Econ
-
Posts
513 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Econ
-
Я печать заказывал максимально качественную, из пяти хаток 3 собрались сразу, 2 пришлось пару раз провести надфилем для подгонки. Кнопки встали во все сразу хорошо. Но это посоветовали мастера, ранее по объявкам заказывал - там слои видны сильно и вообще внешний вид после печати не ахти.
-
https://www.thingiverse.com/thing:3641494 собирается как конструктор.
-
https://sites.google.com/site/diyheadtracking/home
-
Там не на готовой платке все сделано, он чип на свой шильдик с выходами распаивает. Вот такое, как я понял: https://github.com/FreeJoy-Team/Controller-Lite
-
Спасибо, увидел.
-
-
Pilot27 решил не забирать шильдик. Могу отправить, адрес в личку скиньте. Если нужен, конечно.
-
Для промикро остался вот такой шильдик на 8 осей 16 кнопок (добавлять можно до сотни кнопок сдвиговыми). Вы где территориально?

-
А сколько кнопок планируется?
-
Да. Я еще руд делал для Warthog, так что кнопок нужно было много подключать.
-
Я себе вот такое делал
-
Вот тут прграммировать не нужно ничего: https://github.com/FreeJoy-Team/FreeJoyWiki
-
Странно, у меня ручка вирпилов разбирается откручиванием винтиков, ничего не приклеено. Ну и за вирпилов плюс скажу, что ручки можно "на лету" сменить, ничего не раскручивая.я кота и их ручку часто меняю, из положения сайдстик в подстульник. А вообще кота надо брать, с заменой механики на железо. Божественная же вещь
-
У меня база вирпилов с коротким ходом - прекрасно работает как в подстульном варианте с удлинителями, так и как сайдстик справа. Две ручки - одна вирпиловская самая первая и от кота - меняется просто открутить одну, прикрутить другую. Судя по видео о вкб next, демпферы правильно только в нем заработали.
-
А еще в некоторых играх после релиза почему-то в первых патчах вырубают поддержку трекира и фритрека. Решается или играть с беты, или заменить savegame.sav на старый, но весь прогресс и настройки сбросятся. Фритрек запустится, но с трекиром нужно будет еще плясать. сохраненка тут : https://steamah.com/go/?url=https://drive.google.com/file/d/1pHT0qxPHYUozHQ62WGG-48rKMW44-wsq/view?usp=sharing закидывать с заменой в “%localappdata%\ProjectWingman\Saved\SaveGames”. Версия GOG, 1,0,3 В джойстиках используется только процентов 20 полного хода, чуть двинул ручку в игре уже край.
