
Beamscanner
-
Posts
925 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Posts posted by Beamscanner
-
-
Latest newsletter covering this was awesome!
-
 5
5
-
-
$200 + shipping
HP Reverb G1 in excellent condition with original box. All cables and both controllers come with it and work.
PM if interested.
-
2 hours ago, Маэстро said:
Maybe I'm wrong about F-15, but i know some red radars that work exactly as I have described - alternate 2-3 PRFs until detection occur and then froze PRF for range measurement.
Anyway it would be interesting to make some research on performance of both methods.HPRF FMR (HPRF RWS/TWS) 1 vs 2 PRFs
For this to work, a 3 stage FMR would be required for each PRF. Thus, you have the following options:
- 1 PRF / 3 FMRs = ToT/3 + Eclipsing loss (1-3 dB of loss)
- 2 PRFs / 6 FMRs = ToT/6
The math shows use that option 1 gives better range (even with the added 3 dB eclipsing loss) than option 2.
Thus, option is used because we double our integration time over option 2.
You are correct for VS mode (HPRF no FMR). It typically does use 2 PRFs to reduce eclipsing loss.
2 hours ago, Маэстро said:But that was the point. To lock average power in some bounds using transmitter input power. Energy conservation law is always there. System(GTWT) can not give more energy than it receive => average output power can not exceed consumed power. Otherwise it's a violation of the law of energy conservation.
I understand your considerations. But problem there is relatively high(to similar systems) average power. Taking into account low efficiency of TWTs we should expect about 20kW of input power in that case, most part of which will turn into heat(which in turn must be removed by powerful cooling system). Does not look typical.
IDK where you got your input power figures.
But as I said before, the hughes aircraft doc (F-15 Radar BIT) indicates that the GTWT output power check requires a minimum power of 1360 Watts and says that this represents the MPRF waveform (page 68 in that doc).
We know that MPRF duty cycle is typically 5 - 15%.
We can extrapolate the usable input power from this very easily.
Best Case (5% Duty Cycle):
Usable input power = 1360 * (1/.05)
Usable input power = 1360 * 20
Usable input power = 27200 Watts
This is unlikely.
Most probable Case (10% Duty Cycle):
Usable input power = 1360 * (1/.1)
Usable input power = 1360 * 10
Usable input power = 13600 Watts
This is likely.
Worst Case (15% Duty Cycle):
Usable input power = 1360 * (1/.15)
Usable input power = 1360 * 6.67
Usable input power = 9067 Watts
This is unlikely.
Even in the worst case scenario, the input power would need to be much higher than your statement: "From that I know, typical fighter radar has Pavg about 1-2kw."
Its very likely, based on multiple references that the APG-63 TWT peak power is ~13500 Watts.
I know that you're more concerned about the APG-73. But I dont have any figures on that.
Additionally, TWTs are cavity resonators. Meaning they build energy over time.
Resonance does not break the law of conservation of energy.
This video describes how a microwave oven, with an input of say 1000 Watts will generate internal powers of much higher strength.
TWTs are not microwave ovens, in that they do not contain standing waves like microwave ovens.
TWTs are however resonant cavities though, and do add up energy over time because they generate 'slow wave' oscillations where energy is continuously added up over time as that slow wave propagates down the tube. This occurs in a short period of time, and continues for the duration of a single pulse.
-
4
-
Attached is my recommendation for ED, as well as some of my excel sheets. I've put a lot into these sheets, so if anyone has any questions about the math please ask.
The main equation I think ED should use is the SNR equation. Its in both docs. My PPT explains the benefits of using it. I think ED should use Phase 2 to implement Pd detection (it also effects azimuth/bar settings like they previously mentioned, but not directly).
I think ED should hold off on look-down and altitude loss until Phase 3.
As usual, everything contained within is open-source / non-ITAR / never been classified at any level, ever. Its all just physics and theory from reputable sources.
Its mostly equations derived from:
Intro to air (George Stimson; all 3 editions)
Air and Spaceborne Radar Systems
Radar Handbook V2
I'm recommending resolution cells of:
-
MPRF
- Range: 150m
- Doppler: 10 Knots
-
HPRF
- Range: 4000m
- Doppler: 3 Knots
Be applied to all radars, when their true values are unknown. These values are generic and typical values one would see from a Pulse Doppler AA Radar. The point isn't to have a specific radars real values. The purpose is to:
- Show that these radars do not measure targets with perfect accuracy
- That MPRF and HPRF have pros and cons to resolution
- That targets within a res cell (must be within all 3 domains at same time; Beamwidth, Range AND Doppler) merge into 'one' large target/RCS.
