GO63
-
Posts
100 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by GO63
-
Вот уже в этом может быть проблема. Провода к передней панели обычно тоненькие и не экранированные. Лучше втыкать в USB на задней стенке, прямо в мамку. Также могут быть проблемы с USB3, лучше использовать гнезда USB2 - которые не синие.
-
Привет! Я так понял, что скорость в Menu.h задана 115200. Нужно ещё раз проверить Connect.ini: [Connect] ComPort = XXX BaudRate = 115200 RTScontrol = 0 TimeOut = 1000 UseWiFi = 1 UDPport = 5550 XXX - настоящий номер COM-порта. SSID, PSK и номер порта также можно ввести в Мониторе порта командами: #eNTPlinkLAN #eP555-55-55 #ep5550 После ввода не забыть переподключить трекер. Если трекер сможет подключиться к роутеру, то LED будет моргать с периодом 2, а не 4 сек. wemos d1 mini работает от USB только при выключенном выключателе питания. Иначе батарея сажает питание USB порта. Ток потребления около 100мА - это не каждая мать для класса COM-порта более 100мА выдаст в USB разъём. Нужно отключить всё от парного USB гнезда, если что-то подключено. Можно попробовать отключить датчик - это уменьшит ток потребления. Можно заменить кабель USB. Можно использовать активный USB хаб. К чему этот вопрос? Раз связь в Мониторе порта есть, значит подключиться по USB удалось, с питанием порядок.
-
Может быть и так. Я не испытывал ESP8266MOD и не знаю, чем он отличается от wemos d1 mini esp8266. Здесь уже делайте всё на свой страх и риск.
-
Проверьте, как моргает LED на Wemos: 1. Если период моргания 2 секунды - значит всё в порядке, трекер смог подключиться к роутеру. Проверяйте настройки Connect.ini. Не используйте VPN подключение. Проверьте, пингуется ли трекер с компа. 2. Если период моргания 4 секунды - значит трекер не подключился к роутеру. Введите логин-пароль WiFi сети правильно. 3. LED не моргает - значит скетч не смог дойти до основного цикла. Проверьте процесс загрузки в Мониторе порта. Проверьте монтаж проводов к датчикам. Проверьте питание. Удачи!
-
Да всё там же, на сайте: https://sites.google.com/site/diyheadtracking/home/diy-razor-ahrs-5dof-20190111/razor-ahrs-5dof-20190111-hardware Только прошивать лучше версией [20191019]: https://sites.google.com/site/diyheadtracking/home/razor-ahrs-5dof-20191019-samodelnyj-inercionnyj-5dof-treker/download-20191019
-
В Opentrack исправлена работа кнопок [Toggle] и [Toggle while held]: Fixed operation of the [Toggle] and [Toggle while held] buttons Попробуйте заменить opentrack-logic.dll в Opentrack-2.3.13 на dll из этого архива: FixToggleButton.rar Удачи!
-
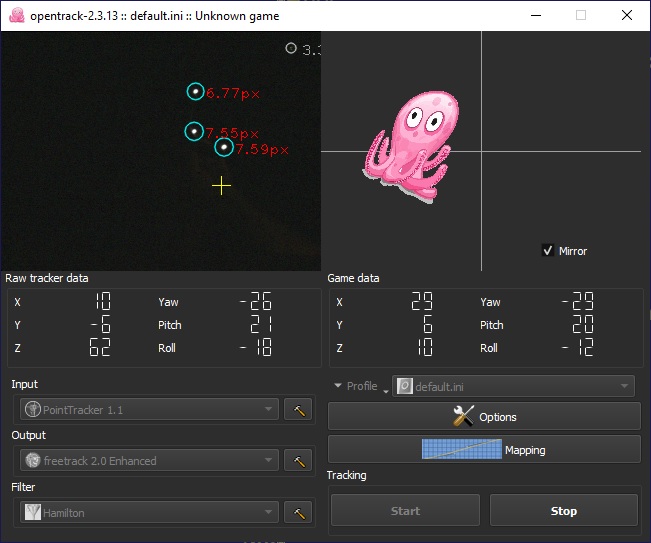
13 марта 2021 опубликован релиз Opentrack-2.3.13 Фичи: Easy Tracker: добавлена поддержка моделей Clip, в которых три вершины расположены сверху вниз (от @Slion). Поддерживается тёмная тема в Windows, если пользователь включил ее в системных настройках (от @Slion). Теперь поза Осьминожки полностью соответствует позе головы пилота самолета. Также теперь вы можете видеть зеркальную позу Осьминожки, если установите галку «Mirror» в положение «ON» (от @GO63-samara). Более компактный размер главного окна, как в Opentrack-2.3.10. Исправленные баги: WiiPointTracker снова теперь отображается во входном списке трекеров. Обновлен PS3 Eye open driver (от @sthalik). Easy Tracker: отключение использования коэффициентов искажения Kinect, что заметно исправляет сильно сломанный компонент Z в векторе смещения (от @Slion). Официальная страница релиза Opentrack 2.3.13: https://github.com/opentrack/opentrack/releases/tag/opentrack-2.3.13

-
А я догадываюсь, что не так. В Arduino IDE 1.8.9 и более новых для Nano нужно выбрать: Инструменты -> "Процессор: ATmega328P (Old Bootloader)". В Arduino IDE 1.8.5 выбора бутлоадера нет, там используется только старый бутлоадер, поэтому и нет проблем с прошивкой.
