GrayZeeCat
-
Posts
114 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by GrayZeeCat
-
У меня i7-3770k 3.5 GHz без разгона, RAM DDR3 32Gb и RTX 4080 16Gb, DCS и папка Сохраненные игры на SSD, настройки графики все на максимум. На разрешении 1920х1080 в простых миссиях ФПС упирается в ограничение, установленное в настройках в игре - 180 к/с, CPU bound (rendering thread) периодически оверлей показывает, но на что влияет не понятно, фризов нет, обзор и управление плавное. Для теста через генератор миссий запускал с максимумом всей техники, погода - шторм, ФПС 120-140, CPU bound (rendering thread) постоянно, фризов нет, обзор и управление плавное. А вот на разрешение 3840х1080 (два монитора) тяжко ему, сейчас попробовал через генератор миссий с максимумом всей техники, погода - шторм, ФПС 40-70, CPU bound (rendering thread) постоянно, CPU bound (main thread) периодически, обзор и управление не сказать, что прям дерганые, но некомфортные точно. И это еще даже не 4К. Карта Кавказ. Возможно, еще от модуля выбранного для управления, зависит, глубоко не копал, я пробовал на Ми-8.
-
У меня точно такую же лесенку бывает видно, но я увидел не на облаках, а когда через стекло АСП-17 смотришь на объекты. У меня подозрение, что это из-за настроек сглаживания в игре, так как до этого вроде не замечал лесенок, а потом с настройками графики игрался, в том числе и со сглаживанием, и появился этот эффект.
-
Это Мини-ИЛС, включается в настройках на вкладке Игровые
-
Ясно, понял. Он единое целое со спинкой, да и в целом весь каркас металлический, специально под свои габариты и вес искал покрепче. Со стулом беда конечно, на табуретке играть не охота Спасибо за помощь!
-
Это только к калибровке относится, или поиграть с такой железякой возле головы без отключения магнитометра не получится? Ветку читал, видимо не обратил внимания.
-
DCS Flaming Cliffs 3 - Баги, проблемы
GrayZeeCat replied to slebedeff's topic in DCS: Горячие Скалы 3
Немного потестил, получилось так: пока повреждений нет на самолете, RAlt+J работает в обе стороны, можно прыгать между бортами. Как только борт получил повреждения (в этом треке правый двигатель), то пересесть в борт бота можно, а обратно в свой уже нет. И еще бот после этого на команды не реагирует, на связь не отвечает, летит куда-то по своим делам)) Трек. Длинновато получилось, пересадка в почти самом конце, после повреждения двигателя. RAltJ_bug.trk -
DCS Flaming Cliffs 3 - Баги, проблемы
GrayZeeCat replied to slebedeff's topic in DCS: Горячие Скалы 3
Вечером попробую воспроизвести, запишу. -
DCS Flaming Cliffs 3 - Баги, проблемы
GrayZeeCat replied to slebedeff's topic in DCS: Горячие Скалы 3
Это понятно, но по ДМ боты вроде раньше двигатели теряли, или в случае когда пересаживаешься, боту самолет целым передается, статус повреждений не сохраняется? А по поводу невозможности обратно в свой борт пересесть по RAlt+J что-то можете подсказать? -
DCS Flaming Cliffs 3 - Баги, проблемы
GrayZeeCat replied to slebedeff's topic in DCS: Горячие Скалы 3
Добрый день. Вопрос про пересадку в другой борт по RAlt+J. В быстрой миссии на СУ-25, Средне-Грузинское Предгорье, летаю с ботом, оставил его в зоне. Отстрелял все вооружение, получил повреждения от ЗА, пожар левого двигателя, потушил, движок выключил, повторно запустить не смог, ок. Пересел на борт бота, все норм, бота отправил на точку. Потом захотел вернуться обратно на свой борт, но комбинация RAlt+J уж не работает. Это так и задумано, что вернуться обратно в тот борт, с которого пересел нельзя, или баг? Поиском поискал на форуме, но похожего вроде не нашел. И после того, как мой борт под управление взял бот, у него чудесным образом левый двигатель заработал, видно по оборотам в статусной строке, что оба работают, да и по полету видно, ни крена, ни скольжения, РН прямо в течении всего полета до посадки. Роботы в полете самолеты ремонтируют?))) -
Понял, попробую еще раз откалибровать магнитометр с учетом замечаний. Калибровал на голове, головой крутил вроде сильно, чуть шея не сломалась))) Трекер у меня проводной, длина проводов между датчиком и ардуиной см 30 - 40, потом обычный кабель USB до порта компьютера. Насчет смещающегося металла относительно магнитометра, незакрепленные провода от датчика до ардуины тоже такой эффект дают? Во втором файле как раз провод был не закреплен, только датчик примотал к ободку. У меня металлический каркас кресла сразу за затылком (подголовник), относительно датчика он тоже будет смещаться во время калибровки, но у вас в инструкции Как правильно калибровать Магнитометр написано, что предпочтительнее калибровать в том месте, где трекер потом будет находится во время игры. Откалибровать сидя на табуретке, чтобы металла рядом не было? Или с такими вводными (металл возле затылка) не получится заставить его корректно потом работать? Спасибо!