EDIT: Fixed Gain sheet in excel. It was missing the formulas.
Beamscanner's Pd Detection recommendation.pptx
-
7
-
 2
2
-
MPRF
-
On 6/11/2023 at 8:39 AM, Маэстро said:
Yes, I have already read your paper, thanks. But Pavg seems to high to me. From that I know, typical fighter radar has Pavg about 1-2kw. Much of that is due to relatively low TWT efficiency(only 25-30%). For example from Introduction To Airborne Radar book we know that APG-73 transmitter input power is 4.5kw. Suppose electronics consume 500w and 4kw consumes TWT, than average output transmitter power is 4kw * 0.3 = 1.2kw.
It would be nice to have some info on APG-63 power consumption or alternative source to double-check transmitter peak power.No, I know what CPI is. BTW, assuming Tint = ToT/3 when 3 stage FMR used is not quite correct. We also should account for number of PRFs used to minimize eclipsing. If 2 PRFs are used, then we need 4 CPIs to guarantee successful ranging. If target eclipsed during first CPI it will be detected on second and 2 remaining CPIs will be used for ranging. If we have 3 PRFs then at least 5 CPIs per ToT are needed.
Unfortunately, I can not make our model public, but we can continue discussion to make things clear, and maybe combine our approaches.
For Pavg:
The CP-140 document indicates that the APG-63 GTWT amp has a peak power of ~12900 Watts. This seems correct for a GTWT amplifier built for high duty cycle. A public Tennessee.edu doc indicates that the GTWT amplifier from the APG-66 (built for low duty cycle, and high peak power) has an output power of 21000 Watts. A non controlled hughes aircraft doc (F-15 Radar BIT) indicates that the GTWT output power check requires a minimum power of 1360 Watts and says that this represents the MPRF waveform (page 68 in that doc). If we assume both the CP-140 doc and the F-15 Radar Bit doc are correct, this would indicate that the 1360 Watt (Pavg) figure is only the 10% duty cycle for the GTWT. This duty cycle is in fact typical for MPRF modes. In HPRF, the typical duty cycle is 30 - 50%. Thus I believe my estimated Pavg for high PRF of 5850 Watts to be accurate (13000 * 0.45 = 5850).
I think you are locked into input vs output power. The problem is that you are forgetting physics. Just like a microwave oven, energy is built up over time due to resonance within the cavity (or tube in the case of the GTWT). A 1000 Watt beam of 2.4GHz microwaves would not cook food in free space. But in a resonant cavity, that energy builds up over time can increase that internal power to tens of thousands of Watts. This is how a 1000 Watt microwave oven can actually cook food within.
HPRF FMR CPI:
I believe you're wrong. Many HPRF radars simply change PRF bar to bar. No need to guess though. The CPI time is exactly 8.6 milliseconds per FMR stage. This is described in the non-ITAR / Not controlled Hughes 'F-15 Radar Bit' document. Page 66 shows that there are 3 CPIs (a 4th stage exists at the beginning, but this is not processed and thus not a "CPI"), each CPI being 8.6 milliseconds long.
-
5
-
-
3 hours ago, Маэстро said:
Hi! First of all thanks for your feedback and SNR figures.
I should clarify things a bit because phrase about azimuth/bar settings caused a misleading.
This does not mean we are going to use cumulative detection probability in our radar model. This only means that we have plans to introdice realstic detection probabilitiy calculations based on SNR. Indeed, in general case azimuth/bar setting may affect detection range only because of more frequent sweeps.
BTW
Today will be published a new paper about our approach to APG-65/73 detection range estimation. It will be interesting to hear your thoughts on that. Perhaps this paper is a bit sketchy, but we still gathering information and refining our estimation.
First off, I really like the mathematical approach ED is taking. So kudos to you and the team.
2. My APG-63 analysis has the figures you were missing (Pavg, (S/N)req, and L).
Pavg is calculated from Ppeak (found in the CP-140 document) * duty cycle (Intro to airborne radar 1st edition mentions that the APG-63 in HPRF uses 1 range bin (ie 50% duty cycle; which I made 45% to account for receiver recovery time).
