Inrideo
-
Posts
123 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Inrideo
-
If they could project the cost of having a dev work on building it natively for Linux and run a Kickstarter I'd contribute to that. That way they wouldn't have to put any money toward it unless it already paid for itself.
-
Since Betaflight recently added the ability to turn your flight controller into a USB HID device to relay control information from the transmitter to sims like Liftoff and Velocidrone, are there any quad pilots here who are using their transmitter in DCS? I just gave it a quick test with mine and found the cyclic to be fine but the collective to scale poorly, making the Mi8 pretty much impossible to fly, but it's still a good start and I can possibly tweak it to be usable. I'll have to look into mapping the switches too :) If anyone has tried, how's your experience so far?
-
I'm downloading the NTTR update over a very slow rural connection, and it sucks up the whole thing. Don't want to make the family unhappy for several days, so is there a config option to throttle the download speed? I could go the QoS route on the router, but I find it just slows down everything too.
-
Cool :) I still have the rubber dust cover from the T.Flight here somewhere to use. I think I may end up abandoning my other project, using the EDTracker as the joystick motion sensor. It works great up on the desk, but I think it's losing location accuracy when mounted on the floor. Maybe some neodymium magnets at floor level would give me a bigger field for the magnetometer to read.
-
I'll post the STL files online soon and you can just download them for free. If you know someone with a 3D printer you'll be good to go :) I didn't put a detente on it. I just wanted a nice, loose feeling stick. I'd add resistance (if needed) using shocks from an RC car. Maybe I'll add a coupler that slides up on to the conduit above the gimbal that can be locked into place and the shocks can attach to it.
-
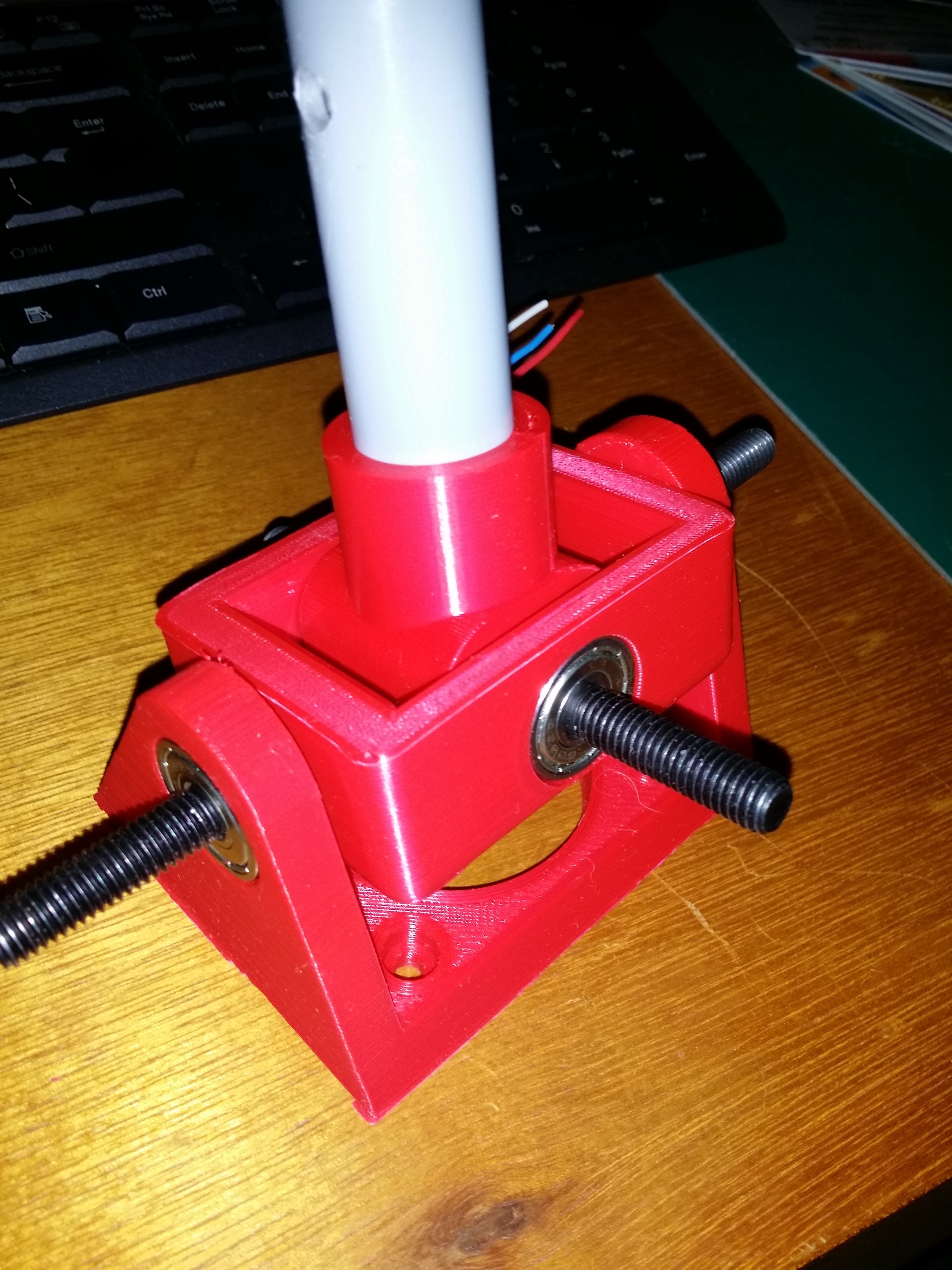
Closeup of the gimbal. It can be floor mounted. or put in a box and the main chassis inverted to bolt to the top of the box. There is a pass-through for the shaft to allow mounting both ways.

-
I was looking for a printed gimbal on various sites, and didn't find anything I really liked. Found something close on YouTube, and used it for inspiration. The result is a gimbal made for M3 bolts with circular heads, skate bearings, and eventually bolt caps that will house neodymium magnets for use with hall sensors.
-
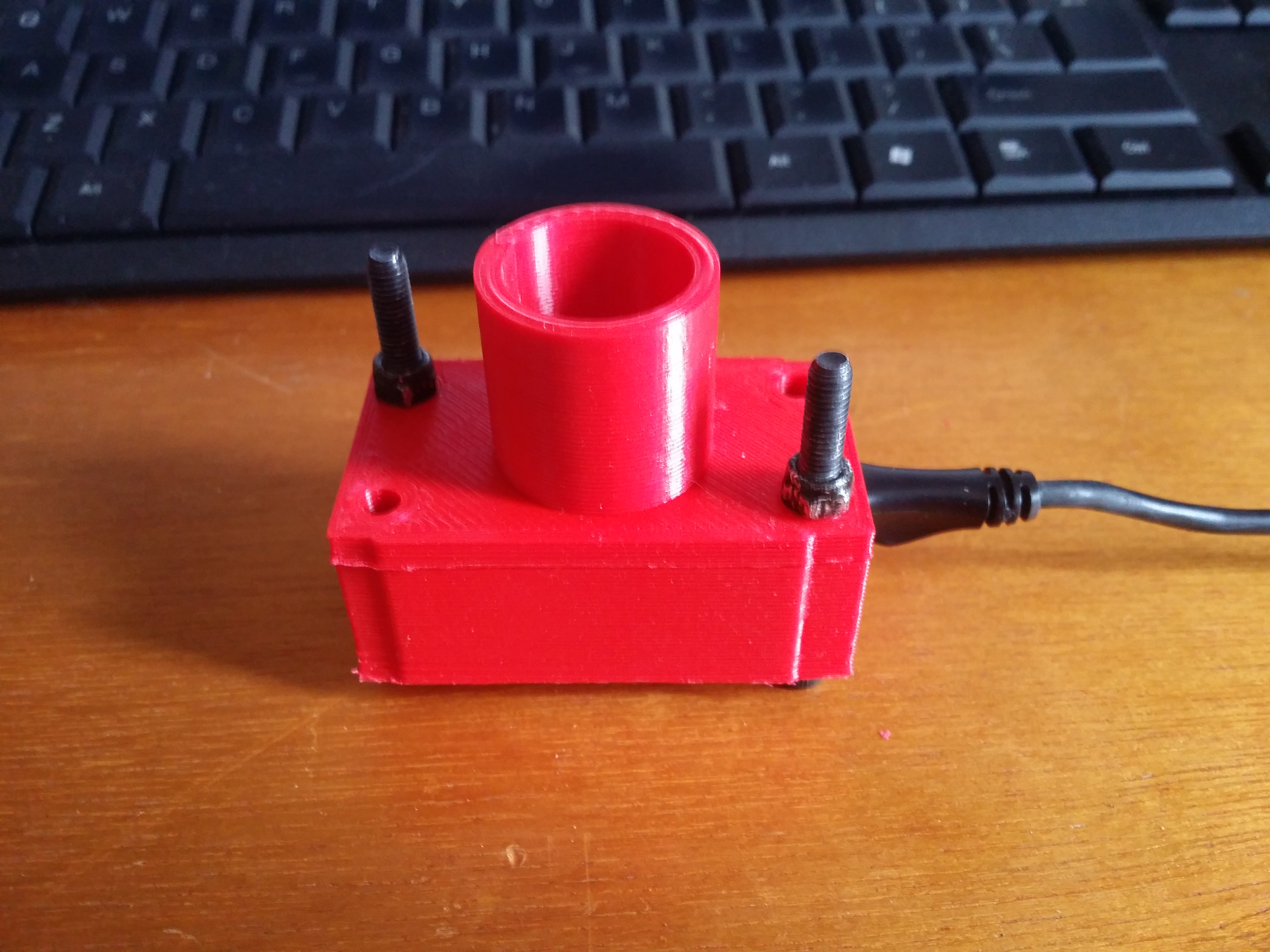
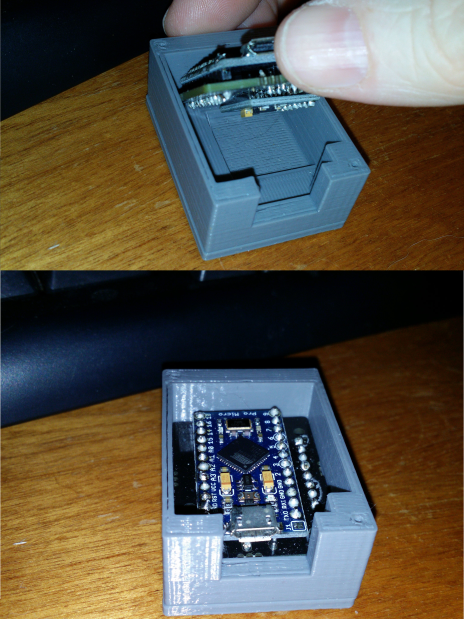
Been a long while since I worked on this due to printer issues and other stuff. Anyway, last night I finished up the box for the EDTracker to mount on the PVC Conduit cyclic shaft. I'll still need to make a harness for the wiring, but the movement should be good :) EDTracker in box pictured :)
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
I'm going to make better pedals now that I know it works. Was pretty sure it would considering the cyclic test went well before. A bit of PVC conduit and some doweling reinforce it and I should have a good set of pedals for a total cost of under 40 dollars, including the EDTracker. -
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
Just took it for a flight on the harbour tour :) Worked great! -
Wow. That's some awesome work :D
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
