Xpendable
-
Posts
77 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Xpendable
-
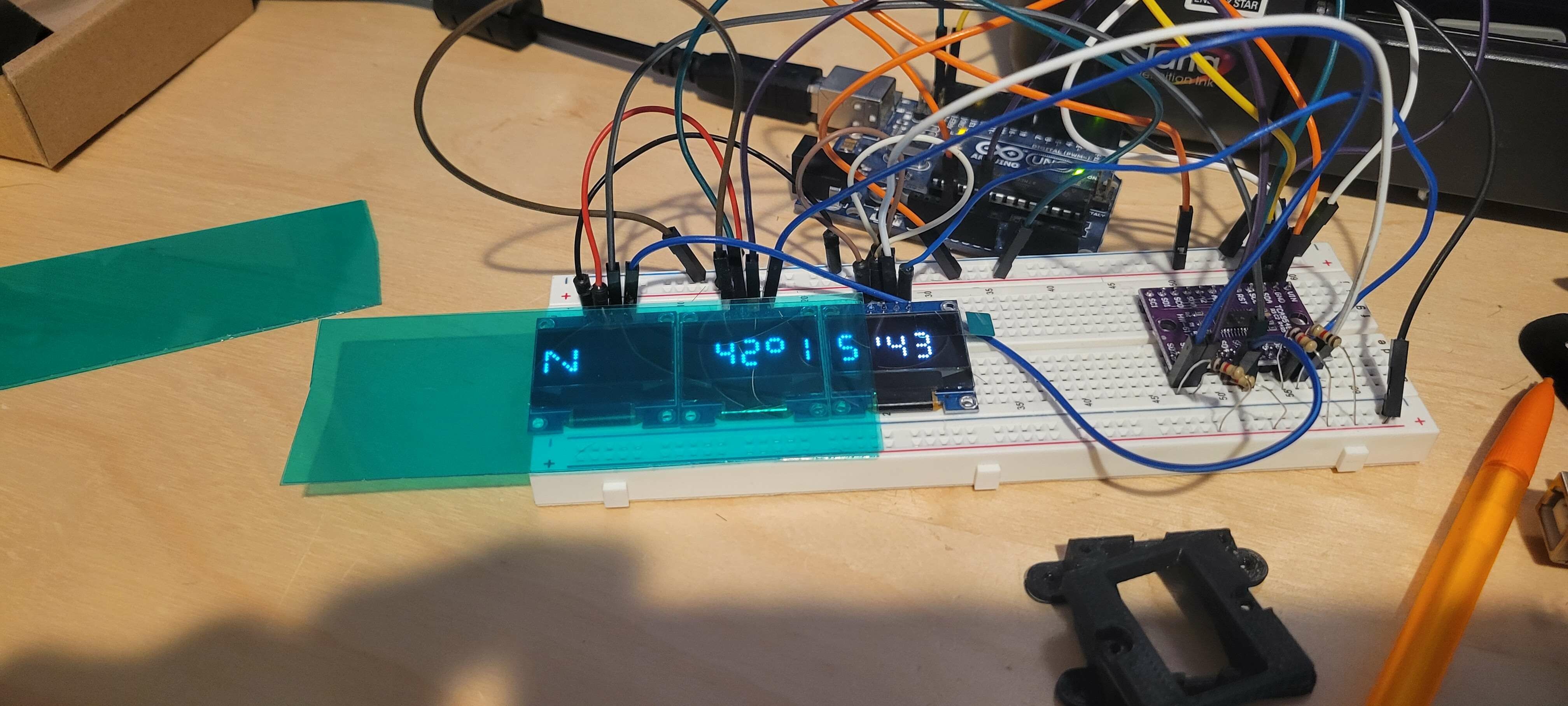
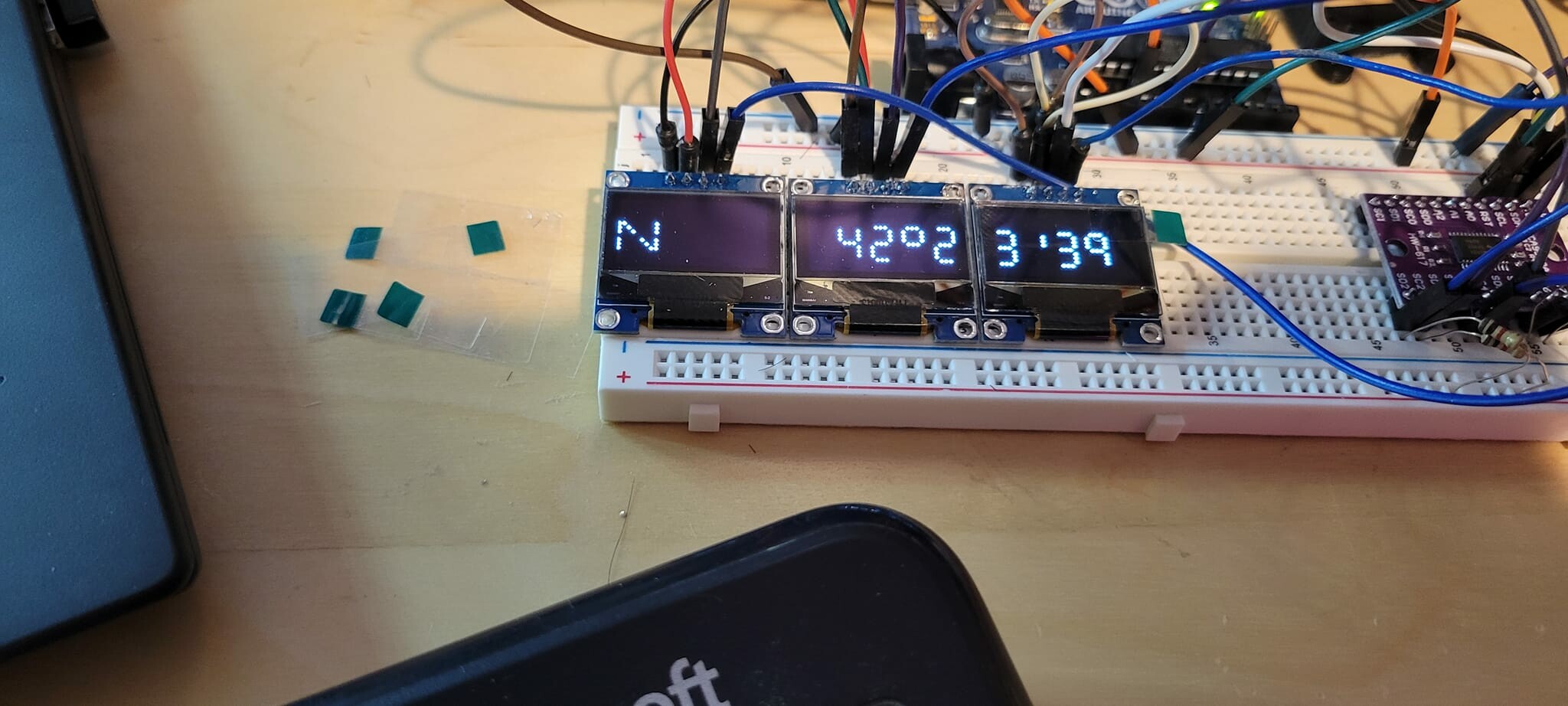
By the way, for the UFC, I found that 128x64 pixel ssd1306 OLED displays work really well. I replicated the Harrier fonts using 5 pixels to represent a dot. I found that I could use 3 of these displays for the scratchpad, and it works pretty well. You can turn them green with a filter.

-
I've been designing a new UFC from scratch as part of the OpenHarrier project. I'm attempting to make it more accurate and am doing a pretty decent job of replicating the Harrier's UFC displays by using inexpensive OLED displays. (You can get 5 of these for between $10-$15 for all 5 off of Amazon). I written custom Arudino code that replicates the dot patterns of the VFD displays. Each "dot" is actually made from 5 pixels on the displays. I intend to use a thin piece of green tinting over the displays change it from the white color to a green color.
