BlackPixxel
-
Posts
939 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by BlackPixxel
-
The diamond currently appears to show the gimbal in the horizon stabilized coordinate system. But I think it should be relative to the aircrafts nose, and also not roll stabilized.
-
It is not just the color, it is also the lack of reference antennas and the lack of the external wire channel for those antennas at the bottom of the missile that allow a very clear identification of the passive seeker. And the DLZ sim does not show maximum range, it has safety margin (something about 10-15% if I remember correctly). It is simulating the DLZ on the HUD after all, not the missile.
-
But surely it will not just instantly drop the lock when the target changes hemisphere within gimbal limits? The Dmax2 is calculated under assumption that the target turns away from the fighter at constant overload, meaning it will cross through the 90° angle if it was fired upon in front hemisphere. Would be almost useless if the radar would just instantly lose the target in a close combate in that case.
-
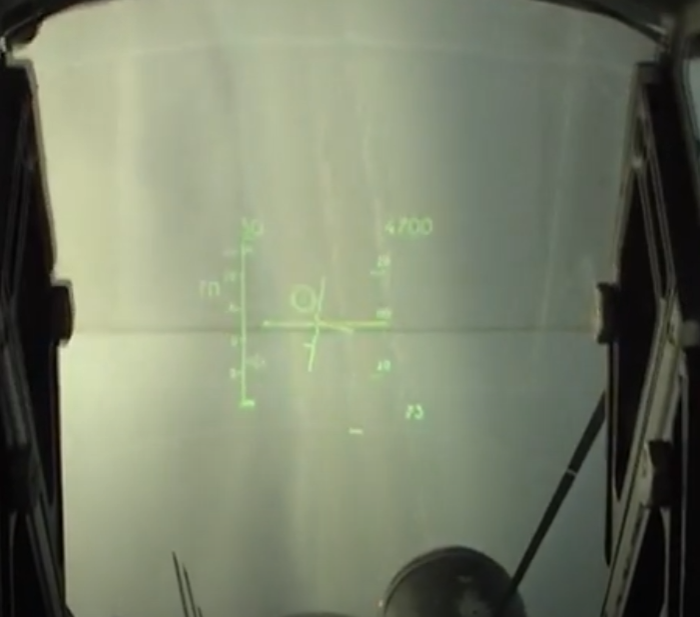
 From technical documentation it is known that brief interruptions in target signal are handled by extrapolation of the memorized target movement. This works more or less in BVR mode the FC3 aircraft. But this mode is entirely absent in any of the close combat modes. Brief interruptions in target tracking will instantly destroy the lock. This is incorrect behaviour, as we can see from this real world MiG-29 HUD footage. Note how it remains in target tracking mode for 2 seconds after the target left the gimbal limit of the IRST: R-73K_shot - YouTube So to make things more correct, the extrapolation ("memory mode") that already works in BVR mode needs to also be added to the close combat modes.
