DracuOrc
-
Posts
3 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by DracuOrc
-
DIY strain gauge sensor for a Winwing Viper Grip
DracuOrc replied to DracuOrc's topic in Home Cockpits
Reality is rudder pedals but I'm still on a desk and trying to avoid having pedals under ... But you are not the only one working with me - so one day I get convinced . I may keep this design and fine tune it as it is - and just add a set of rudder pedals ... Thanks -
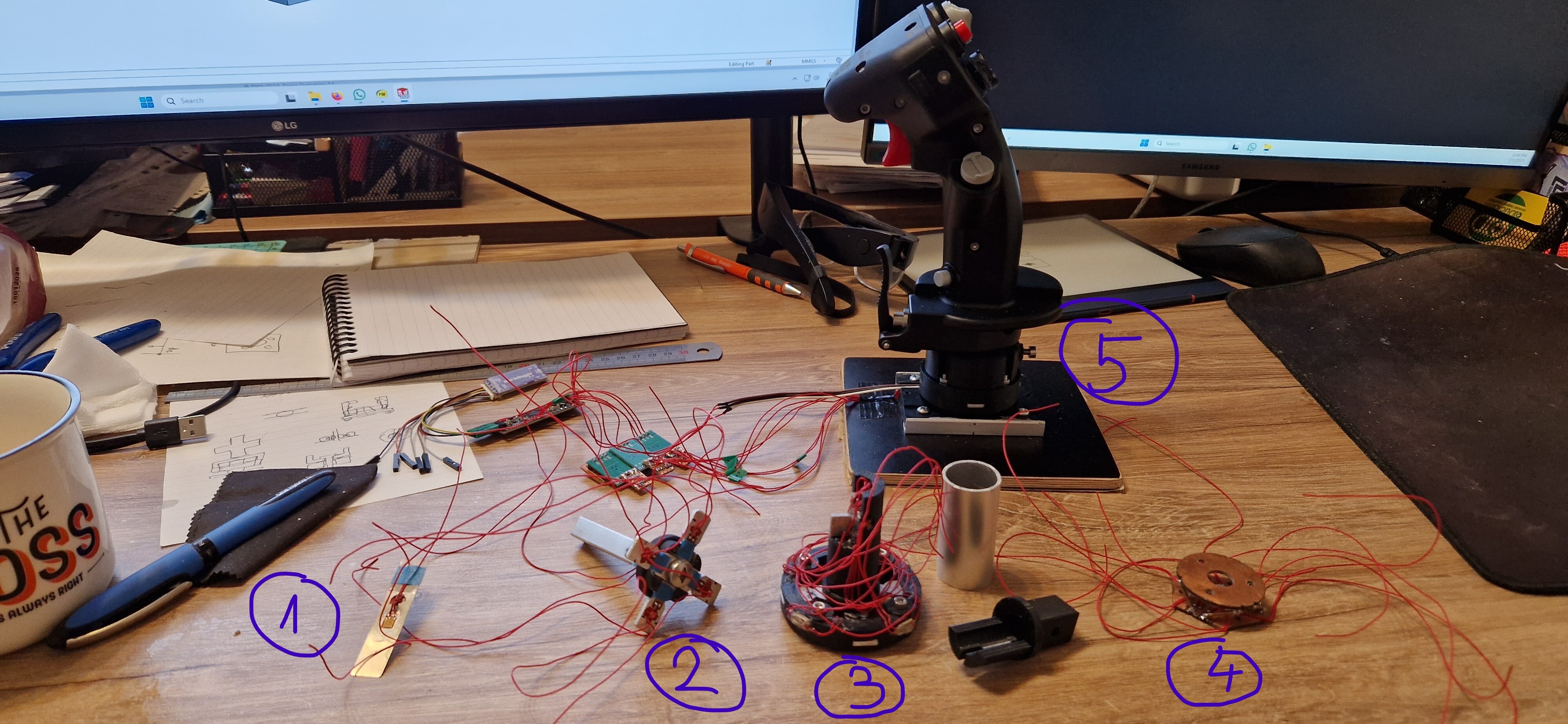
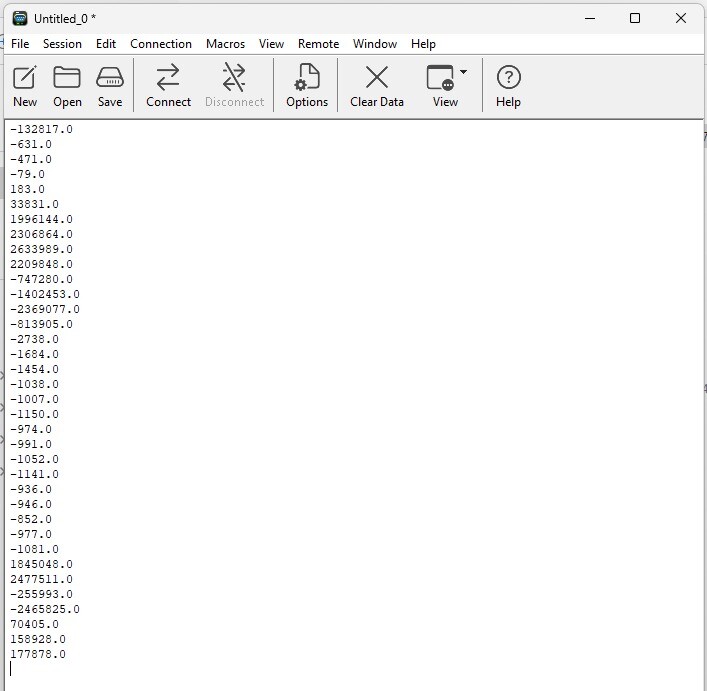
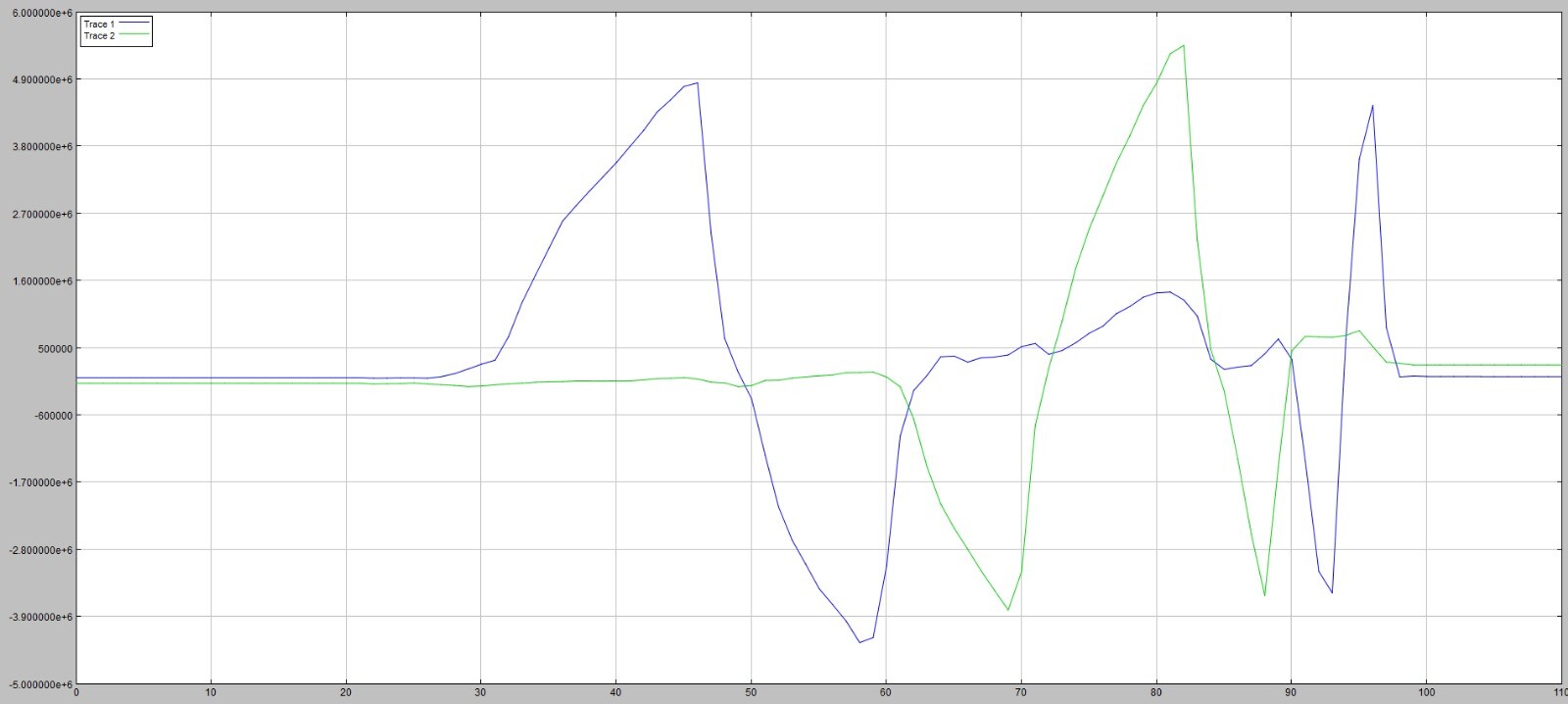
Hi there, As per the title, I am (re)searching, building and testing a solution to make a strain gauge sensor Pitch/Roll/Yaw that can fit to a Winwing Viper Grip. In real life, F-16 stick does not move like a normal stick, it only measures pressure applied by pilot hand. OK, there's a Netherlands F-16 variant where the stick moves +/-3 deg if I am not mistaken. I started some time ago with these tests. Two aluminum beams bound strain gauge on them. They are assembled using 3D printed parts: a central part that keeps the cross and fixes on the grip and another 2 Rings that are fixing the crosses ends then on a base (table). Below my test variants ( in a picture). They all supposed to have advantages and one should have stand ahead with the most. In above picture no. 5 is actually simplified no. 2 or no. 3 . As electronics I use a STM32 MCU running at 100MHz and that has libraries for USB HID devices, so it can make a Joystick with 3 axes and 64 buttons for Windows on it's onboard USB. Also a connection to Viper is used to read all buttons of the the Viper grip then sent to Windows by the same HID USB. The sensor as it is now is really sensitive, it reads from the ADC +/- 4.000.000 with an offset up to 50.000 . Below values during tests - pulled the grip by hand ... And some graphs with values on Pitch (Trace-1) and Roll (Trace-2) ...

- 2 replies
-
- 2
-

-
- strain gauge
- viper grip
- (and 1 more)