-
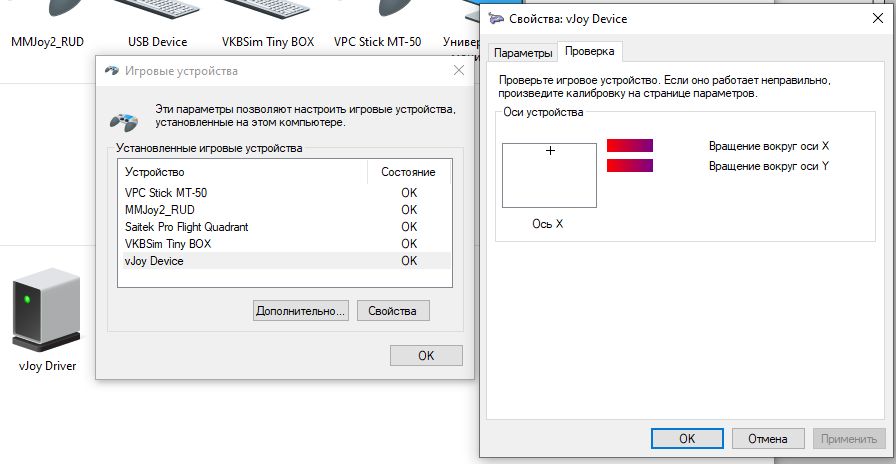
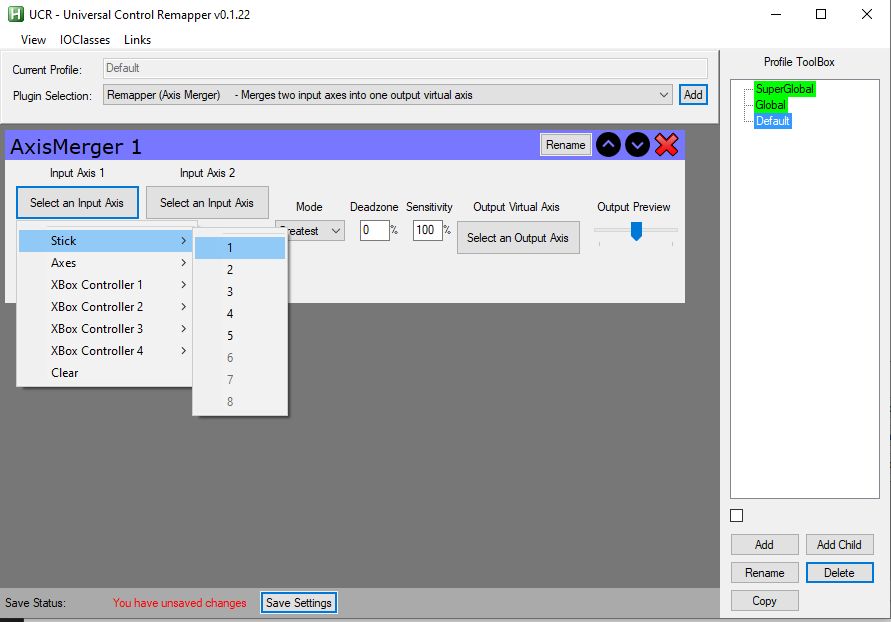
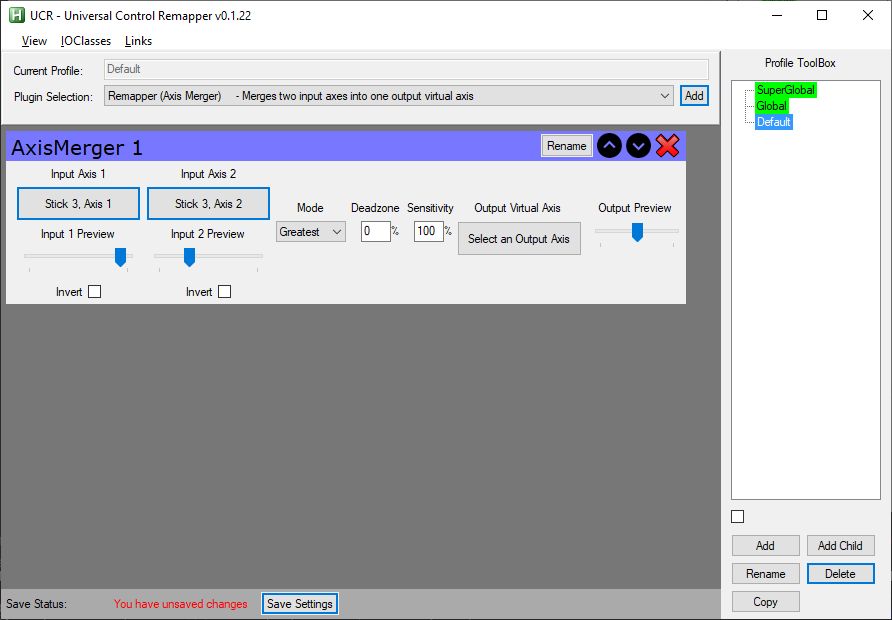
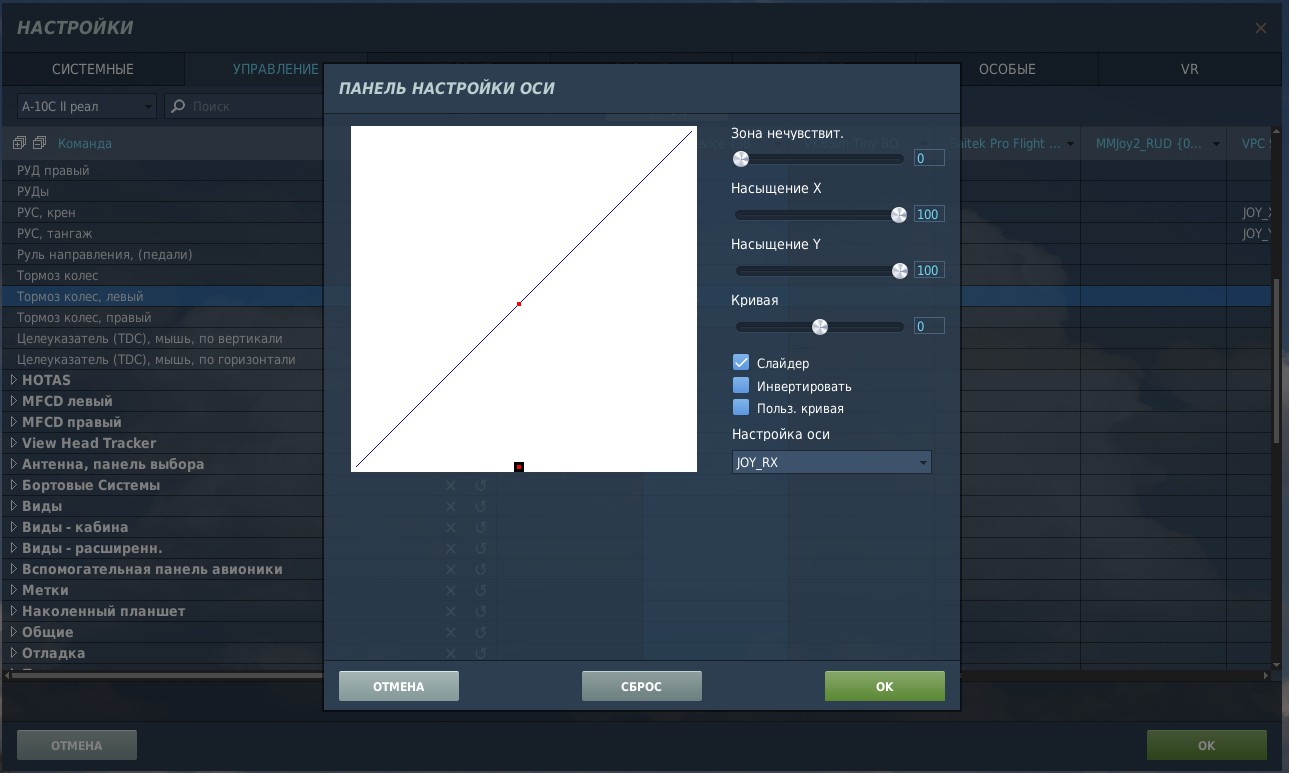
Можно. Там каждая педаль - отдельная ось? Настройка автопедалей под авиа (если каждая ось педалей - отдельная) В софте руля, если вкл., отключить объединение осей. Скачиваем и устанавливаем vJoy: https://sourceforge.net/projects/vjoystick/ Скачиваем и распаковываем туда, где оно будет жить постоянно UCR: https://github.com/evilC/UCR/releases Запускаем Configure vJoy (в меню ПУСК) и настраиваем виртуальный джойстик (я оставил только 3 оси, все кнопки/хатки/эффекты убрал): В системе появился виртуальный трехосевой джойстик: Запускаем UCR, в Plugin Selection выбираем Remapper (Axis Merger), жмем Add. Теперь нужно найти, какому номеру джойстика соответствуют наше рулепедали (я делаю методом перебора). Под Input Axes 1 жмем Select an input axes, выбираем Stick 1: Еще раз клацаем ту же кнопку, теперь выбираем Axis 1: Теперь жмем все педали, КРУТИМ РУЛЬ, короче, все имеющиеся на устройстве оси. Смотрим на отклик ползунка в Input preview 1: Если отклика нет, то выбираем Stick 2, Axes 1 и опять крутим до результата. У меня нашлось на Stick 3: Отклик может быть не от педали, а от руля. Так что теперь, не трогая Stick меняем Axis (Axis1, Axis2...) пока ползунок не будет двигаться от нужной педали (в нашем случае для левой ноги). У меня руль - 3 оси, левая педаль - X, правая - Y, рулевое колесо - Z. Левая педаль срабатывает на Stick 3, Axis 1. Номер джойстика известен, теперь настраиваем правую педаль. С Input axes 2 проделываем все то же самое, пока не найдем нужную педаль (Stick оставляем, меняем только axes). У меня stick 3 Axis 2: Оси педалей настроены, теперь назначим