Aero4000
-
Posts
1272 -
Joined
-
Last visited
-
Days Won
1
1 Follower

Recent Profile Visitors
2638 profile views



![=BK=Chekist [39]](https://forum.dcs.world/uploads/monthly_2021_11/1717660407_(121).thumb.png.890129f4fcb01bdf451eb959562a7ac4.png)
-
Ссылку на такую новость, пожалуйста. О том, что МиГ почти готов. Ибо все думают, что работа над ним только началась…
-
Полетал полтора часа по замкнутому маршруту. Контрольный ориентир - центр аэровокзала Бен-Гурион. Не увидел сильного дрейфа. На 15 минуте выключил GPS в кабине. Ну ошибки накопилось метров 100-200 на глазок. GBU-38 белке в глаз попадают. Вроде нормально всё.

-
Это по способностям. Для освоения любого модуля требуется какое-то время.
-
Баги будут. Обязательно. Это неизбежно. Хоть РД, хоть не РД. И будут исправляться. F-16 сейчас достаточно проработан, на мой взгляд. Обратите внимание. Вам не хочется устанавливать на телефон приложение для двухфакторной аутентификации, поэтому несколько человек должны Вас в чем-то убеждать и уговаривать. А вы могли бы просто попробовать оба этих замечательных модуля бесплатно. Моя непонимать
-
В магазине, на страничке F-16 в том числе, пояснение:
-
Вы получили только один голос в пользу того, что 18 проще для новичка, на основании того, что пользователю авионика и системы показались более логичными у Хорнета. То, что 18 нравится в целом больше других людям, это вполне понятно. Нравятся в целом мне они оба. Палубные операции в новом исполнении, с реализованным довольно серьезным ограничением вертикальной скорости и перегрузки при шмяке на палубу - точно не для новичков. Сие новшество заставляло краснеть и матерых палубников.
-
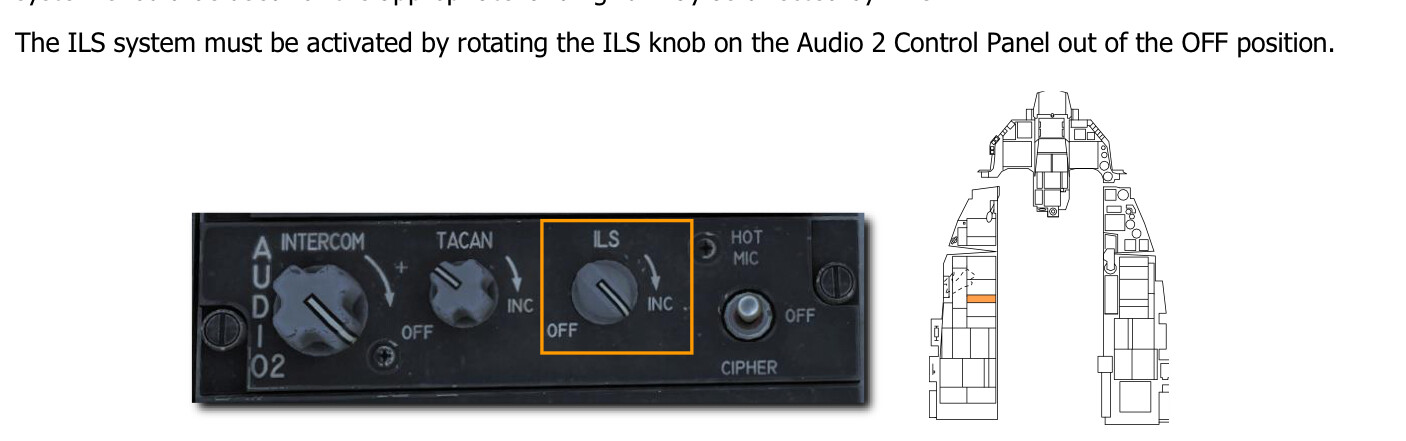
Попробовал воспроизвести аналогичный полет. Сделал 2 захода на 05 полосу. Второй заход размазал до 20nm. Ни ILS ни TACAN не отрубались, позывные прослушивались, директорная марка на HUD (Command Steering) не пропадала, RAW DATA планки (Localiser and Glideslope Deviation) отклонения от равносигнальных зон работали всё время. Ваш трек поможет поглядеть что происходит. Но сначала спрошу, не пытались ли вы полностью заглушить прослушивание позывных ILS на аудиопанели? У этого самолёта особенность есть: крутилка, казалось бы, просто громкости, вырубает полностью аппаратуру ILS. И врубает соответственно. Мануал:
-
DCS это такой квест. Никогда заранее не знаешь, совершаешь ли ошибки сам или сталкиваешься с багом или нереализованной ещё вещью. Когда у игрока что-то не получается, он обычно возмущенно врывается в чат с обвинением всех и вся. Но, в большинстве случаев, имеет место вариант, когда что-то не так делаешь.. И тут лучшая модель поведения - просто написать в форум модуля и спокойненько разобраться, народ поможет.