-
Отклоняется в калибраторе, до opentrack еще не дошел из-за этого. Да, я центровку выбирал разную, мануал с сайта внимательно изучил, видел указание на это, но ни [ Center Y,P ], ни [ Center Yaw ] ситуацию не исправляют. Тут конечно 100% параллельность я мог не соблюсти, попробую более точно разместить платы. Файлы приложил. Спасибо! s02_Mag_2403111942_наушники.fltM s02_Mag_2403112131_ободок.fltM s11_Mag_2403122204_ободок.fltM
-
DCS: Ми-8МТВ2. Руководство пилота
GrayZeeCat replied to PilotMi8's topic in DCS: Ми-8МТВ2 Великолепная Восьмерка
Спасибо за ответы. Все как обычно упирается в регламенты конкретного подразделения или аэродрома. Одна из самых зарегулированных отраслей (авиация), но ответ на простой вопрос ни в одном общем документе не написан, классика -
Приветствую всех. @GO63, может подскажешь по инерционному трекеру. Не могу победить поворот по Yaw при наклоне по Pitch. Получается, как у тебя на сайте написано, наклоняешь назад - поворот влево градусов на 10-12, наклоняешь вперед - поворот вправо на те же значения. При этом пружины по Yaw нет, если просто влево-вправо поворачивать по Yaw. При повороте по Roll смещения нет. Пробовал на двух версиях датчиков: GY-85 (HMC5883L) и сборный GY-521 + GY-273 (HMC5883L). Датчики старые, покупал наверное лет 10 назад, тогда же был собран трекер на Arduino Nano + GY-85, с прошивкой вот этой https://sourceforge.net/projects/gy80facetrack/. Работал вроде нормально. Сейчас вернулся к полетам в DCS, решил обновить трекер. Сборка Arduino Nano + GY-85, залил твой скетч Razor AHRS 5DOF [20191019]. Откалибровал магнитометр, Mag st ~0.99, Rmax/Rmin тоже чуть больше 1. Откалибровал гироскоп, Gyr st ~ 0.6 гр/сек. Акселерометр не трогал, Acc st ~ 0.96 g. Поведение трекера, как в начале поста описал. Подумал, что может датчик не фонтан. Спаял бутерброд GY-521 + GY-273. Сборка Arduino Nano + GY-521 + GY-273, залил твой скетч Razor AHRS 5DOF [20191019]. Откалибровал магнитометр, Mag st ~ 1.0, Rmax/Rmin ~ 1.22. Откалибровал гироскоп, Gyr st ~ 0.06 гр/сек. Акселерометр не трогал, Acc st ~ 0.98 g. Поведение трекера опять такое же. Магнитометр пробовал калибровать сначала на дужке наушников, потом на пластиковом ободке для волос, думал может наушники наводку магнитами дают, но нет, ничего в поведении не меняется. При отключение магнитометра (М ---) поворот по Yaw исчезает при наклоне по Pitch, но естественно появляется небольшой дрейф, на GY-85 заметный (там Gyr st ~ 0.6 гр/сек), на бутерброде GY-521 + GY-273 почти незаметный (Gyr st ~ 0.06 гр/сек). Центровку пробовал разную, [ Center YPR ], [ Center Y,P ], [ Center Yaw ] - поведение трекера не меняется. Может место проклятое )) (с)
-
Я планировал БП подходящий по параметрам взять на покупку и проверить, так кота в мешке покупать конечно не буду. РУД не проблема, у меня сейчас Х52, от него вполне можно использовать, а от G940 только ручку, на нем, насколько я понял, она основное устройство, а все остальное к ней подключается. Это четверть стоимости РУСа от VKB/VPC, вот и думаю, стоит ли связываться или нет только из-за FFB. Или сразу VKB/VPC брать.
-
Я для вертолетов думал его попробовать, чтобы триммирование на реал похоже работало.
