JetPilot
-
Posts
74 -
Joined
-
Last visited
-
Схема в аттаче вверху - упрощенный инструментальный усилитель на 2х ОУ Vref - опорное напряжение, настраивается резисторным делителем (пара резисторов на 1-2к) на полпитания - в качестве одного из резюков можно использовать подстроечный - будет отвечать за установку нуля. Rg - подстройка усиления, т.е. размаха ручки джойстика V2, V1 - сюда даешь сигнал с диагонали моста Vout - выход. На схеме так же не показано питание микросхемы - 4й и 8й выводы для МСР602, соответственно земля и 5V, для другого ОУ гляди даташит на него Коэффициент усиления считается по приведенной формуле на схеме - в зависимости от угла отклонения рукоятки нужно ориентировочно от 50 до 100 вот, кстати даташит на МСР602 - там есть и эта схема, и кое какие рекомендации по снижению шумов MCP60x.pdf З.Ы. да, еще, для снижения шума неплохо бы воткнуть пару конденсаторов поближе к выводам питания ОУ - керамический 0,1 uF и электролит микрофарад на 10 - это немного снизит помехи по питанию А вообще, имхо, если дрожь в пределах 2-5 отсчетов, то можно не парится - добавить маааленькую мертвую зону в настройках, и норм, ну а если больше 10-20 то тогда уже надо копать дизайн платы на предмет более оптимальной разводки, применять меры по снижению чувствительности к помехам, и т.п.
-
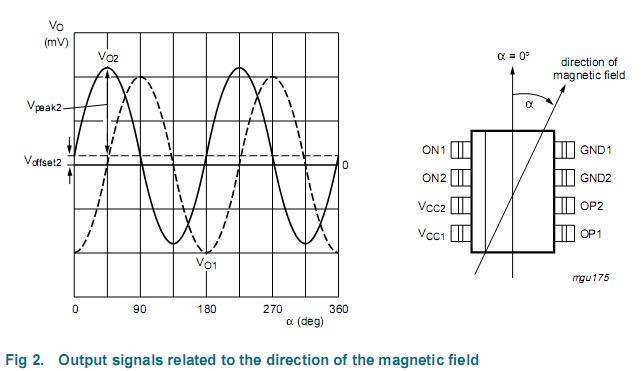
Хм, ИМХО насколько я понял даташит на KMZ-41 его удобнее подключать к выводам на 2,3,6,7 ногах - тогда ось магнитного поля можно разместить горизонтально, а не под углом 45 градусов, ПМСМ удобнее при установке и калибровке, и в качестве усилка вкуснее что то типа MCP602 включенном по сименсовской схеме применить - там и настройка размаха/нулевой точки раздельная, и стабильность получше ----------------------------------------------

-
Хм, вроде как на дистанции больше 3 км, и при использовании широкого поля зрения Шквала, рамка вполне успеват за воздушными целями, при любых ракурсах, а использование нашлемки(даже под управлением мышки) вообще снимает эту проблему. Ну а на дистанциях менее 2-3 км, уже не до прицеливания Шквалом :)
-
Несколько раз был глюк с замиранием картинки, дважды при применении НАР, пару раз просто в полете, после 20-30 минут полета . При этом игра как бы продолжает работать - слышен шум винтов, можно отдавать команды ведомым, переключать элементы управления и.т.д. только картинка при этом не меняется :( Удается даже корректно выйти из мисии путем нажатия ESC и тыкания мышкой наугад в район предполагаемого нахождения кнопки "Выход"
-
а будет накопление ошибок ИНС и необходимость коррекции координат?
-
Прошивка, же вроде бы с закрытыми исходниками... а тумблеры можно имитировать с помощью маппера, например SVMapper - позволяет выполнять раздельный маппинг нажатия и отпускания кнопки джойстика
-
+1, очень бы хотелось реализацию возможности получать данные о состоянии оборудования, для конструкторов железных кабин - вещь просто незаменимая...
-
туда нужно еще докинуть рантаймовые библиотеки от C (мне во всяком случае понадобилось) и класть желательно в директорию, чтобы в пути не было кириллицы библиотеки в аттаче, класть либо в директорию bin программы либо в %SystemRoot%\System32 dll.rar
-
попробуй автодоворот на цель использовать
-
А я у себя вообще удалил эту комбинацию (сброс триммера) из настроек. Все равно на реальном вертолете такого нет. И лишний плюс от такогй манипуляции - гораздо быстрее учишся правильно использовать триммер :)
-

"Шквал". Автоматическое сканирование.
JetPilot replied to Necroscope's topic in DCS: Ka-50 Черная Акула
Ага, несколько раз замечал такое дело. Когда выполняешь активный поиск цели (двигая рамку ШКВАЛа вправо-влево) он иногда срывается, и начинает сканирование. При этом на любые надатия кнюппеля не реагирует. Если, например использовать нашлемку, то после наведения нашлемки и надатия кнопки ЦУ (О) ШКВАЛ вначале перемещается в указанную точку, а затем продолжает беспорядочное сканирование. Помогало включение/выключение И-251 несколько раз подряд, или быстрое перемещение по кругу кнюппеля несколько раз -
Ага, присоединяюсь к просьбе, думаю, сделать так не слишком сложно, но было бы очень даже удобно :thumbup:
-
Кстати, по поводу ошибок - внимательно просмотри каким нибудь хекс-редактором в начало файлов, которые правил - у меня был похожий случай, когда после редактирования файлов (добавлял свои радиостанции) начинались глюки - оказалось, что редактор который я юзал (уже и не помню какой, толи Notepad++ то ли Akel Pad) - зачем то добавил в самое начало файла левые 2 байта, об которые и спотыкался парсер. Тут похоже, чтото другое, но малоли
-
Не забывайте, еще про одну вещь - даже при включенном АП по всем каналам, если нажать и удерживать клавишу триммера, то автопилот переходит в режим, аналогичный директорному (разница только в том, что не отображаются директорные метки). Ну а после отпускания клавиши АП уже начинает стабилизировать заданный режим полета. Таким образом получаем преимущества обоих режимов в одном - на время маневра автопилот не мешает (только демпфирует управление), а по завершении маневра, помогает удерживать новый режим :) З.Ы. а писали об этом неоднократно ))
-
вот, выкладываю библиотеку dll (+исходники в MS Visual C++ 2008) для управления контроллером. библиотека реализует функции обеспечивающие связь, передачу и прием комманд плате. библиотека требует установленной в системе LibUsb-win32. для работы (в том числе и для перекомпиляции при необходимости) LedDriverDLL.rar