SNR was difficult, but I calculated everything you would need here. SNR is key to understanding Probability of detection. Scroll to the bottom of that excel I made, you will see a chart I made that shows SNR per mode for any given pulse doppler Air radar.
In my APG-63 analysis, you can see my losses chart. Using generic information from various radar sources I estimated about 10.5dB of losses in the APG-63 for HPRF. (ex radome losses are typically 0.5 dB per path, ie 1dB of loss to the radome in total)
3. Without seeing your full equation, the SNR and losses you chose, I cannot fully compare our two papers.
4. I suspect you may be using the full time on target (tot) in your equation. Keep in mind that in HPRF RWS/TWS, 3 stage FMR is used to range doppler targets. Thus the integration time for the equation is actually ToT/3. In MPRF, 7-9 PRFs may be used (radar dependent), in which case integration time would actually be ToT/8.
I look forward to continued discussion on this.
EDIT: I am willing to share my google sheets that I've built up over a year or so. However, I'd like to share it in a way so that each individual gets a copy without effecting someone else's copy (ie I don't want a single shared copy/link). If anyone knows google sheets, please PM me the correct way to do this.
Converting to excel disrupts my graphs.. I already tried that.
-
10
-
-
8 hours ago, DSplayer said:
How would something like the APG-68 and APG-73 fair with your analysis compared to the current Phase 1 radar changes?
Its much closer to reality in general performance. But I think the APG-68 RWS (ie MPRF) is still too high. I will do an analysis of my own on it since its figures exist to the public.
-
3
-
1
-
-
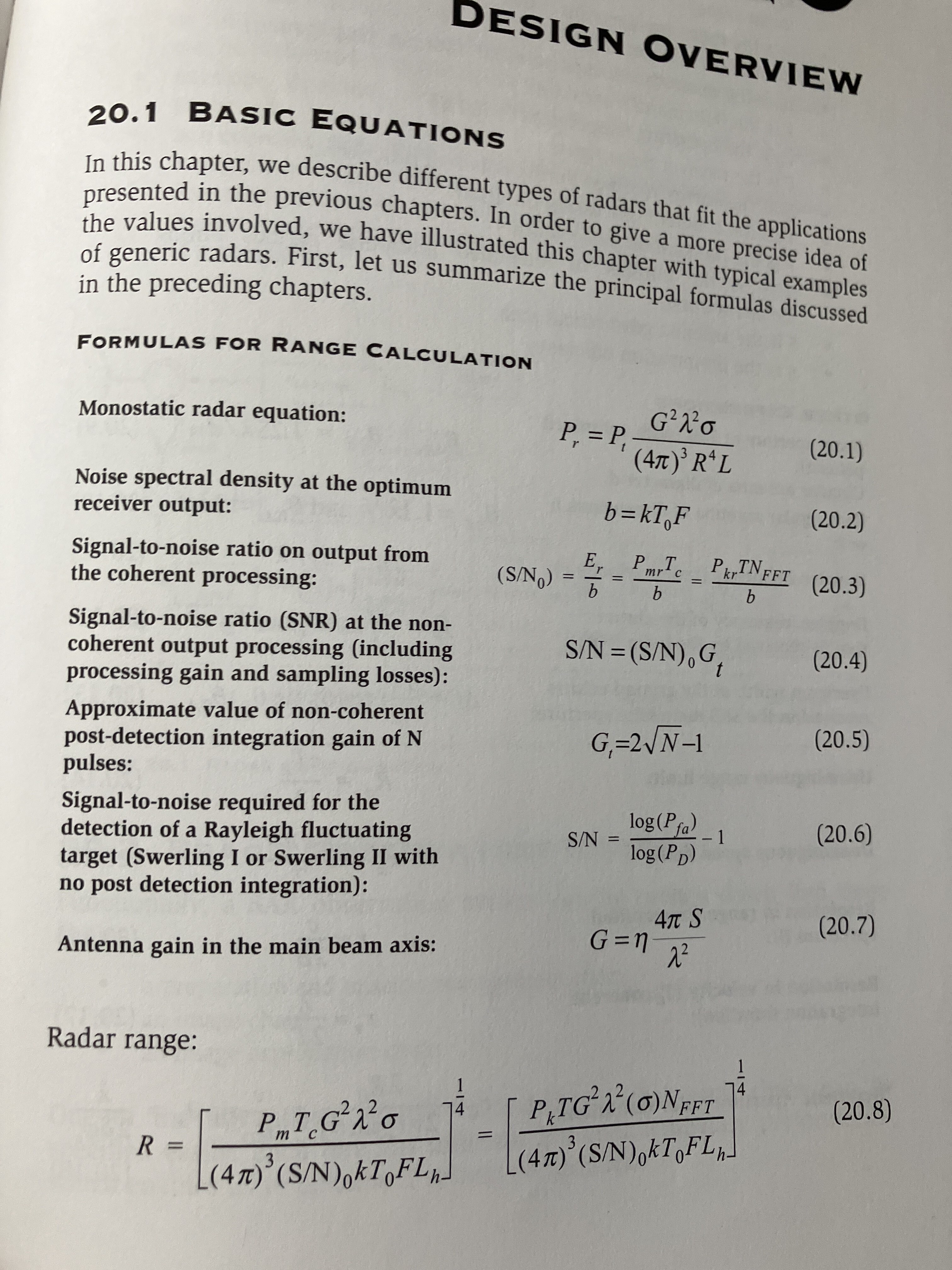
A mathematically gifted friend of mine found the reason for the extra 4pi.