So there haven't been updates on the cyclic because the 3D printer was out of commission. I'm going to pick up one of those inexpensive Monoprice models next month though, so the cyclic project will continue. In the meantime I threw together a quick and dirty rudder using an EDTracker as the input. You still have to detach it and do the EDtracker Shuffle to get the magnetometer readings calibrated, but after that the rudder should work nicely. I turned pitch scaling down to zero on the EDTracker since there's no need for pitch at all, only Yaw. [ame] [/ame] -
I've seen some older threads on here and around the net about using tablets but the verdicts seemed to be lag and other issues. Has it improved any, or are there better solutions now? I'm using an Asus T100TA running Windows 10. Would something like Helios run on the tablet and interface with the cockpit controls? Cheers
-
Oooh, those keyboard maps are nice :D
-
Yeah. I had done alt-6 and was getting strange results, and since it does the route follow I used the plain 'A' as a test to see if going as-the-crow-flies would make a difference. And yup, I use alt-9 so my trim resets :)
-
So I've started the Su-25T lessons, and I'm seeing something weird about the autopilot and the flight director. They're more than happy to go in the wrong direction. And I don't mean that they'll correct to the intended flight path as designed. I tested it yesterday and my plane flew a few hundred kilometers before bingo fuel ended the trip. And it was flying directly away from the waypoint. For the test I just used 'A' rather than any of the alt + # versions. I don't see where I'm going wrong and have watched some youtube videos on it. Any tips? PS. It was very enlightening to find out about resetting the trim after coming out of an autopiloted maneuver. I'd found my joystick drifting the other day and couldn't find any conflicts in settings and that discovery fixed it right up :D