их на ось виртуального джойстика. В Output Virtual Axis выбираем vJoy stick 1, Axis 1 и смотрим, как нажатия педалей передаются на виртуальную ось. При даче левой ноги ползунок в Output preview должен отклоняться полностью влево, при правой - вправо. при отпускании возвращаться в центр. Если работает не так, то нужно отметить галочками Invert под какой либо осью педалей. У меня под Input axis 1: В принципе на этом можно было остановиться. Можно было сделать одноосевой виртуальный джойстик, сделать это объединение осей, в ДКС руль направления назначить от VJoy, раздельные тормоза выбрать в колонке с нашим рулем. Но красивее выглядит, если и направление, и тормоза на одном устройстве, да и в дальнейшем можно не останавливаться, а сделать смену профилей по кнопке чтобы работал только хвост, только колесные или же все вместе. Или если в каком-то симе\самолете тормоза на кнопке, то можно га часть оси назначить ее и оттормаживаться педалькой, нажимая виртуальную кнопочку. Так что продолжим. Теперь назначим соответствие осей педалей осям раздельных тормозов. В Plugin selector выбираем Remapper (Axis to Axis), жмем add, в input axis выбираем уже известную нам левую педаль, в Output virtual Axis выбираем vJoy stick 1, Axis 4 (Rx). Для правой педали почти то же самое: В Plugin selector выбираем Remapper (Axis to Axis), жмем add, в input axis выбираем уже известную нам правую педаль, в Output virtual Axis выбираем vJoy stick 1, Axis 5 (Ry). Все оси почти настроены: Теперь для оси руля направления изменим режим, чтобы ось не скакала в крайние положения, если мы в полете зажмем обе педали сразу. В AxisMerger1 режим Mode меняем с Greatest на Average: Собственно, все. Жмем внизу Save settings, перезапускаем UCR на всякий и сворачиваем в трей. Запускаем DCS, идем в нужный нам самолет и настраиваем: Колесные тормоза отмечаем как слайдеры: Теперь у нас одновременно работают и руль направления, и раздельные колесные тормоза. В воздухе будет только хвост, на земле при рулежке все вместе. При посадке - оттормаживаться , дозируя усилия на тормозах, хвост будет пропорционально доворачивать в сторону наиболее сильно зажатого тормоза Если усилие одинаковое, хвост по центру):