-
Just flew last night in multiplayer with the latest patch. I had no issues at all. If the plane is yawing when you roll, then it sounds like you have multiple input devices assigned to rudder or some other weird thing. Just go through all your input settings for pitch, roll, and rudder and check every column to make sure the same axis isn't assigned to multiple controllers.
-
Interesting. It's 100% stuck for me. No amount of rudder deflection will get the ball to move even a cm. Whether in flight or while taxing. It's permanently stuck, even if I cross control (full left alerion and full right rudder, it's still stuck in the center for me. I may have to test it again to confirm. Regardless, this is 100% inaccurate. I'm a real pilot, and this is not how it's supposed to work.
-
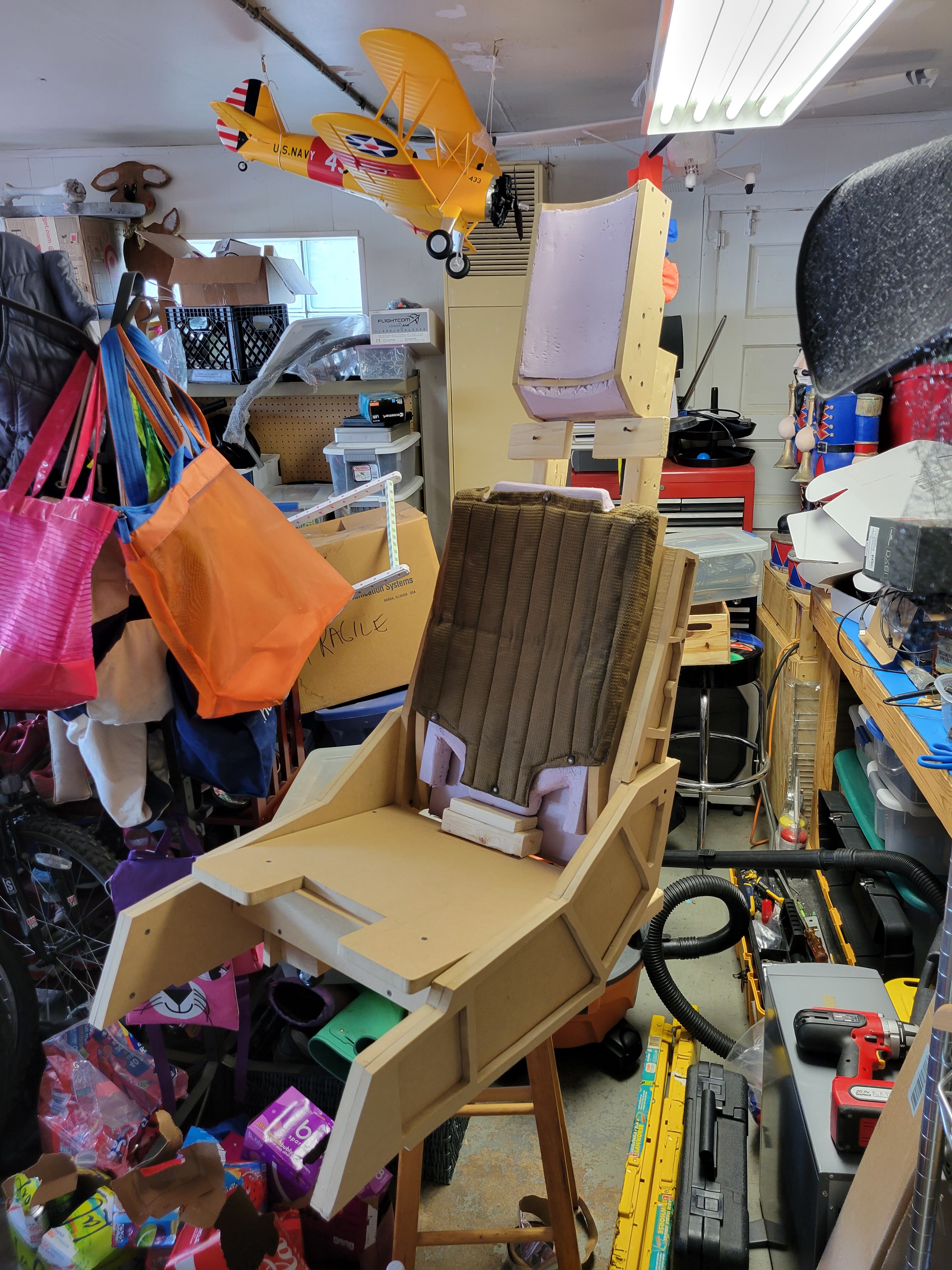
Been a while since I posted about this, but the seat is 95% finished. Little details here and there are still needed.