-
Добрый день всем. Есть сейчас смысл брать G940 ради FFB? За 10 т.р. предлагают полный комплект без БП, состояние почти новый. Или лучше VKB/VPC и для вертолетов снимать пружины и затягивать демпферы, как AlexandrT написал? Летаю на всем по немного, кроме поршней.
-
DCS: Ми-8МТВ2. Руководство пилота
GrayZeeCat replied to PilotMi8's topic in DCS: Ми-8МТВ2 Великолепная Восьмерка
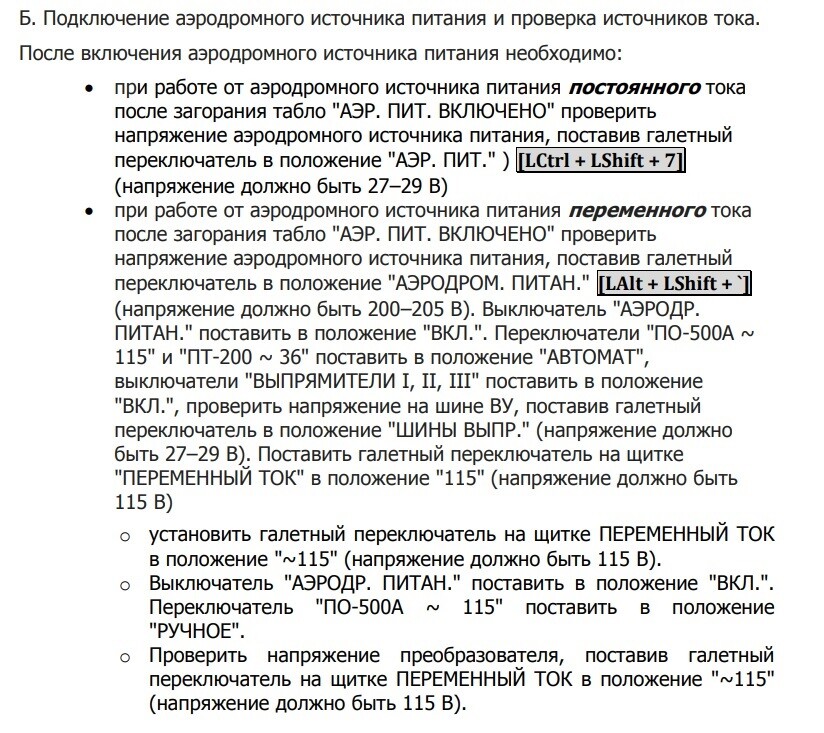
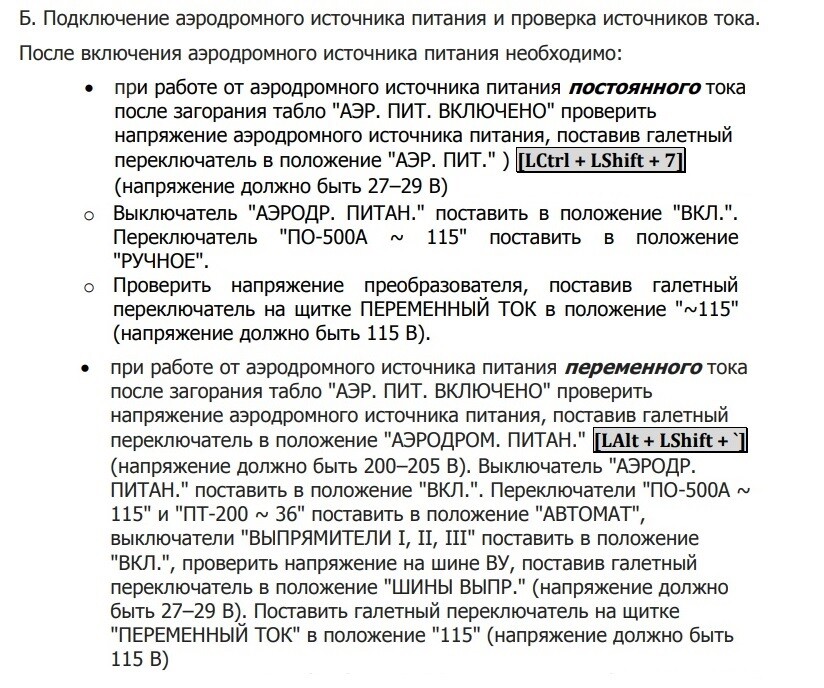
Здравствуйте. В разделе 9.2.2 в части "Б" тоже опечатка закралась. Сейчас, как на скрине 1 null Полагаю, должно быть как на скрине 2 И еще пара вопросов. Первый. В руководстве пилота в разделе 9.2.2 в части "Б" в пункте "Продолжение подготовки и контроля оборудования и систем" сказано "убедиться, что выключатель СПУУ-52 находится в положении ВЫКЛ., при этом горит кнопка-табло на центральном пульте борттехника". А в РЛЭ Ми-8МТВ (ДВТ от 14.05.94), которое в сети гуляет и на форуме его выкладывали, в разделе 4.8.10.1, часть "а", п.5 "Система подвижных упоров - Включена, исправна – КВС. КВС включить выключатель "СПУУ-52" и убедиться, что кнопка-табло "ОТКЛ" погасла, а подвижный индекс нулевого индикатора от крайнего левого положения переместился вправо на определенную величину в зависимости от давления и температуры воздуха у земли". Насколько я понял из устройства СПУУ, пока педалями не пользуешься, разницы нет, когда его включать в работу, до или после запуска двигателей. А порядок включения зависит только от того, как в конкретной версии РЛЭ написано? И второй. Не смог найти точного определения момента времени запроса у РП разрешения на запуск, до запуска ВСУ или после? В качестве примера, в быстрой миссии "Холодный старт" на Кавказе общение с РП идет на частоте 4,7 МГц, а такую частоту можно установить только на связной радиостанции Ядро-1А. А она без напряжения на шине ВУ не работает. Напряжение на шине ВУ можно получить либо подключив аэродромное питание, либо запустив ВСУ, включив резервный генератор и выключатель "ПРОВЕРКА ОБОРУД.". Если нет возможности использовать аэродромное питание, то без запуска ВСУ связаться с РП не получится. Или запуск ВСУ осуществляется на усмотрение экипажа, без запроса РП?
