312_Lobo
-
Posts
35 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by 312_Lobo
-

stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
I'm not saying anything against 32 kgf limit. As for the behavior. Ok, then it's explained. I thought that limit is a "hard stop" beyond which there is no movement of virtual stick at all. If player can overcome 32 kgf "soft stop" at the cost of control accuracy it probably explains the "rubber stick" feeling at high speeds in 109. I'm wondering if giving a player an option to disable filtered/inacurate "I want to live!" range and having just direct linkage zone up to 32 kgf "hard stop" would improve the user experience for those who want to get rid of "rubber stick" feeling ... Probably silly idea, who would willingly limit control range of own plane :). Anyway, for me -- case closed. Thank you for your explanation, time and patience :). -
stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
As I understand it, and maybe I'm wrong, if there was still "direct linkage" modeled between joystick and virtual stick deflection, then with cutting force limit at some point the red indicator should reach that limit and stop moving before players joystick reach max deflection. This is what I understand by "cutting". Is that right? It's difficult to do for pitch because in order to get apparent or easy to interpret video. I need to keep the speed at the constant value where limit isn't too close to the neutral position (so that we can see the indicator) and at the same time I have to pull slowly the stick to extreme position without over-stressing the airframe or getting into stall. So if you don't mind I'll try to demonstrate my point on roll. https://www.youtube.com/watch?v=79RoTkxvTwg&feature=youtu.be If my understanding what CUTTING means here is correct, I would expect that red indicator movement stops at limit before I reach full deflection of my joystick. It is not happening in my opinion. All I'm questioning is the way how joystick movement transfers to virtual stick movement at high speeds. At least I believe it's always been in DCS that way, that as long as you were using linear input 50% deflection of player joystick resulted in 50% deflection of virtual sick in game (without limits). This seems to no longer be true above speeds where cutting force limit kicks in. Now player have to move joystick all the way to reach that limit, which leads to stick yanking at high speeds. For me this is not natural, at least that's my RL experience, that with increasing speed you dont need more stick deflection to get the same effect you just need more force to move the stick to that deflection but the effect is more or less same. -
stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
Ok, here you go, with decelerated time in game. https://www.youtube.com/watch?v=-aquUv7HU7g&feature=youtu.be I really cannot help myself but I still see that red indicator does not stop moving until full joystick deflection. -
stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
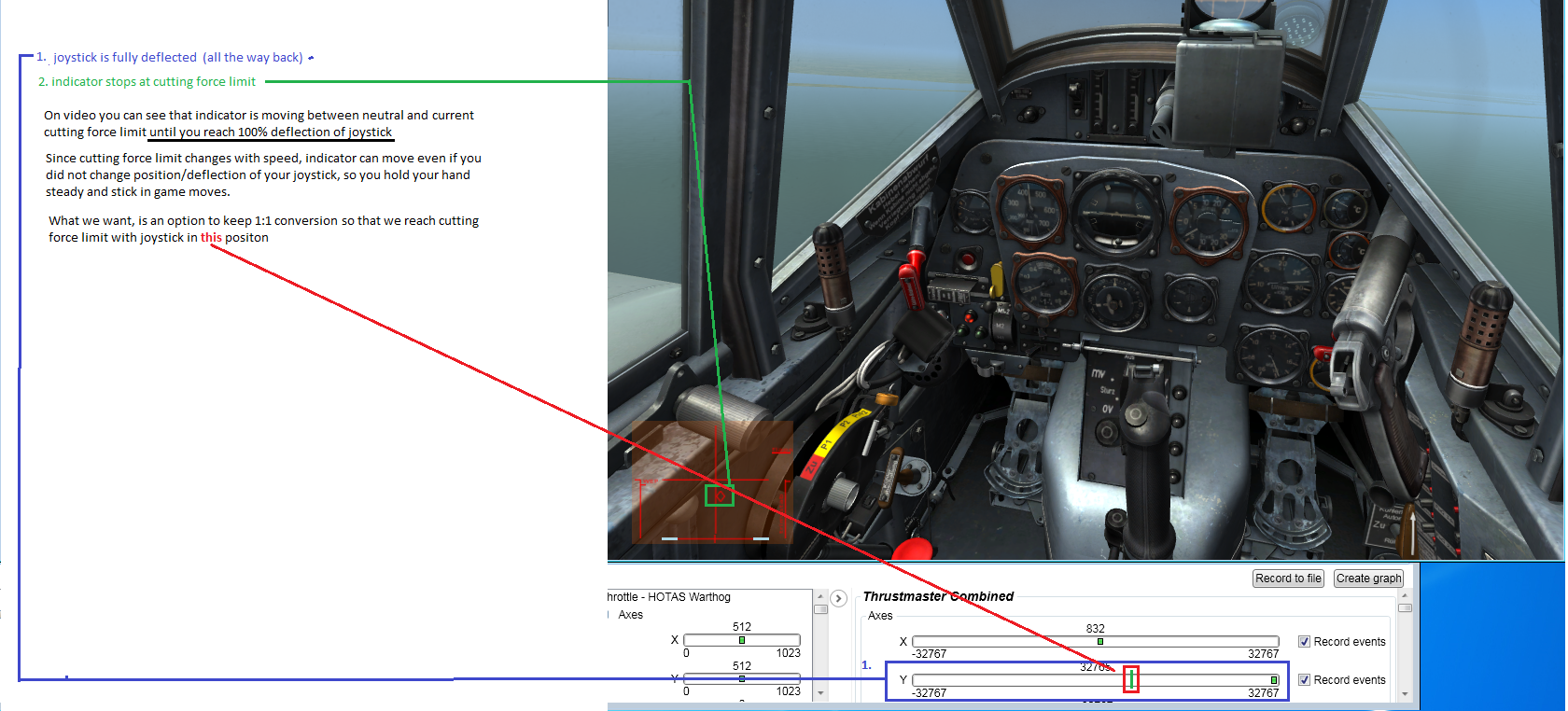
Yo-yo, I really respect you opinion and insight, but please look at the video. At the bottom of the screen there is displayed physical deflection on my joystick Y axis and in my opinion it's apparent that control indicator in game is moving between neutral position and cutting force limit and to reach it I have to move joystick to full deflection. So what I see on the video (and what I'm observing in game) is what I would call re-scaling. (Full range of joystick movement from neutral to max deflection is re-scaled to fit between virtual stick neutral position and current cutting force limit.) I'm using linear curvature for pitch so it's not affected by custom axis settings. I'm not saying that current implementation is wrong, I would just prefer CUTTING while what we have now appears to be more like RESCALING. At least it would be great to have option to choose between those two. -
stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