(4pi)^2 is in relation to expansion of light spherically as I stated earlier.
The extra 4pi comes from effective area ("Ae"; not depicted in the formula).
You can see in the top that Gain is squared. In truth it would be Gain * Ae. Where Ae = (lamda^2/4pi)*Gain
Ae refers to the effective receiving area of the antenna aperture.
So the author altered the formula for simplicity sake.
-
7
-
-
On 6/7/2023 at 12:59 PM, funkyfranky said:
Thanks for the write up @Beamscanner. I'm trying to understand your max detection range equation and the values of the parameters you quote in the table.
What does not make sense to me is the area constant

You write 4π^3 but you the number you calculate (1984) is actually (4π)^3. That might be just missing parentheses but I still don't quite get where a factor of (4π)^3 comes from and why that should be an area? (I assume you take a sphere of radius = 1 m so the radius is not "visible" in the equation but still).
Yes, that was a typo. It is as you assumed. I meant to say (4pi)^3. The excel formula has it correct, its just the adjacent text that has the typo.
(4pi)^2 relates to the area of a sphere, in which the transmitted signal propagates outward and expands spherically.
I'm not sure how (4pi)^2 becomes (4pi)^3 in the radar range equation. Yes, this all assumes meters.
I will have to do some research on why it is cubed.
The source for this equation is depicted in equation (20.8):
-
6
-
-
The biggest difficulty besides finding the Noise Figure for a given radar, was figuring out the SNR for each Pd, per mode.
This is key to developing a single scan Pd for a radar.
To save ED the trouble, I'm attaching an excel spread sheet which contains the SNR figures for a swirling case 1 target (fluctuating air target), with a Probability of false alarm of 10^-6 (typical of modern fighter radars).
It calculates the SNR per mode given binomial distribution probability of "M of N detection logic".
Examples:
1. HPRF RWS uses 3 stage FMR for ranging (ie 3 separate coherent processing intervals or CPIs). "Single Burst" (ie single CPI) SNR for 50% Pd = 12.8dB. Given that all 3 CPIs need to detect the target (M of N = 3 of 3), if 12.8dB were used, a single scan Pd would result in a Pd of 12.5%, not 50%. (0.5 * 0.5 * 0.5 = 0.125)
Thus a higher "Single Burst" SNR is require to determine single scan Pd. In this case, a 17.6dB SNR gives about 80% Pd per CPI. given that this mode uses 3 CPIs AND requires target detection in all 3 CPIs, this 17.6 dB SNR results in a single scan SNR of 50%. (0.8 * 0.8 * 0.8 = 0.5)
2. MPRF logic is different. Typical M of N detection logic for MPRF is 3 of 8. That is a minimum of 3 detections given a total of 8 CPIs per time on target. What you will see is that because we get 8 chances to 'flip a coin' and we only need 'three chances to get heads' (where 'heads' = detection). The required SNR for a given Pd is less than HPRFs 3 of 3.
In truth though, MPRF can almost guarantee that 1 - 2 of its CPIs wont ever see the target due to range and doppler eclipsing. Various sources indicate that on average targets only exist in clear region 57 - 65 % of MPRF CPIs. I've simplified this logic by including a duty cycle input. For example if a MPRF using 8 CPIs has a duty of 15%, Ive made it so that the calculated Pd/SNR treats the M of N logic not as 3 of 8, but as 3 of * (8 * (1 - duty cycle) where duty cycle is indicative of probability of eclipsing. Thus the single scan probability of detection for 3 of 8 MPRF search mode would actually be 3 of 6.8.
