MadKreator
-
Posts
1022 -
Joined
-
Last visited
6 Followers



-

Helios Users- New CH-47F Profile V1.0.4
MadKreator replied to MadKreator's topic in Multi-Display Support
Updated profile with viewport and image fixes! Thanks Bluefin! https://github.com/HeliosProfiles/DCS-CH-47F-Profile-by-MadKreator37/releases/latest -
Updated profile with viewport and image fixes! Thanks Bluefin! https://github.com/HeliosProfiles/DCS-CH-47F-Profile-by-MadKreator37/releases/latest
-
Thank you!
-
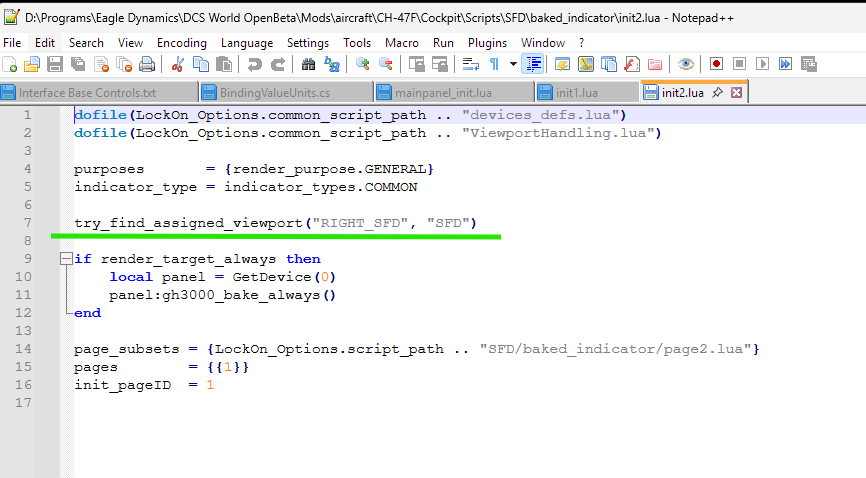
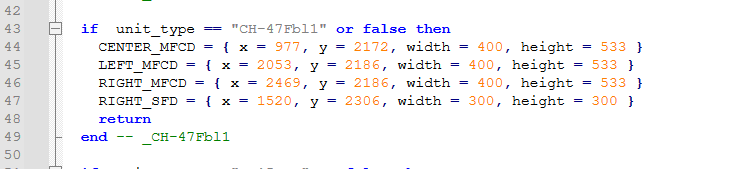
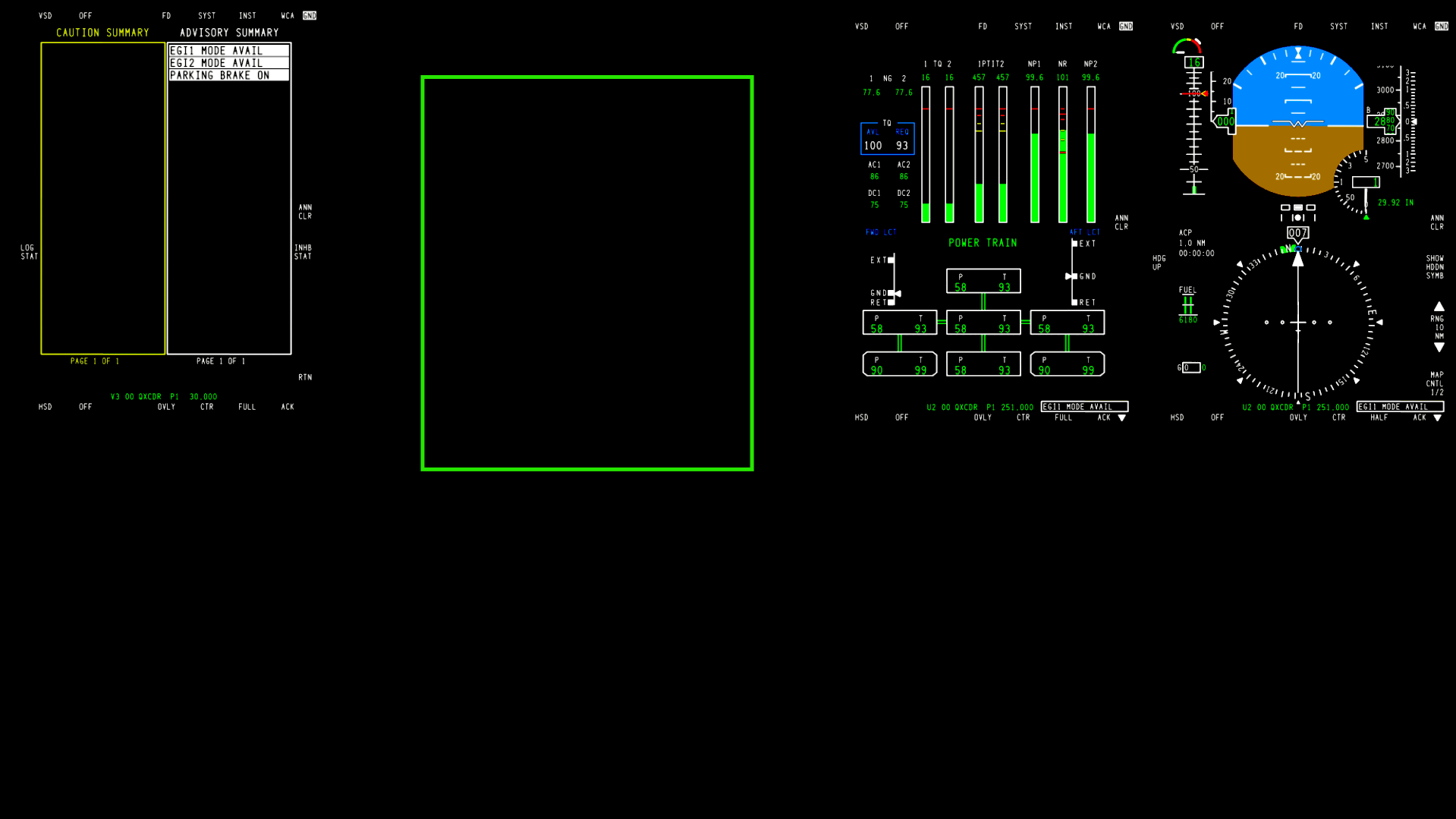
SFD's do not export with native naming. example as in attached picture from core file. " RIGHT_SFD, SFD" When setting them in the monitor file accordingly, they don't export. Also, it removes the SFD from the in-game cockpit ( attached pictures). Track attached fwiw. ch47 no sfd with export.trk