From technical documentation it is known that brief interruptions in target signal are handled by extrapolation of the memorized target movement. This works more or less in BVR mode the FC3 aircraft. But this mode is entirely absent in any of the close combat modes. Brief interruptions in target tracking will instantly destroy the lock. This is incorrect behaviour, as we can see from this real world MiG-29 HUD footage. Note how it remains in target tracking mode for 2 seconds after the target left the gimbal limit of the IRST: R-73K_shot - YouTube So to make things more correct, the extrapolation ("memory mode") that already works in BVR mode needs to also be added to the close combat modes. -
There needs to be more emphasis on this issue, as the recently added behaviour and what the developers seem to be planning to do is wrong. Let's look at the facts: MiG-29B technical description Yandex OCR Translation: So the Radar and the FCS are indeed able to deal with interruptions in the target signal and able to extrapolate based on the memorized movement. Yandex OCR-Translation: Here we can see that a loss of the target signal can be dealt with by extrapolation for up to 4 seconds. Also we see at which period the algorithm is repeated. 20.48 ms when no missile is launched and 51.2 ms when targets are illuminated for semiactive missiles (which adds ~30 ms of illumination after each radar cycle). Now the question is what happens when the gimbal limit is briefly exceeded while an R-27R/ER is still in the air? It is very clear. The target signal is briefly lost. But that is not a problem, the computer will extrapolate based on the memorized target movement, and if the pilot quickly corrects his mistake, the antenna can be pointed at the extrapolated target again without leaving the target tracking mode. The illumination will of course not stop as it does right now in DCS, as we could see the algorithm respects the 20.48 ms and 51.2 ms working periods. MiG-29 HUD FOOTAGE R-73K_shot - YouTube It is in IRST vertical scan mode, locks a flare target and fires a missile. Then it rolls 90° to the right and pulls away. This quickly puts the target outside of the vertical gimbal limit of its IRST. You can even see the exact moment where the flare leaves the IRST limit by imagining a line going from the visible IRST along the radome towards the target. Yet, the single target tracking mode does not instantly stop. It keeps going for 2 seconds. And, even more interesting, it even seems to indicate to the pilot at which corner it lost the target by wiggling back and forth the target circle. Note also how the HUD briefly disappears at the exact moment where the gimbal limit is exceeded. As if the aircraft is aware that the target just got lost, and now it is entering a dedicated mode to deal with this situation (via extrapolation for limited time). (Note that the HUD symbology in close combat modes is very different from what we have in DCS. In the real HUD in close combat mode, the target circle will be placed in a roll stabilized view. This means that the position of the circle is correct in relation to the aircraf siluette on the HUD. The siluette is rolled 90° to the right, and the circle is in the upper left of it. This means that the target is somewhere on the lower left in releation the real aircraft. And that is exactly where the flare was when it left the gimbal limit.) Picture of HUD when the target left the IRST gimbal limit but target tracking mode remains active for 2 seconds. Conclusion There is clear evidence that the MiG-29 (and so most likely also the Su-27 series) will extrapolate the last known target movement even when it exceeds the gimbal limit. And since the working period of the radar is kept accordingly (~20 ms or 50 ms), the target illumination for semiactive missiles will be able to remain. In DCS it doesn't work. The target illumination instantly gets disabled, and will not even continue when the target is back within gimbal limits. On top of that, the plan of ED seems to be to remove the extrapolation mode entirely when the gimbal limit is briefly exceeded. This is very wrong as we can see. But on top of that, the issue we have in DCS is exactly the opposite. Instead of removing the memory mode feature, it needs to be added into the close combat modes where it is entirely absent right now. As we can see from the HUD footage, it is present in close combat modes. Meanwhile in DCS, there is none. Even slightest interruptions in target signal (target notching, zero closure or exceeding limits) instantly stops the target tracking. So this is what should be worked on, not implementing imaginary limitations:

-
Any source of that? I think it comes from misinterpreting the manual. Look at this MiG-29 footage: https://youtu.be/UaDBOiYq0r4?si=AhrNiuHUT3Gh-WgM The flare is locked by the IRST. Then the plane turns away, with the flare far outside the gimbal limits. Still the lock is not instantly lost. It stays in STT, and you can even see the IRST doing a little scanning pattern (left-right movement of the horizon-stabilized target indicator). So any claim that lock is instantly lost is wrong.
-
Missing function from the HUD for all Flankers!