Simply plug in your duty cycle and choose the mode of interest and use that SNR on the far left to determine the single scan Pd when applied to the radar range equation.
Edit: I've added the reference for Single Burst SNR (Swirling Case 1). Again, this is not the Single Scan SNR that SHOULD be used for actual detection. Single Scan SNR can be found in my attached excel.
-
16
-
-
ED has stated that Phase Two of their radar development will include azimuth/bar settings effecting detection performance.
"Upon Phase 1 release and tuning, we will implement Phase 2 that will include the effect of radar azimuth and bar settings on detection ranges and the inclusion of more accurate look down radar performance."
This is not a correct application of radar theory. The radar range equation does not contain azimuth or bar values in it.
Azimuth and bar settings only effect what is has been called Max Range Cumulative detection performance. Which indicates a typical range the radar will first see a target. See my full explanation here. But in short it is a simple way of telling a high ranking officer the typical range he could expect his first detection. Though this does not inform the officer that the detections will be rare/irregular at this range.
Azimuth and bar settings have little to no effect on performance. This is a misnomer told to pilots.
Detection range performance is based on a probability of detecting a RCS at a given range.
ex the APG-66 has a 10% chance of detecting a T-38 at 20 Nmi in a single sweep. (ie the main beam crossed the target once)
The benefit of lower ur bar and azimuth isn’t that this performance changes. Rather it’s that you get many more sweeps per second on the target. ie you get more chances to detect the target. Each sweep always being 10% (given the T-38 example).
Said another way, you simply get to roll the dice more often. But the average performance remains the same.
ED should instead use single scan probability of detection (not effected by azimuth/bar), rather than max cumulative.
For instance, given the APG-66 / T-38 example above.
Using single scan Pd, the T-38 would only be detected 1/10 sweeps at 20 Nmi. If ED used Max Cumulative, they'd simply make the detection 100% at 20 Nmi.
I've made a fully open source/non-ITAR analysis of the APG-63 detailing the math behind all of this.
ED should use the SNR figures provided to determine single scan Pd. Id recommend using a 0% Pd for anything lower than a 10% Pd, and a 100% Pd for anything above 95% Pd to simplify the code and because SNR figures get unreliable at these extremes.
Note that my math/analysis has been cross checked against the APG-66 as well, with estimates nearly match Westinghouse themselves https://i.imgur.com/cVZSyQf.jpg
Note that this graph is from IEEE, and has no government restrictions:
"F-16 Pulse Doppler Radar (AN/APG-66) Performance" IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. AES-19, NO. I JANUARY 1983
-
20
-
10
-
-
I just wanted to show off a mod to my throttle.
I added a potentiometer axis for antenna elevation (i imbedded a small secondary board into the unit for more axis/buttons) that I can switch between absolute value (F-16 Radar Elevation) or I can screw in a return to center on it for the F-18 and upcoming F-15E.
null
In total, my throttle modifications include:
- 2 new push buttons on the right throttle grip
- 2 new push buttons on the left throttle grip
-
1 new axis (antenna elevation)
- Optional return to center / absolute
- TM Warthog Slew mod
- Push through AB detent
I must say that the return to center axis using a potentiometer (with really tight rubber bands) feels really good. Well worth the work. Hopefully this helps out some of you looking for a good solution for the upcoming F-15E, while still having it work for the F-16.
-
2
-
On 4/1/2023 at 6:24 PM, F-2 said:
Apparently scan speed is comparable to a PESA, 10 degrees in 30 milliseconds according to this old AWST. The radar also has interleaving in some capacity.
FYI, most mechanical radars can scan faster than they do during normal operation. However, scanning faster lowers your detection range by reducing your time on target (less pulses get integrated).
I highly doubt the Captor-M actually scans at 333 degrees per second during RWS / TWS. Doing so would cut its detection range nearly in half.
The benefit of this high scan rate capability (and AESAs) is
1. Less time lost in changing elevation bars and resetting of the raster scan
2. less time rotating the antenna face when in STT and during an aircraft roll
3. Track file revisits (main benefit of PESA and AESA). Which probably doesn't exist in the Captor-M in any mode except DTT. And this would only be during the motion between the targets. While on the targets (if performing a mini-raster) it would slow down again.