-
The slip ball in both the HUD and the analog instrument have been STUCK dead center for more than half a year now. Would be great if this could be fixed.
-
This is exactly what I have been working on, using the TekCreations displays from their F18 UFC DIY kit for the ODU displays. Have you joined the OpenHarrier group on Facebook and/or Discord? I am still early on the build for the ODU but have made a bunch of progress. The STL files are available on our Github repository but I have yet done the PCB. Here are a few pics here: https://openharrier.org/build-photos/odu/
-
I would vote for this. It's a pita to shutdown to change and then start again.
-
Yes, the caution on AFC off is common and expected. Harrier pilots get used to it. When you get the caution, you glance at the advisory panel and make sure it's only the AFC blinking and you hit the caution reset. Switching AFC to reset will also kill the caution, so that's what I do with a 3 way switch. I flip it to reset and then back to on or off.
-
Yep. The changed it to be accurate. This is what the real plane does. Airspeed is not available until you exceed 30 knots.
-
When the restock timer ended on 12/12/2022, I and many others tried to get in to place orders. It appears all of us put a huge load on their web server and crashed it, possibly multiple times. I checked it at about every minute. For a few hours, it would only partially load. When it finally was fixed, the items that were to be restocked all indicated out of stock. I do not believe they actually had any new stock this time. I suspect they had supply chain problems and no new stock was ever available this time around and we crashed their server from everyone trying to order what was supposed to be available again. I do not know why they don't just take your order and set up a queue like every other company and fill those orders in the order they are placed when stock becomes available. Maybe it is a Chinese thing. It is frustrating. I have trying to order the MFD's which is funny because I have their screens, just not the MFD's that go in front of them. I don't mind waiting, but I should not have to set my alarm to wake up and battle every one else when stock is supposed to be replenished and hope their website can handle the load. Especially when it was for nothing because they likely didn't get any new stock.
-
Generic AV8B inspired Simpit Cockpit evolution
Xpendable replied to Thanatos31's topic in Home Cockpits
Excellent work. I like how you've solved problems and iterated over things making it become ever more functional. I can't wait to finally start pulling some things together and have working controls in my own pit. Probably won't be able to start cutting wood for the cockpit until after the new year, but that's okay. I am going to get there! -
Latest update. 3d printed manual seat release, 3d printed inertial reel lock release, rebuilt the back so tubes and extruded aluminum bars have correct gap between them. Recarved stryrofoam seat back (still needs fiberglass) and made my own seat cushion. Lots more still to do!
-
Some recent progress on actual construction...