BlackPixxel replied to P1l0t's topic in Su-27 for DCS World
Look how the line is much smaller from the begining. That shows that it takes the geometry into consideration and is not just a pure representation of the 60 s timer. -
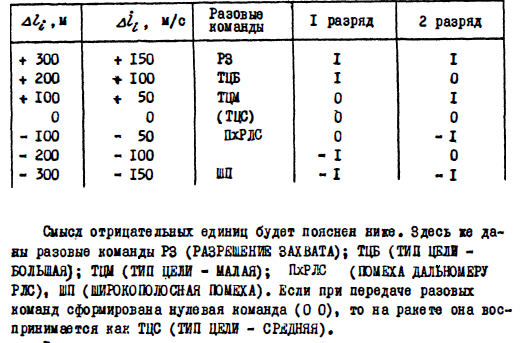
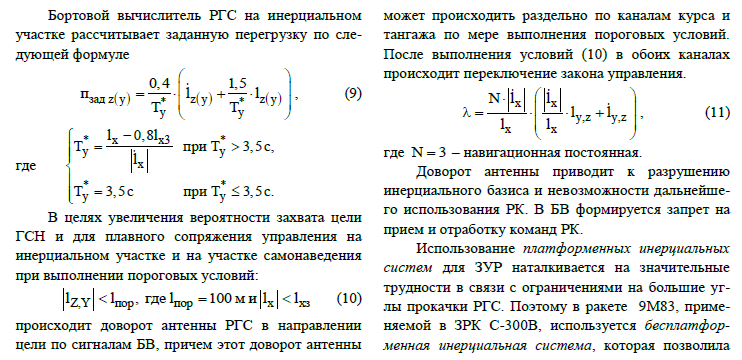
I don't know if I understand you correctly. But the seeker antenna is not aligned to the horizon during inertial flight, it is aligned to an angle that depends on the initial geometry to the target and the targets velocity vector. So if the target flies below, then the seeker antenna will be stabilized looking downwards upon launch. It will look almost in the direction of the target, but not exactly. There is an additional term for an angle offset. The radio correction of the R-27 includes a few commands in addition to the position and velocity corrections. One of the commands is to allow the seeker to capture the target: But there is another document ("АНАЛИЗ ОСОБЕННОСТЕЙ ПОСТРОЕНИЕ СОВРЕМЕННЫХ СИСТЕМ САМОНАВЕДЕНИЯ ЗУР И РАКЕТ ВОЗДУХ-ВОЗДУХ С РАДИОКОРРЕКЦИЕЙ") which states that the missile will only switch to semi active homing when the distance between the seeker and the target projected onto the seeker plane is less than 100 m. And that can happen for both of these 2D axis at separate times. So radio correction might continue to be send, as the plane does not know if the missile has reached this condition for switch to target tracking yet.
-
When the missile is launched, a coordinate system is created at that point. The missile receives initial target position and velocity vector and can extrapolate the target position in this coordinate system based on those values under the assumption of linear movement. And the missile knows its own position from 2xintegration of the values of the 3 axis accelerometer that sit on the seeker antenna which is space stabilized (two gyros are spinning, so it always points in the same direction during intertial flight). The axis of the coordinate system are aligned with the seeker antenna. The PN guidance in inertial flight works to minimize the 2D distance between the seeker antenna and the projection of the target onto the seeker antenna plane. This makes sure that the seeker antenna points directly at the target when it is time to switch to semiactive radar homing. Any change in target position and velocity vector that differs from the current linear extrapolation will be sent to the missile, and the extrapolation then takes those new updates into consideration. For that the aircraft propably models the target movement the same way the missile does in this very same coordinate system.
-
Only because the roll rate exceeds 30°/s or 60°/s, as written in the manual. It is clear that the rate itself is the limit. A slow roll would be fine.
-
Then why does the MiG-29 manual say that this: "В связи с тем что информация по крену при радиокоррекции обновляется с частотой 18—20 Гц, сигналы радиокоррекции правильно выдаются только при угловой скорости вращения истребителя не более 60°/с (при применении ракет выпуска до июля 1986 г. — не более 30°/с). По этой причине не обеспечивается наведение ракеты Р-27ЭР на цель в инерциально-корректируемом режиме при выполнении истребителем противоракетного маневра типа «кадушка»." I think you misunderstood that part. The maneuver works, but the roll rate is limited. It is for example known that during the scanning with vertical scan there is no roll stabilization at all, the roll gimbal is locked. The radar might not be roll stabilized all at during target tracking.
-
This would make the radar pretty useless in a dogfight. Could be that the roll stabilization is only used for BVR scanning mode. And the R-27 is allowed the maneuver described in #2, but with a limit on the maximum roll rate of the aircraft. It is something about the update rate of roll information, not a physical limitation from the radar stabilization.