-
Только вышел. В качестве компактного настольного варианта РУД можно посмотреть в сторону VPC MongoosT-50CM3. Оффтоп.
-
Я могу сравнивать с Saitek X-52 и Thrustmaster Warthog, которыми долго пользовался. Конечно STECS получше все этого, с учетом относительно невысокой стоимости. Плюсов очень много, из которых главные, на мой взгляд это задемпфированный «маслянистый» ход ручек, идеальная программная синхронизация двух ручек при соединении их защелкой и запредельные возможности софта, освоение и настройка которого можно выделить в отдельное хобби. Из минусов - у него наблюдается небольшое «залипание» ручек при долгом простое. А так же не всем понравился министик под большой палец и серая ось-крутилка внизу, на правой ручке. Но по соотношению цена/качество, я думаю, это лучший РУД или один из лучших. Нет даже мысли смотреть на что-то другое. Мини плюс, как и мини без плюса, не подходит для установки без крепления, он будет елозить по столу! Только Стандарт или Макс. Кроме того, по моим ощущениям, эргономически он наиболее удобен при установке пониже, ниже столешницы, на уровень бедра, как в настоящих кокпитах. У меня стоит на кронштейне, прикрепленном к самодельной усиленной полке под столешницей. Концепция компактного кокпита, когда ничего не торчит и столом можно пользоваться нормально))) Их нет, потому что первый завоз в РФ раскупили быстро, видимо.
-
Сейчас GFIV, был GFI. На ручке MCGU. В подписи. Софтверно dead zones нулевые.
-