-
2
-
-
Game on Heatblur!
-
6
-
-
On 2/1/2023 at 10:32 PM, Shrike88 said:
would like to hear @Beamscanner on this new topic and tones. Always very knowledgeable on the subject.
These synthetic tones are great. (and more importantly, true to the system)
They intentionally leave a lot of empty audio so that the PRF audio can come through when handoff is selected.
Once Handoff/PRF audio comes, it'll all kinda make sense.
For instance, the PRF of a lock-on will be constant.
Also, I'll be releasing my own PRF library mod to replace whatever ED comes up with.
-
8
-
-
- Helos typically fly at speeds inside the main beam clutter notch filter (<~100 knots)
- Helo detection is thus primary achieved via the rotor blades, due to their doppler shift.
-
The best reflector on a helo is its tail rotor.
- its RCS is higher than the main blades when a vertical polarization is used (ie Fighter Radars). The main blades have a higher RCS when a horizontal polarization is used (ie some ground based Radars) (Reference)
- It also spins faster than the main blades and thus its doppler shift is more likely to sit in the clutter free doppler spectrum (or closer to it where the sidelobe clutter is weak)
-
Thus, the best detection aspect is from behind the helo (clear LOS on tail blade; tail blade has high relative velocity from this aspect, thus good doppler)
- (simulation of Helo RCS, though the authors unfortunately did not mention the polarization used. Ignore the RCS reduction techniques modeled and look at their default RCS. Keep in mind that this paper is on RCS in general (ie including ground radars) not RCS against a fighter (primary detecting doppler).
- From the front aspect, you have no LOS on the tail rotor.
- From the side aspect, you have LOS on the tail (thus high vertical pol. RCS), but the doppler shift is not significant bc the relative velocity from this angle is minimal.
- While it may seem as though the blades have a very small RCS (they do), they also scatter their doppler shifted RF across the helo's fuselage which in turn scatters some of this RF back to the radar. (ie multipath effects between the rotors and fuselage significantly increase the RCS of the helo).
-
3
-
1
-
21 hours ago, F-2 said:
I’ve actually been dying to know if the proposed APG-73 AESA upgrade was related to apg-79. Thank you!
do you have any information on what APG-73 AESA would have entailed?
All I know is that the -73 upgrade was sold to the DoD as a future proof radar electronics upgrade. Keep in mind, in the early 1990s AESAs were the talk of the radar community. DoD was not keen on paying for an upgrade that wasn't an AESA. Hughes, Westinghouse and Texas Instruments were all fighting for the Advanced Tactical Fighter (ATF) radar contract around that time. TI won the contract for the GaA antenna array, and Westinghouse won the contract for the radar electronics in the ATF. Hughes had been dealt a huge blow. (ironic considering the blow they had given to Westinghouse in the bid for the F-15 radar decades before)
My speculation is that upon losing the ATF bid, Hughes/Raytheon went to work to find an easier/quick solution to get an AESA contract. The solution being: Make the AESA an add-on to an already proven radar. They looked at their own APG-63v1 and built an array that could be swapped out with the planar waveguide antenna with minimal change to the back end hardware.
Hughes/Raytheon was able to frog leap Westinghouse and TI doing this and released the first operation AESA radar, the APG-63v2. Though this could of been due to the delay of the F-22 and not the APG-77 itself.
I imagine they thought they could do something similar with the APG-73 (their Navy baby).
Keep in mind this all gets more confusing as Hughes and TI radar are absorbed into Raytheon, and Northup Grumman absorbs Westinghouse.
-
1
-
-
This is about a month old, but interesting info from RAZBAM's discord, and not yet posted here.
A/A Radar detecting civilian traffic while operating in MPRF with a "LO GMTR" setting. (Pilot selected, smaller doppler notch filter I believe..?)
null
-
7
-
-
Fun fact, the APG-73 was given a lot more processing (and room for more processor cards) than needed in order to support a future swap to an AESA that would replace the APG-65 planer slotted waveguide array that was still utilized by the APG-73. (ie the AESA upgrade would only swap out the antenna and still use the radar processing from the APG-73)
Though the Navy never did upgrade the F/A-18Cs with a 'front-end' AESA. Instead, the Super Hornets got the fully kitted APG-79 AESA.
-
3
-
-
2 hours ago, Rainmaker said:
- Fewer TWS displayed track files seen by the pilot vs the eagle
120 degree LTWS > 60 degree TWS with more clutter on screen.