-
investigating Bug: HOJ broken when target is detected by IRST
BlackPixxel replied to BlackPixxel's topic in Su-27 for DCS World
I mean that it will allow you to launch the missile, and that it does not mean that there is a radar lock by using override and having the missile leave the rail. The missile will of course not track in that case, as the lock remains EO when the target notches. -
Bug with R-77: when STT lock is lost and the missile is not active yet, it will turn extremely hard upwards and climb into space. What is expected: The missile should continue tracking the mathematical target (extrapolating last known target vector). R-77-bug.trk Update: it also affects R-27R/ER R-27R-bug.trk
-
investigating Bug: HOJ broken when target is detected by IRST
BlackPixxel replied to BlackPixxel's topic in Su-27 for DCS World
There is no radar lock in my example, as soon as I leave the vertical IRST gimbal limits the radar goes back to scanning mode. It should not be necessary to use LA override. And with LA override you can launch on notching bandits from an IRST lock lock. This does not mean that there is a radar lock. -
What I find interresting is how the stated max range goes up from 80 to 110 km for R-77-1, but R-77-1 adds stronger motor, better aerodynamics and supposedly the loft. But if the loft was only introduced with the R-77-1, then I would expect to see a much bigger increase in stated max range. If R-77 on the other hand already has loft, then the range increase being from stronger motor and aero alone seems more reasonable.
-
But should the drag penalty of grid fins be not around the transsonic region? Here the missile has a hefty penalty over the whole Mach range. On R-77-1 extra effort was spent on optimizing the shape of the missile for drag reduction, yet the grid fins remained. If they were as bad as in DCS they would be the first thing to go (or not be implemented at all in the first place). I think that the current drag is simply a relict from the older days of DCS / Flaming Cliffs, where AIM-120 also had more drag. We have two aircraft in DCS that use this missile, so it deserves some love and attention as well!
-
It is from this Eagle Dynamics PDF: https://www.digitalcombatsimulator.com/upload/medialibrary/bda/xnncgbqcdftgat1awbmcegln17yf2c8m/R-27_Missile_Family.pdf
-
Why does the R-77 in DCS have such a bad ballistic coefficient along the whole mach range, when for supersonic speeds the grid fins are fine? null
-
Carrying a loadout of just 6 R-77 accelerates almost as slow as a loadout of 6x R-27R + 4x R-73. Which is almost a ton heavier on total (~900 Kg) and has bigger diameter missiles with large fins plus the additional R-73 with more flat IR seeker window. Meanwhile a loadout of 6x R-27 is leaving the 6x R-77 in the dust in terms of acceleration. This can not be right.
-
investigating Bug: HOJ broken when target is detected by IRST
BlackPixxel replied to BlackPixxel's topic in Su-27 for DCS World
It's jammer was working -
Something can in no way be right with R-77 when a loadout of just 6x R-77 is nearly as slow as a loadout of 6x R-27R + 4x R-73 in acceleration: I spawned at 8000 m with 50% fuel, enabled autpilot and went full afterburner. The 6x R-27R + 4x R-73 loadout is 908 Kg heavier than the 6x R-77 loadout, almost a ton! And so much more drag is there from the many missiles and pylons. Yet the acceleration is almost the same as just 6x R-77. It shows that R-77 on pylons have just way to much drag in DCS. A pure 6x R-27R loadout is zooming away from a 6x R-77 loadout.
-
investigating Bug: HOJ broken when target is detected by IRST
BlackPixxel replied to BlackPixxel's topic in Su-27 for DCS World
Here is another example of the bug. I lock the F-15E, he turns on ECM and keeps it on, my lock switches to IRST. I maneuver him out of my vertical IRST gimbal limit, but keep him within radar gimbal limit. Lock is lost, even though radar still points at him and should go HOJ. HOJ_IRST_BUG.trk -
It would surely be nice if our MiG-29S had N011 radar
-
R-77 is a totally different missile than R-27R/ER, why would the radar switch to a mode that is made specifically for R-27R/ER when firing R-77? On top of that, with R-77 4 different targets can be engaged at the same time (With the PESA radars for example). R-27R/ER datalink only allows for up to two targets, there is no bit left in its datalink structure to allow for a third and fourth target. So it can not rely on the old datalink commands from the R-27R/ER