-
Post MotherBoard Specs Of Bricked TM Warthogs Here Please
Xpendable replied to twobells's topic in Thrustmaster
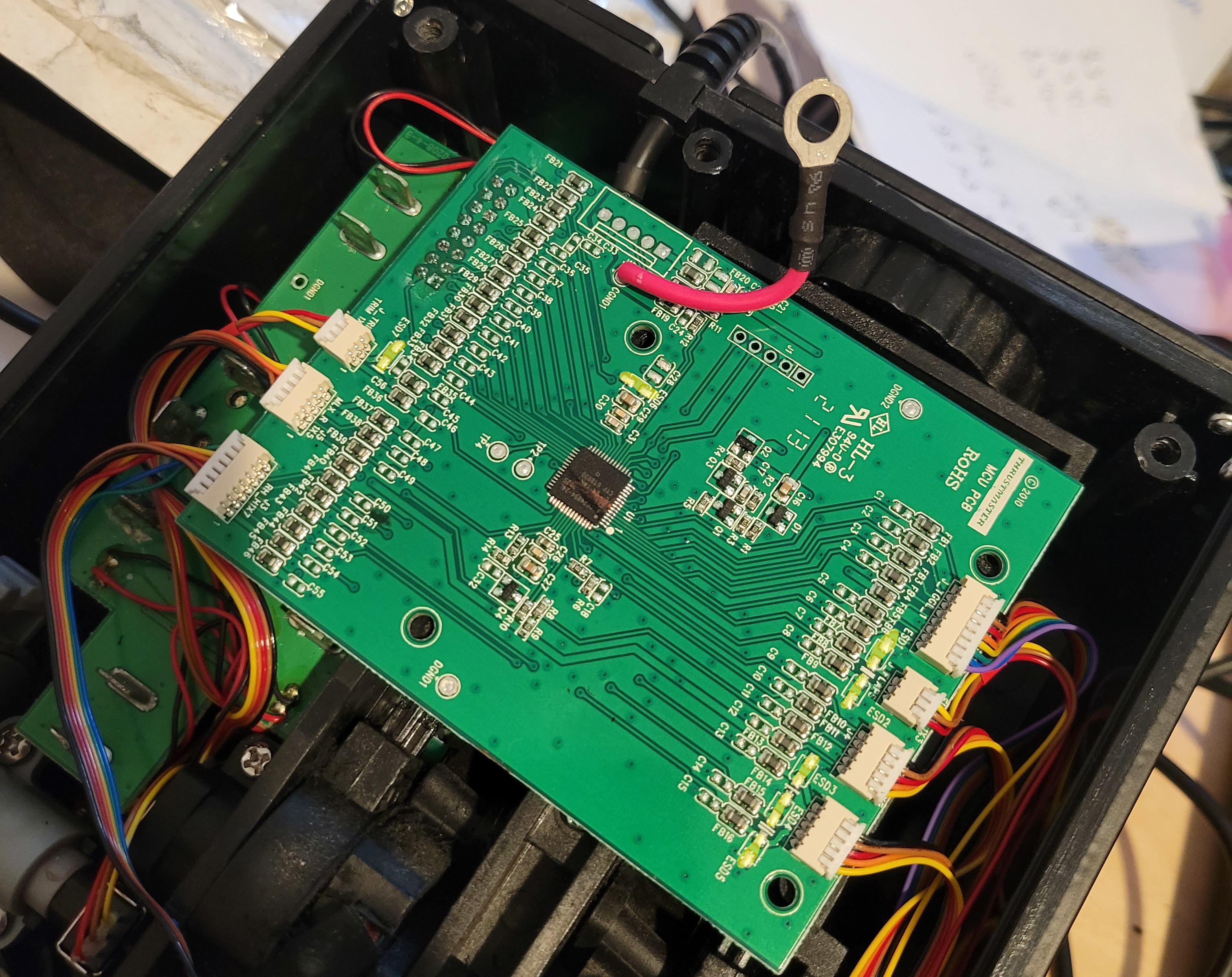
I just had the same "bricked" issue occur to me on a Thrustmaster Warthog throttle purchased in 2018. I ordered a replacement mainboard from Thrustmaster for about $70 US including shipping, and it shipped from France. It came pretty quickly. I think I had the order in by Monday, and it was here today (Friday). Here's a picture of the replacement board, which is identical to the failed board except the size of the PCB was slightly smaller. My original has 1808 printed on the silkscreen instead of the 2113 printed on this one. I also highlighted 7 ESD pads that are not populated. I saw on this thread that some people have populated ESD6, but what about ESD 1-5 and ESD 7?