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
Printed version of the box. The EDTracker fits perfectly. The cover warped a little during printing so it didn't fit the shaft exactly. I might go into town later and print off a new one at the makerspace :)
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
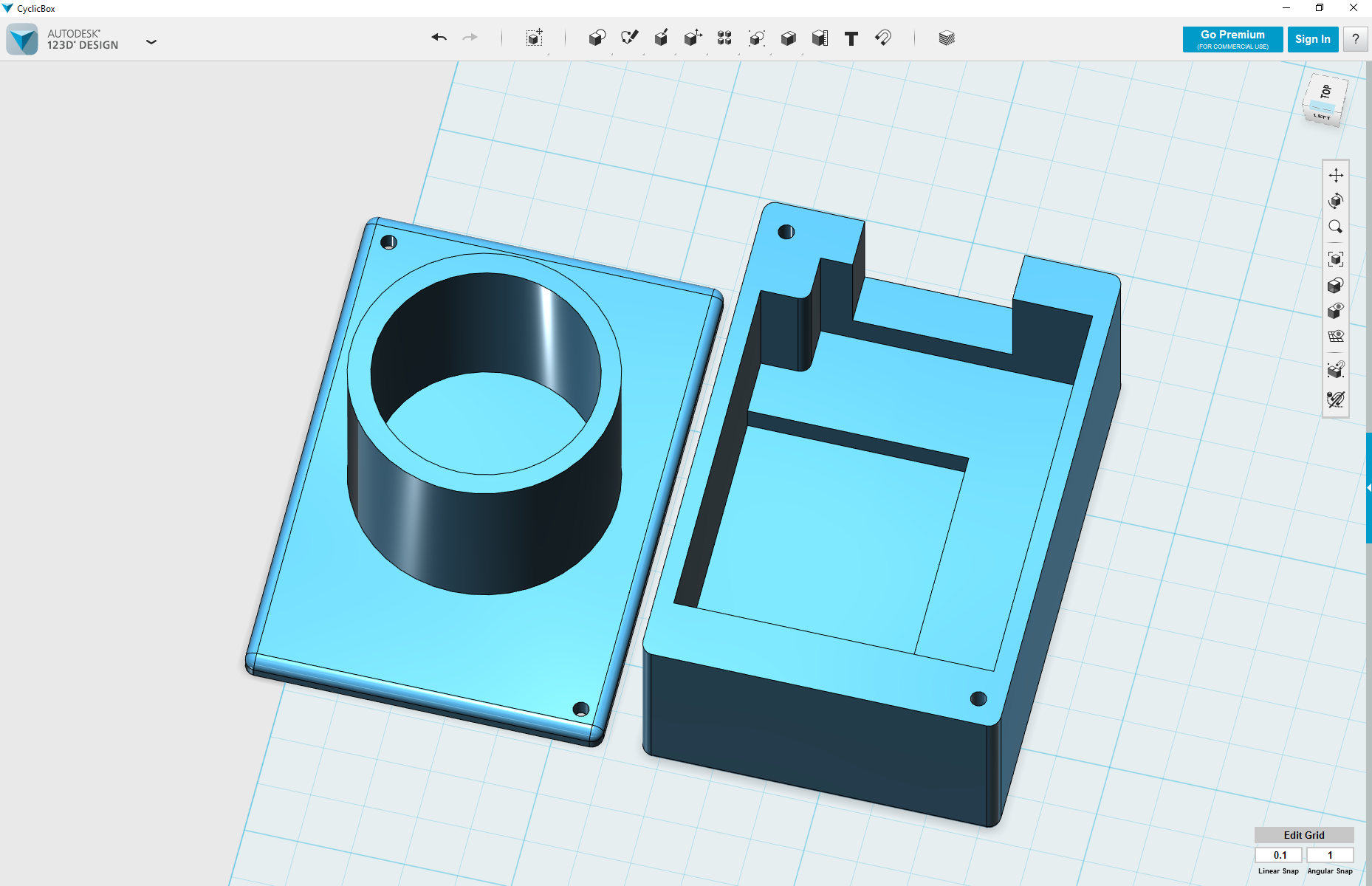
Just finished designing a new box for the EDTracker that will make it sit firmly in place on the end of the shaft. :)
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
That's a really good idea. Or some arduino controlled servos with a manual trim. :) This project can only get more fun :) -
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
Latest test flight in action: Some hovering and then cruising around. I need a better mounting solution for the EDTracker at the moment, since wires are in the way to run to the second arduino. But structurally I'm happy with the stick. [ame] [/ame] -
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
Just gave it a real test and it's a dream. Totally clean. Only issue you'll see in my TRK file is a lack of experience with the Huey. I'm definitely going to convert the collective and rudder to EDTracker now. :D DIYcyclic.trk
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
Oh, trust me. I'm not really all that handy. Making an EDTracker is simple because they've done a fantastic job of making it a beginner level soldering job. The arduino work to read the joystick buttons is also beginner level. You can do it with a Pro Micro or