Ok here's the video. https://www.youtube.com/watch?v=qempD_gNf8k&feature=youtu.be My point is that with current implementation you need full joystick deflection to reach current cutting force limit at given speed. IRL you need fraction of full travel to reach it. I'd really appreciate having an option to reach cutting force with fraction of max joystick deflection similarly as it is IRL. Thing is that moving my joystick further beyond the current cutting force limit would not move virtual stick and controls (indicator would stay at the limit) and won't have any effect on plane performance. A side effect of current implementation is that at the end and when I'm pulling up, with decreasing speed the position of cutting force limit changes and this is causing un-commanded move of the virtual stick (indicator) which tightens the loop/turn although I do not move the joystick -- this is what is pretty counter-intuitive for me.
-
stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
Let's say that at 0km/h speed real/virtual control stick travel (neutral to max deflection) is 20cm. On my joystick it's 5cm. In real plane flying at 700km/h I'll be able to move the real stick e.g. by 2cm (i.e. to 10% mark of available travel) until I reach the point where I cannot apply more force (physiological limit, which is now simulated by cutting force). In current implementation when I fly above speed where cutting force limit kicks in, I have to move my joystick all the way back (5cm or 100% of it's travel) to move virtual controls stick by 2cm to 10% mark of max travel which is the current cutting force limit position. What Id' like to have back is 1:1 travel conversion, at least as an option, even if it means that I can reach the cutting force after just .5cm of available 5cm travel of my joystick. I'm aware that it means that deflecting joystick more does not move virtual control stick further beyond cutting force limit. In other words, if IRL at given speed I would reach cutting force at 5% of max deflection of control stick, I want to have the option to reach that limit it in game by moving my joystick by 5% of it's travel limit. I believe that this is how it was working in DCS before recent patch. This is not removing any limits, it's just changing the way how that limit is reached by player control device. -
stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
Ok David. Sorry I originally misunderstood what you are reporting as an issue. Well after more thorough testing I think I see it. There is no longer 1:1 ratio between joystick deflection and deflection of virtual stick in game. Which means that at 700km/h were you IRL would be able to move the stick just 2cm because you don't have enough physical strength to pull it more. Now you have to move your joystick all the way back to move the virtual stick by those 2cm. So what you are suggesting is keep 1:1 ratio (or make it optional at least) and only what cutting force limit should do is to stop virtual stick movement at that limit even if player keeps deflecting joystick beyond (current) position of cutting force limit. Well, in that case you can count me as converted :). I edited and corrected my previous post http://forums.eagle.ru/showpost.php?p=2331632&postcount=129. -
stick forces-please make them optional
312_Lobo replied to 9.JG27 DavidRed's topic in DCS: Bf 109 K-4 Kurfürst
EDIT: I do not like current implementation where all available physical travel of player device is interpolated between neutral position and (current) cutting force position of virtual control stick in game. Please make the current implementation optional. I'd like to have 1:1 joystick/virtual stick movement ratio back. Even if it means that after reaching the position of current cutting force limit the virtual control stick stops moving in game while there is more deflection travel available on gaming device. Reason for editing: After more testing (and because of this http://forums.eagle.ru/showpost.php?p=2331636&postcount=130 and this http://forums.eagle.ru/showpost.php?p=2331660&postcount=131) I corrected the above statement.