-
It is a private group at the moment, but you should be able to find it and request to join. This may help: www.facebook.com/groups/openharrier/
-
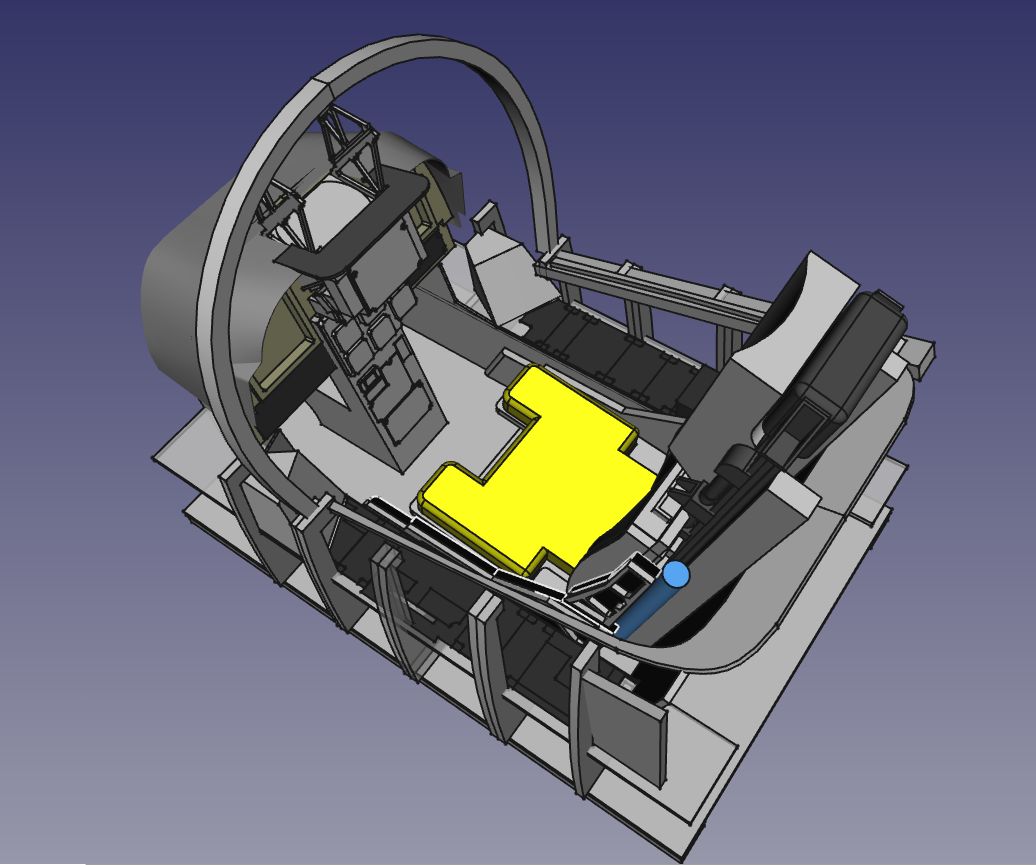
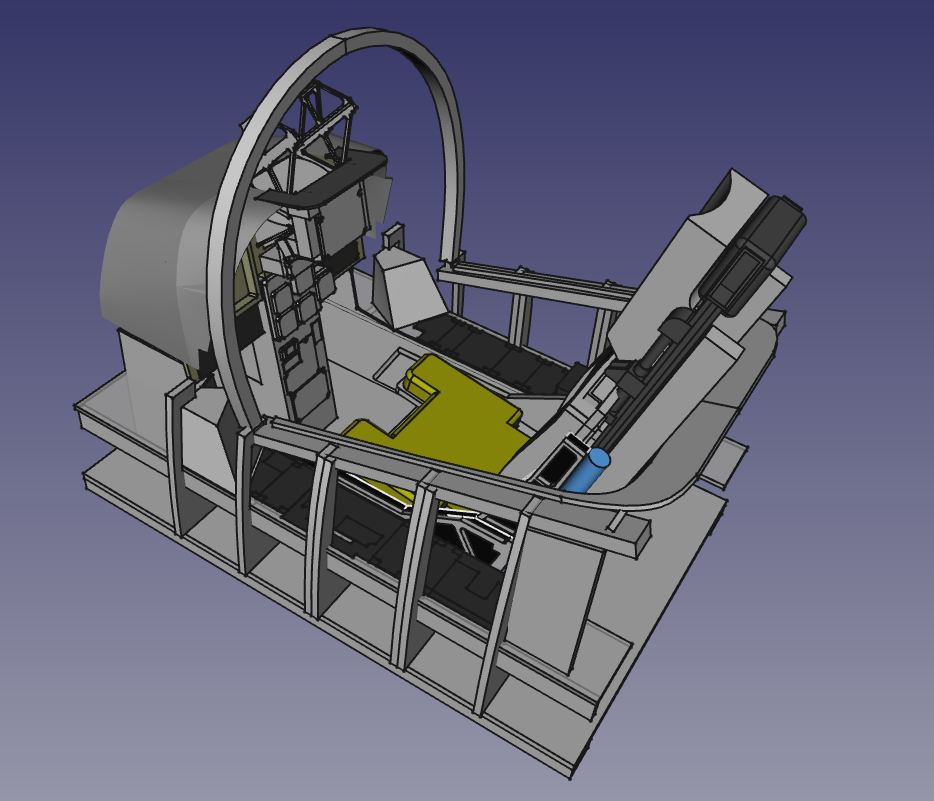
I did create an OpenHarrier faocebook group. It's just 2 of us so far. Feel free to find us and I'll accept you. I've been working on a CAD model for the seat and cockpit in FreeCAD. I've gotten pretty far as you can see from this screenshot. Still a long way to go. Hope to start construction in March.