And while the APG-73 tracks less targets in total, it constantly creates trackfiles even in RWS. They're just hidden from the pilot. This is different from the APG-70, which does not do this in RWS. This allows immediate tracking when switching modes.
2 hours ago, Rainmaker said:- Still a narrower beam width scan for actual target detection in both AA and AG. That isn't even bringing 'range' into account here.
2 hours ago, Rainmaker said:Unless the radar is your only category for 'more modern', then no. In terms of the radar, lets not forget the original antenna, a smaller ECS package to cool the 'newer' transmitter, smaller main generators to power all of it, etc. Exactly why I said size matters in one of my posts above.
No one here, including me, has said the Hornet outperformed the Eagle. A larger antenna ensures much higher gain. This is a strawman.
2 hours ago, Rainmaker said:Don't assume that MSI means 'more modern' than something else. The eagle integrates a lot of things just fine. MSI is nothing more than a hornet buzzword, and you are assuming that the hornet does things that the eagle does not since it doesn't use the term MSI, even if it's the same things done differently. So no. As for the track files, see above. This is exactly why I asked you about the eagle in my previous post. The eagle processes/displays more to the pilot. Computational capacity (okay, I'll give you that for the radar). Unless you know what the rest of the avionics package in an eagle looks like, then no. Integrated Radar/RWR. Unless you are just doubling up on your MSI thing, and repeating that to boost examples even though they are the same thing, they are all integrated. They have to be, as well as with many other systems on the jet. Even considering MSI, again, unless you know that to be an equipment limitation, and you know exactly what the eagle can/can't do, speculation that it's 'more modern' isn't true. What exact capes are there is not really for discussion here, other than to say your thoughts are wrong. Fully digitized aircraft. Again, no. I've already pointed out why that isn't the case. All systems BIT? We can go down that road again if you want to? And if you look at DTOE reports, the hornet's radar BIT system has been less than stellar on accuracy. And there are systems that do not BIT, if you wanna get really into it. But again, the eagle has done all that and then some for a long time now. Has plenty of BIT types, continuous and user/situation initiated, yada yada. We can however start comparing systems if you want to? So yes, you have a lot of that incorrect.
MSI is not a buzzword. It is capable of a lot.. That doesn't mean that the Strike Eagle doesn't do alot as well.
RWR integration in the eagle is mainly for blanking and preventing interference between Radar, Jammer and RWR. It does not integrate RWR data like the Hornet.
You're clearly locked in your view, probably due to your bias for the jet you turn wrenches on. You don't know much about the Hornet, and when you're proved wrong (see my previous 2 posts) you move the goal post (now its performance, BIT, and 'nothing is fully digital' again').
BTW.. your analogy doesn't work. we do know what's in them, we know how fast they are, we know how much memory they have, we know they were both built by the same company, and they were both expected to be best in class.
-
6
-
-
13 hours ago, Rainmaker said:
LOL. If you look back. I never said either aircraft was ‘more modern’. That’s the point here. You did. And yet, it’s very apparent you dont have any actual experience with either aircraft (certainly not a -15) so you actually don’t know any more than any of the other ‘armchair experts’ that you attempt to try and elevate yourself above. That’s also my point. If you haven't been there or done that, don't try to put yourself on a pedestal.
Here’s a few other trivia questions for you. Ones I would expect you to know if you are going to compare the two. What’s the memory capacity and speed of the -610 and -111 in an APG-70? How many tracks are processed and displayed on a -15E’s scope? I’ll wait.
You have yet to explain why my "data is wrong on many accounts in this post."
All you can do is say 'I've touched the thing and you haven't' even though you know nothing about me. All of us know you did maintenance on the thing. That doesn't invalidate our argument.
The APG-73 radar has:
- a Combined Radar data and Signal processor with a throughput of 60MOPS (8.3 x that of the APG-65)
- 11-bit, 5 MHz ADC for A/A
- 6-bit, 58-MHz ADC for A/G
- A secondary computer that handles mode control, antenna control, target tracking, and display processing has 2 MOPS and 2M-word firm memory and a 256K 16-bit working memory.
The APG-70 radar has:
- A programmable signal processor with a throughput of 34 MOPS
- A Radar data processor with a throughput of 1.4 MOPS (3x the APG-63's IBM CP-1075's 400 KOPS) with 1M of memory.
