает), значит тогда появится неравномерность тяг этих винтов, ЛА начнет изменять угловое положение, испытывать раскачку по крену /тангажу и заодно менять картину обтекания ЛА. ВК не должно "зацепиться". Еще также инерционность винта/ЛА имеют значение. С более массивного винта "сдуть" ВК (поменять картину обтекания) имхо сложней, чем с маленького. Но конечно лучше исследовать)) когда потоки с кучей вихрей, то могут быть различные варианты, а значение вероятности каждого из них - неожиданным))
-
не очень ясно утверждение, что если "...РВ гироскоп, то соответственно балка сама по себе не создает ни сил ни моментов.." - какая связь?)) Про создание/несоздание сил и моментов балкой. Как только появляется угол при обтекании (скольжения или атаки), то у балки появляется сила, которая вносит свой вклад в общую сумму сил. Сила, удаленная от центра масс непременно создает момент силы. В модели динамики балка является элементом всей конструкции фюзеляжа, и потому силы и моменты для балки при различных углах скольжения и атаки после продувок не определяются отдельно, но входят в суммарный результат продувок фюзеляжа с остальными элементами конструкции: основной "тушкой" фюзеляжа (с турелью и пушкой), крыльями, стойками шасси, втулкой НВ. Силы и моменты от киля, стабилизатора и надвтулочной РЛС добавляются отдельно. Подвески на пилонах - отдельно. Обтекание фюзеляжа имеет не простую картину, прежде всего потому, что центр приложения аэродинамических сил не имеет постоянного положения, и в зависимости от угла скольжения и атаки "плавает" относительно продольной и вертикальной осей. Поэтому и "картина" моментов от фюзеляжа также меняется. А результат всех этих влияний: момента от НВ (не реактивного, а от вектора силы тяги и от горизонтальных шарниров, которые дают моменты по тангажу и крену), сил и моментов от РВ, от фюзеляжа, от киля и ГО, моментов инерции - игрок наблюдает во время пилотирования - каждые 166 раз в секунду пересчитываются ВСЕ силы и моменты, определяется итоговые их значения, которые и "поворачивают", "двигают" кабину вместе с летчиком туда, куда рассчитывает модель)). И да, при отломе балки предусматривается изменение ИД для расчета не только со стороны изменения массы и центровки ,но и от изменения аэродинамики фюзеляжа.
-
будет, РИ-65 будет переработан
-
так трек-то дадите? если судить (теоретически ) по Вашему описанию - всё работает (или не работает) штатно, см.документ-вложение про УПК давно сообщали: пока не планируем 24_Weapon_Summary_Logic_ver5.pdf
-
хорошо бы трек потому как в игре используется несколько типов ПТУРов (вт.ч. и с неконтактным взрывателем). Не ясна дальность пуска. И даже если все условия соблюдены трек поможет найти неисправность, а не просто ей "любоваться"
-
Баги, проблемы Великолепной Восьмерки
PilotMi8 replied to Kotov's topic in DCS: Ми-8МТВ2 Великолепная Восьмерка
это что-то с восприятием. Мы в Ми-8 управление и динамику полета никак не трогали Звуки меняли, был замысел их более разделить по секторам (как было сделано в Ка50), и версии настроек получили одобрение у нескольких летчиков и техников. Мы все разные, восприятие разное, тем более, когда звук в игре создается совсем не так как в реальности. Но еще послушаем.. понастраиваем, раз есть вопросы. Тем, кому кажется звук не таким - приложите плиз свой референс и желательно в сравнении с тем же местом и режимом из DCS. Потому как сложно понять где звук не такой. Я в Газели например не летал, но если человек который в ней летал даст референсы, где Ми-8 похож на Газель - будем благодарны! Пока что посмотрим про пояснение OnAira про закрытую и открытую дверь грузовой кабины... это может пригодится так сейчас есть или так должно быть, а этого нет? -
починили, теперь должно быть чётко. Должно войти в будущий апдейт..