-
Ну можно сделать меньше, чем авто. Карманный вариант (газлифты выбросить и заменить пружиной) ))
-
Ставим программу vJoy - в системе появится виртуальный джойстик. Через программу UCR будем передавать данные с ваших педалей на виртуальный джойстик, который и будет назначаться в игре. Делаем 2 профиля - в первом объединяем 2 отдельные оси ваших педалей в одну ось виртуального джоя. Во втором профиле каждую ось педалей вешаем на отдельную ось виртуального джоя. Назначаем любую удобную кнопку на переключение профилей. Теперь при нажатии кнопки переключаемся на первый профиль - там нажатиями педалей будете рулить хвостом. При повторном нажатии кнопки и переключении профиля нажатия педалей будут рулить колесными тормозами, для рулежки, например. Еще есть вариант с одним профилем - там нажатия педалей будут рулить одновременно и хвостом, и колесными тормозами. Вы как определитесь с педальками, я могу картинками скинуть настройки. Просто может и не понадобятся вообще. Ну и желательно чтобы усилия на педалях было одинаковое. А почему автопедали? Можно же чуть ли не дендрофекальным методом занедорого сваять себе достойные металлические.
-
У logitech в софте можно объединить педали в одну ось. vJoy + UCR поможет с любыми другими 2-х осными (можно будет еще и трехосевыми их сделать).
-
Внутри корпуса - термоклей. К наушникам двухсторонний скотч 3M. Теперь так (и датчик, и nano на наушниках, чтобы провод можно было отсоединять при необходимости). Крепление - черная изолента и тот же скотч. При желании высоту корпусов можно уменьшить. Был вариант на dfrobot beetle + 9250:
-
Корпуса РЭА, промикро и гу85, шнурки от китайских затычек. (Теперь бутерброд из 6050+273 и нано, корпуса рэа чуть побольше)
-
-
Делают такое: https://a360.co/3i6zb9h
-
Можно добавлять ботов себе в команду и цену планируют увеличить в 3 раза.
-
https://github.com/JonahTsai/F16/tree/master/Throttle