-
Курилка Ми-8 (обо всем)
GrayZeeCat replied to on-air's topic in DCS: Ми-8МТВ2 Великолепная Восьмерка
1. Из бутылки со спиртом доливаем в воду 100 спирта, получаем 1бут - 300с, 2бут - 400в + 100с 2. Из 2-й бутылки доливаем в 1-ю 200 смеси, получаем 1бут - 300с + 2/5(400в + 100с) = 340с + 160в, 2бут - 3/5(400в + 100с) = 240в + 60с 3. Из 1-й бутылки доливем во 2-ю 200 смеси, получаем 2бут - 240в + 60с + 2/5(340с + 160в) = 306в + 194с, 1бут - 3/5(340с + 160в) = 204с + 96в 4. В 1-ю бутылку доливаем воды до горлышка, получаем 1бут - 204с + 96в + 200в = 204с + 296в Получаем в 1-й бутылке 204 спирта и 296 воды, во 2-й бутылке 306 воды и 194 спирта. Разница в 4мл на вкусовые качества напитка не влияет.:thumbup: -
Курилка Ми-8 (обо всем)
GrayZeeCat replied to on-air's topic in DCS: Ми-8МТВ2 Великолепная Восьмерка
:megalol::megalol::megalol: -
КАМПАНИЯ "Search and Rescue - МИ-8"
GrayZeeCat replied to =ОВЭ=FOXER64's topic in DCS: Ми-8МТВ2 Великолепная Восьмерка
Мы помним )
-
"...Будешь ты летать со свистом, задом наперед..." (с) :megalol:
-
http://forums.eagle.ru/showthread.php?t=171069 http://forums.eagle.ru/showthread.php?p=2723758#post2723758 http://forums.eagle.ru/showthread.php?t=129958 и тд и тп :lol:
-
А как ему сказать, чтоб не сбрасывал подвески при угрозе? А то глупо получается, 40 минут в кампании летишь, заходишь на цель и тут это чудо докладывает "... пуск ЗРК, выполняю оборонительный маневр...", и все, ведомый без подвесок. Ну и зачем ты тогда сюда прилетел? )))
-
Лазерное целеуказание для Су-25Т по коду 1113
GrayZeeCat replied to Tembl4's topic in DCS: Горячие Скалы 3
ТС пишет,"Кажется все, что написано дальше, больше не работает. Спасибо ЕД." Пофиксили уже короче )). -
Об обязанностях обеспечения работоспособности ПО, приобретенного пользователями у компании ЕД, наверное об этих? Я вот лично ничего ни у Белсимтека, ни у Лезернеков не покупал, а у ЕД покупал, и документы есть, так с какой радости я должен к ним обращаться? Они де юро мне ничего не должны.