-
I have lots of experience operating 12V solenoid valves from Arduinos, but I use relays instead of MOSFET. But its basically the same principle. Are you powering both the solenoid and the Arduino from the same power source? If so, the current draw from the solenoid could actually be starving the Arduino and may cause it to reset. I've had problems with this in the past and will often provide a separate, isolated power supply to the solenoid valves so that current draw does not affect the Arduino. I've run as many as 16 rapid fire 5-way pneumatic solenoid valves off a single Arduino, but isolated power supply is a must for that. The current draw from the relays was also a problem, so I use a separate 5V regulator that is fed from the same power source going to the Arduino. The grounds are connected between that separate 5V regulator and the Arduino (necessary in order for the digital IO signal to work with the relay boards). I should point out these relay boards use opto isolators and flyback diodes for the relays. I would have to add those things if I were going to use a raw relay. And for the record, I have controlled a solenoid from an Arduino directly, using a TIP transistor. Here's a demo without solenoids connected:
-
I'm going to be building a full scale AV-8B Harrier simpit in my basement. I'm starting an "OpenHarrier" group and plan to share all files I create for the greater good of the hobby. For the past couple of months I have spent countless hours building up a CAD model in FreeCAD. I want to use as much free and open source software tools as I can over using paid software. I'm not planning on selling anything, and sharing is caring. Anyway, here's what I've got going so far. The construction geometry is only draft placeholder stuff for right now, as I figure out the size and materials that I'm going to use to recreate the different pieces. I have a long way to go. I hope to start actual wood construction in about 1-2 months and I will certainly be sharing my models by then. For now, here's a taste:
-
This is really looking great! I can't wait to start building my own throttle (and the whole darn cockpit!). I've spent crazy hours modeling up the cockpit in FreeCAD. I'm getting closer. I haven't yet worked out the construction geometry yet... that is all place holder & draft construction that is work in progress at the moment. I hope to start building maybe next month, March at the latest. I'll be sharing my files on the OpenHarrier FB group & GitHub. Because sharing is caring!
