Miguelito.MH
-
Posts
6 -
Joined
-
Last visited
-
DirectX adapter for Brunner FFB Joystick ready
Miguelito.MH replied to Chuls's topic in PC Hardware and Related Software
Does "Down" means 6 o'clock and "Up" is 12 o'clock? -
DirectX adapter for Brunner FFB Joystick ready
Miguelito.MH replied to Chuls's topic in PC Hardware and Related Software
I tested the new file: Spring center works fine (negative offset = forward / left). But now constant force is totally inverted (90: yoke moves left, like it was before / 180: yoke moves to 6 o'clock position). One question of definition: in the help windows of ForceTest.exe you can read: "...specifies the direction in which the force comes from". So, if the force comes FROM 90 degrees, the yoke has to move to the left! ?? -
DirectX adapter for Brunner FFB Joystick ready
Miguelito.MH replied to Chuls's topic in PC Hardware and Related Software
Pitch and roll centering in "Spring center" works perfectly. But a pitch offset -100 is not forward, but 6 o'clock! "Constant force" left and right seems to be the opposit direction (90 deg = left, 180 deg = right, but 0 deg = 12 o'clock and 180 = 6 o'clock). In "Grooves" the spacing has no effect. "Friction" feels a little bumpy, it means, not really constant. And "Damping" is ok. I hope, this helps -
DirectX adapter for Brunner FFB Joystick ready
Miguelito.MH replied to Chuls's topic in PC Hardware and Related Software
You are right! With "Open the brunnerdx.py" I thought you mean "open in an editor" for the IP and force settings. But "execute" was the key word! Now it works in principle, but: The forces sent to the yoke appear to be more random than correct. Regardless of whether in the flight simulator or in the racing game. Do you think you might need some kind of ffb translation specifically for this yoke? -
DirectX adapter for Brunner FFB Joystick ready
Miguelito.MH replied to Chuls's topic in PC Hardware and Related Software
Now I followed the instructions. I had not installed Python, but now it is. The game is recognising the yoke, but I don't get force feedback effects. And I can't calibrate the yoke with the Windows gamecontroller settings. The cross doesn't follow the yoke inputs. Any ideas? Thanks a lot!
-
DirectX adapter for Brunner FFB Joystick ready
Miguelito.MH replied to Chuls's topic in PC Hardware and Related Software
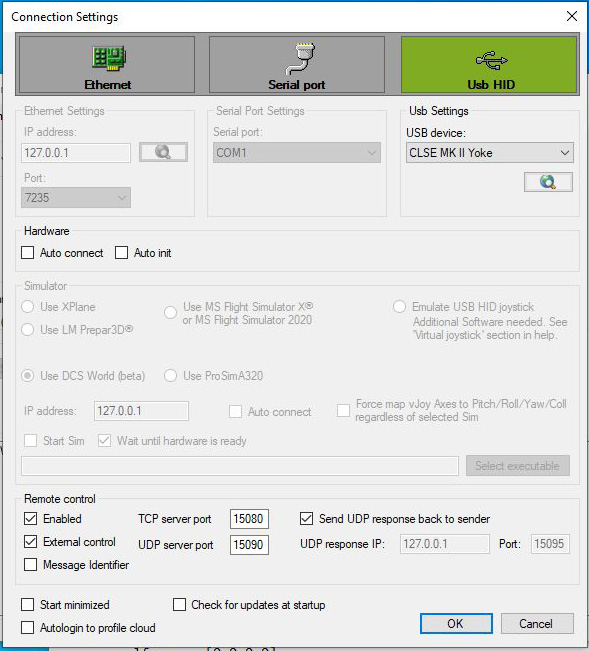
Hi Chuls! I have an Brunner yoke CLS-E MK II. Except of P3D which works fine, I want it to use for racing games like F1 2020 and I was happy to find your Arduino solution, but I didn't get it to work. Is it a problem, that I have installes vJoy? What are the exact settings in CLS2Sim? (for example: Is it "Emulate USB HID Joystick"? And which Port do I have to wite in the brunnerdx.py file - TCP, UDP, UDP response Port ...?) By the way, I have connected the yoke via USB. Is this correct? A lot of questions ;) Thank you very much! Miguelito