APG-73's 60 MOPS > APG-70's 34 MOPS
The APG-73's secondary computer (not even a radar or signal data computer) has 2x memory and 40% more processing than the Radar data processor in the F-15E.
Reference below / attached. (all references are public domain / non-government)
-
6
-
3 hours ago, Rainmaker said:
You brought that into the discussion. I know what it means, and what it does, which is why I understand when it has context or just a buzz word being thrown out there.
For the 'digital comment'. I don't think you quite understand how these system actually work in an actual component, on a jet, and communicate with one another, in the real-world sense. Your 'classification' of digital is not going to meet what actually makes something analog-less. I don't live in a brochure world...if I did...the military wouldn't have needed to train me on how to troubleshoot and fix things that the brochure said it would all do itself. And not a single system that I have ever worked, even if the boxes ended in the word computer, was ever all digital. Even on Gen 5 or Gen 6....they are likely not to be all digital.....and certainly not gen 4...don't care which aircraft you are talking about.
On the subject of computational capacity....You know this to be fact? You entire mindset seems to be centered around the RADAR. So we are only talking about the radar now that makes it more modern? That's one system....out of like 100...and has it's own computers....which shares some of the same stuff as the original -70 if we talk about the -73. It's not even close if you wanna talk the previous editions. So, now we are talking roughly equal to but certainly not greater than. What about the others? What about the display processor? What about the mission computer? Weapons system computer? Pilot interface computers? Jamming suite? Ability to actually use all those systems at once? If you are basing your comments of being more modern solely on nothing but the RADAR...then I dunno what to tell you other than you are being very biased on something that you have some theory knowledge on...and leaving out about 100 other things that wind up making the end result. I dont care if the radar can track 1000 targets...if it doesn't get to the display...and the pilot can't make use of it....then it matters none. The radar isn't what makes all that magic happen in the cockpit.
I see a lot of 'what-about-ism'.
It seems you are trying to sell yourself rather than the F-15E. Otherwise you would provide details on why you believe, through your tactical maintenance experience, the F-15E is (in general) more modern than the F/A-18C.
Most of the the systems you mentioned are still superior on the Hornet.
- The tri-color displays?
- The 2 mission computers that fuse data from 5 simultaneous sensors?
- Weapon systems computer? Well it works in both jets... But the Hornet can employ more varied weapon types.
- Pilot interface? You mean like Fly-By-Wire, ACLS, Auto throttle, Spin recovery?
- Jamming suite? Smaller RCS wins in the SPJ category (not that DCS cares).
- I'm pretty sure both jets can use most of their systems at once.
I dont need to stop at the radar, either. I believe the RWR is the same dated one from the F-15C. The F/A-18C's ALR-67(v2) is certainly more modern. Integrated with Jammer, HARM, Radar, INS.
Stop making this about you. Provide some bullet points as to why you believe the F-15E has more modern avionics than the F/A-18C.
-
5
-
25 minutes ago, Rainmaker said:
Well, I know when you use buzz words like more 'computational capacity'....and throw in ones like 'fully digitized' and 'all systems BIT'. I actually understand what that means when it comes to being in an actual aircraft.
Which BIT types you wanna discuss?
F BITS
G BITS
C BITS
M BITS
P BITS
I can name more if you want....
The eagle has that and more....had them since....forever.
More modern? Are you familiar with what the eagle has in it? Just because it was built before....doesn't mean anything. Unless you know what specific systems are in the jet, saying one has more 'computational capacity' doesnt mean anything.
I dont think the number of BIT categories is an indication of avionic superiority. But we do know that that the F/A-18 was built around being entirely digital.
Yes, I am.. By computational capacity I mean it has more RAM, performs larger and faster FFTs, and can track more targets.
Saying that one is more modern, is not the same as saying the F-15E isn't modern.
-
2
-
-
On 11/21/2022 at 1:07 AM, Bananabrai said:
So this is about the threat ring logic only? Or is there something else?
Because for me, the Harrier's RWR also seems to be too precise, which is more disturbing for me, than the incorrect threat ring logic on the Hornet.I have no doubt that every RWR in DCS (bar the F-14s) is way too accurate. I was only referring to the threat logic.
On 11/21/2022 at 5:37 PM, Rainmaker said:Your data is wrong on many accounts in this post.
Excellent rebuttal!
-
4
-









{kind=link}
DLSS, DLAA, thanks but going back to MSAA
in Virtual Reality
Posted
DLSS is really bad with MFDs...