-
[Reported] "Hyper-Roll" flight model issue observed
Xpendable replied to Xpendable's topic in Problems and Bugs
After some more testing, I estimate the "hyper roll" to be more like 1.5 revolutions per second, not 3 to 4 per second. I calculated this by taking the video into a video editor and counting the revolutions over 1 second worth of video. I can't achieve that roll rate without AFC on. The other thing that I have observed is that only my first plane / spawn after loading the mission is able to achieve unlimited sustain roll without blacking out. After I purposely crash the plane and use subsequent planes, I'm unable to achieve sustain rolls without blacking out. If I exit the mission and restart, my first plane will again be exempt from blacking out. Subsequent spawns will black out. So... that could be an ED bug maybe? Will be interesting if someone could try other planes and see if they get that same result. I recorded a video, will post a link to it when it's uploaded to YouTube. First hyper-roll at 2:42 After second spawn, you can see blackout occurs at 10:45 -
Witnessed something really weird this morning with the Harrier. Jet #1 I was able to get the Harrier to roll at "hyper speeds" like it was an A4 Skyhawk. I was flying a clean jet on the Caucuses map, low-level (100-1000 feet AGL near Kobuleti) with about 6.6 fuel state. Initial configuration was full fuel, no stores. Performed a STO takeoff and flew around low-level pullling no more than 4.5 G's. Did a low pass over Kobuleti runway, and pulled up 5 degrees and started rolling. Noticed that while holding a sustained left or right roll at level attitude or near level attitude, I was able to achieve something like 3-4 full 360 rotations per second continuously without blacking out or redding out. Eventually I held the roll in continuously for more than 30 seconds (I am not sure how long) and the engine quit. Also note that no pitch adjustment was needed to enter or sustain the roll. I may have had AFC on. I thought to myself... this is odd. The Harrier shouldn't be able to roll this fast. I mean this is crazy fast. Something is wrong here. When my plane flamed out and crashed, I tried to recreate it and couldn't get it happen exactly the same way, but could still enter the hyper roll but in a different way that causes you to blackout. Note that I wasn't blacking out at all with Jet #1. Jet #2-5 So I tried recreating the hyper roll from jet #1 and can't get the exact same conditions that allows me to hyper roll without blacking out. I can get it into a hyper roll, but the pilot blacks out after a few seconds. The roll stops when the pilot blacks out. Also, I now have to put in some nose down pitch for the roll - it will not stay level unless I do this (and will crash into terrain if I don't). The only way I can enter the hyper roll is with AFC on and holding slight pitch down on the stick. With AFC off, the hyper roll will NOT ever occur, and if I don't apply a slight pitch down on the stick, no hyper roll will occur. If hyper roll does occur (with AFC on and slight pitch down being held), pilot blacks out after a few rotations. Remember that with Jet #1, no pitch adjustment was needed for the roll, and I think AFC may have been on but I am not sure. I have not since been able to recreate the hyper roll without blackout. Would love for others to try it out. I'll try some more later today and see if I can get a video of it happening.
-
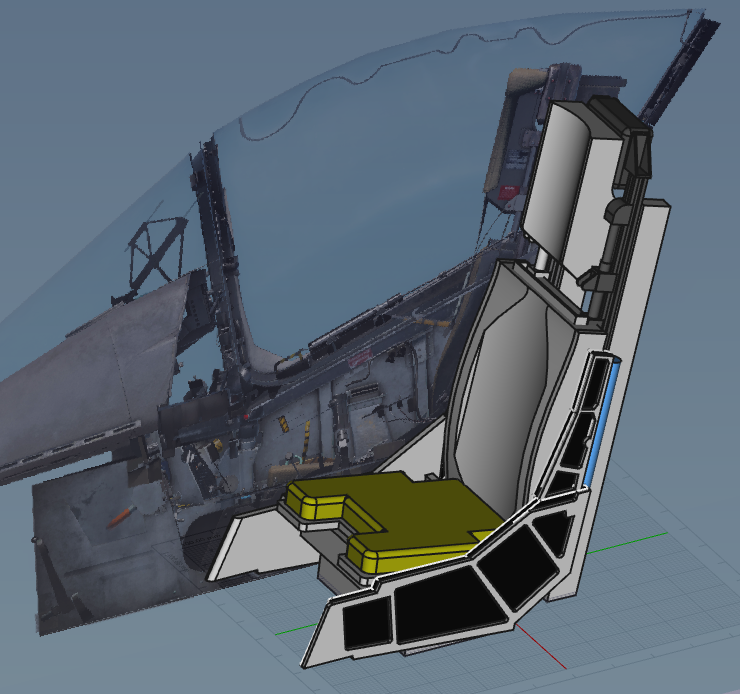
Here's the latest progress on my CAD model. I figured out how to use the ModelViewer2 to generate planar ortho images to use as references in FreeCAD. I had to rework almost the entire model, but it's starting to get there! I also obtained real seat back and head rest pads from a real AV-8B...
-
I forget which is the default, but mine is default which means if I move the TDC it will do the TDC action for me. I do have the TDC action bound as well.
-
Suburban Pit - Home Build on a Budget(ish)
Xpendable replied to AngryEchoSix's topic in Home Cockpits
Nice job. I like it!