one of PJRC's awesome Teensy boards. Making the gimbal has been a bit of a challenge because all I have it a hand drill, but I didn't screw up too badly. Only had to toss a couple of pieces :) Using the guide for the $14 steadicam is perfect for that. So even though it might seem like advanced skills might be needed when you think about the final unit it's all just entry level stuff on different parts. :) And using basic tools. Screwdrivers, drill, wirecutters, dremel, and a saw. -
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
It works! It's way more responsive and natural feeling than the T-flight. I think it would also be perfect for the R44 training helis with the overhand cyclics, in FSX. I don't have the stick mounted on a base yet, but just ran it through a quick trial. The X and Z axes have to be swapped due to how the EDTracker handles them, but a trivial matter :) Next I will have to add another Arduino Pro Micro to handle the buttons from the stick. All the wires are mapped and were set up prior to this, so I just have to do it again. Quite happy with the progress :) With the way this works, I think I'll just buy two more EDTracker DIY kits and use them to modify my collective stick, and build a new rudder. It will minimize moving parts and add resolution to all axes.
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
Stick on gimbal :) Now I just need to put it on the big blue base, add the EDTracker, and give it a go :)
-
Using an EDTracker as a Cyclic
Inrideo replied to Inrideo's topic in PC Hardware and Related Software
Going to be working from this design. I don't have a drill press to ensure a clean 180 degree line, but the Makerspace opens this evening, and maybe they'll have one there. :)