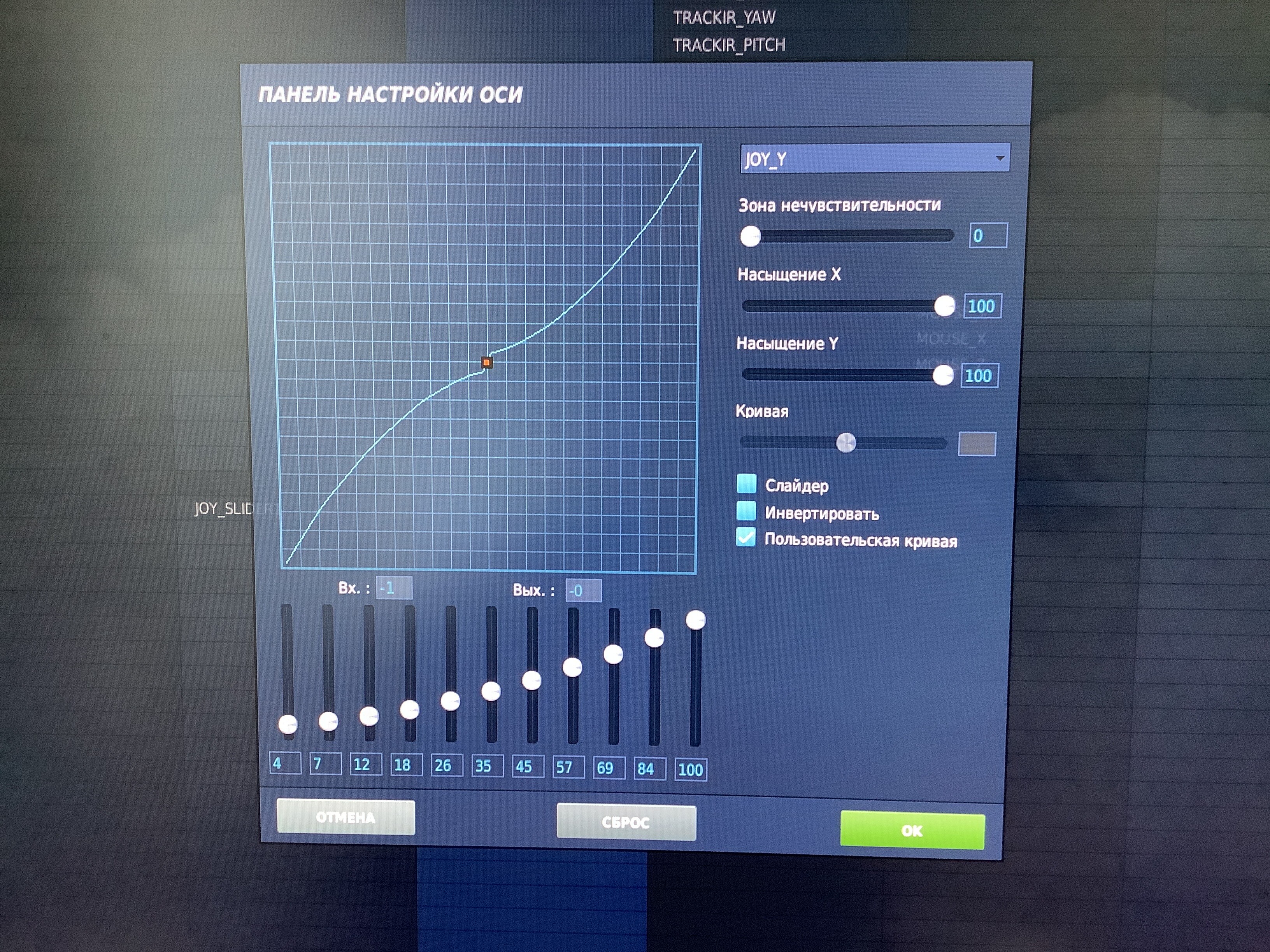
Только, чтобы не портить впечатления от ощущения на ручке этого самолёта, порекомендую пользовательскую кривую тангажа и крена, начинающуюся со значения 4 (дальше по вкусу). Это устранит мертвые зоны, которые непонятно зачем были заложены в самолет в одном из патчей больше года назад. Будет легче выполнять дозаправку, полет строем, выход в точку сброса бомб в CCRP.
-
У меня есть вся перечисленная троица. Вайпер попроще в освоении оборудования. При этом достаточно быстрый и маневренный (но не такой маневренный как F/A-18C и, возможно, не такой быстрый, как F-15E). Дозаправка в воздухе из всех трех немного легче остальных, относительно. У него самый развернутый набор борьбы с ПВО, для уничтожения ПВО. Он заточен под минимум нажатий кнопок, быстрых атак как в воздухе, так и на земле. Поэтому крепко держится в голове и подходит для нечастых коротких полетов выходного дня. Даталинк поинтереснее, на мой взгляд. Внешность я бы тоже на 1 место поставил из троицы, но это вскусовщина. Это всё интересные модули, но очередь заполучения в свой ангар я бы составил в виде 16, 18, 15Е. По поводы карты. Ну я не знаю что означает «карта под самолет». Поэтому берем самую большую, сбалансированную, симпатичную и с разнообразным рельефом, к тому же, имеющую обширную историю вооруженных конфликтов. В сети самые популярные карты это дефолтный Кавказ и Сирия. Афганистан должен выстрелить, но его нет пока.
-
16, Сирия
-
Проверьте это все с горячего старта