-
if the button works fine in the main menu, but not in a sub page, then it is an issue with the module. the helios control is just bound to activate the appropriate cockpit button. Pushbuttons only have toggle ( latching) and momentary modes.. The page the mfd/cdu etc is on, has no bearing on the function of the helios control... 2 things to check: -Make sure you have two OUTPUT Bindings, one for the pressed action and one for release, no more. - in Control Center "Prefs" turn on " 2nd Click Supression" and run the slider up to 200-300ms ( if you don't have it on).. its helps prevent a quirk that Windows can have with touchscreens where it registers multiple presses quickly... It doesn't necessarily happen all the time
-
If you still had the Helios Patches applied, or you had modified those specific files manually to export, then the update would have returned them to their original, non-exportable format. Either re-install the Helios patches or re-do your modifications to those files, since they aren’t exportable natively by ED.
-
Awesome!
-
Always had a fight getting it to work correctly. In my notes a screenshots I saved, I have that highlighted so it must be important
-
Maybe a dumb suggestion, but on the new pc did you remember to set your resolution to include the total screenspace of all screens? And in the VR settings, check the box for “use system resolution”? Your monitor file looks to be fine. Exports still working fine in 2d for me, haven’t tried mixed reality for a long while, but I kept screenshots of my settings I used to make it work.. I will post them up a bit later on.
-
Helios Users- New Mosquito FB MK.VI Profile 1.0.1
MadKreator replied to MadKreator's topic in Multi-Display Support
Updated 1.0.1 1. Adjusted color of airspeed needle. 2. Removed accidental binding on "Keys" button that was sending cycle commands to the kneeboard.- 1 reply
-
- 1
-

-
Helios Users- New Mosquito FB MK.VI Profile 1.0.1
MadKreator replied to MadKreator's topic in DCS: Mosquito FB VI
Updated 1.0.1 Adjusted color of airspeed needle. Removed accidental binding on "Keys" button that was sending cycle commands to the kneeboard.- 1 reply
-
- 1
-
-
1.0.3 - Changed mixture lever animation to not give missing image warnings.
-
Helios Users- New F4U-1D Profile V 1.0.3
MadKreator replied to MadKreator's topic in Multi-Display Support
1.0.3 - Changed mixture lever animation to not give missing image warnings. -
Helios Users- New F4U-1D Profile V 1.0.3
MadKreator replied to MadKreator's topic in Multi-Display Support
Updated to 1.0.2: Added Throttle Quadrant panels to Dash, L1 and Indicators.. Please see the Readme for using the controls and "Known Issues" about the warnings helios will give you. -
Updated to 1.0.2: Added Throttle Quadrant panels to Dash, L1 and Indicators.. Please see the Readme for using the controls and "Known Issues" about the warnings helios will give you.