-
Конечно можно. Версия [20191019] годится для любого исполнения трекера. Для GY-85 нужно выбрать SensorVariant 2 или 9. Я проверял компиляцию в 1.8.9. Но раз никто не жаловался на 1.8.13, скорее всего и в ней скетч скомпилируется.
-
Это не дрейф, а "пружина по Yaw". Лечится только калибровкой магнитометра. Если хотите узнать, что такое дрейф по Yaw - отключите магнитометр, выбрав вместо [Extended] верхнюю строчку [---], пружина по Yaw тут же пропадёт, вместо неё появится дрейф. Дрейф по Yaw будет происходить со скоростью, зависящей от качества калибровки гироскопа и от температуры гироскопа. - такие массивные металлические предметы должны быть на расстоянии не менее метра от головы. Как и металлическое оголовье кресла, стенка холодильника итд. Если не убрать эти предметы, то пружина по Yaw гарантирована. И прошейте уже крайнюю версию [20191019], зачем использовать музейный антиквариат Ahrs_Razor_All_In1? Крайняя версия здесь: Razor AHRS 5DOF [20191019]
-
1. Для варианта Bluetooth лучше подходит связка Arduino Pro Micro и HC-05/06. 2. Я не проверял работу на "wemos d1 mini esp32". Это совсем другой модуль. Проверена работа WiFi трекера на платах "wemos d1 mini esp8266" и "NodeMCU ESP8266".
-
С помощью ESP 12 вы хотите обойти роутер? Тогда получится то же, что и Bluetooth версия трекера. Проще тогда подключить модуль HC-05/06. Я бы посоветовал разобраться с настройками роутера. Выключить VPN, если он включен, возможно, вы ещё какие-либо хитрые настройки применили. Трекер работает с роутером, как обычный компьютер в локальной сети, без каких либо хитростей. Может быть вам стоит сбросить настройки роутера на заводские, и настроить его и локальную сеть заново? Похожая проблема была у товарища из Минска. Он отключил VPN в роутере и тогда сразу трекер заработал, как должен.
-
Тогда я рекомендую испытать трекер на другом компьютере. Или с другим роутером.
-
Я не понимаю, что имеется ввиду под "соединением между двумя Esp8266, направленным один как ведомый, а другой как ведущий". Как запускаете OpenTrack? При включении питания трекер подключается к роутеру и передаёт Broadcast пакеты в локальную сеть. Роутер передаёт эти пакеты каждому из устройств в локальной сети. Получается, что передаются лишние пакеты. Если теперь подключить OpenTrack, то он тоже будет принимать эти пакеты. Без какого-либо диалога между трекером и OT. Попробуйте сначала запустить Razor_AHRS_5DOF_Calibrator или Razor_Battery_Indicator. При подключении к трекеру по кнопке [Connect] передаётся Broadcast команда #s00. Её получают все устройства в локальной сети. Трекер на эту команду даёт ответ #SINCH00 и с этого момента трекер знает IP компьютера, а программа знает IP трекера. Теперь трекер отсылает пакеты только на IP компьютера. Теперь закройте Razor_AHRS_5DOF_Calibrator и запустите OpenTrack. Теперь нет лишних пакетов в локальной сети, может быть пропадут задержки движения? Также я бы попробовал подключить не OpenTrack, а DummyTrack, в режиме индикатора: https://sites.google.com/site/diyheadtracking/home/opentrack/dummytrack-6dof-tracker-simulator-and-6dof-pose-indicator Пожалуй даже лучше с этого начать. Если в DummyTrack нет задержек движения, то однозначно проблема в настройках OpenTrack.
-
Всем привет! В крайней версии OpenTrack-2.3.12 поза Осьминожки по-прежнему отображается неверно. Отображением позы Осьминожки в OpenTrack занимается pose-widget. Я исправил этот виджет. Исправленные баги: Повороты и перемещения Осьминожки теперь выполняются по настоящему независимо друг от друга, как и должно быть в 6DOF. При поворотах нет "шарнирного замкА" (gimbal lock) при Pitch = +/-90 градусов. Исправлены направления осей поворотов и перемещений. Теперь поза Осьминожки отображает реальное направление обзора в самолёте. Исправлено отображение задней (зелёной) поверхности Осьминожки. Раньше она выводилась зеркально. Дополнительные фичи: Применена "перспективная проекция", картинка становится более обьёмной. Добавлен эффект освещения сверху, с той же целью. Добавлена заливка фона виджета. Это даёт возможность видеть границы виджета. Добавлены оси X и Y. Это помогает оценить, насколько Осьминожка отклонён от центра. Добавлена галка [Mirror], отзеркаливающая движения и повороты. Часто бывает удобнее наблюдать за зеркальной позой Осьминожки. Теперь исправленный pose-widget правильно отображает позу Осьминожки и может использоваться для проверки настроек OpenTrack, иногда даже без запуска авиасимулятора. Видео работы исправленного pose-widget: Скачать модифицированный pose-widget можно здесь: https://sites.google.com/site/diyheadtracking/home/opentrack/opentrack-pose-widget-fixed Удачи!
-
Всем привет! Представляю вам новую утилиту DummyTrack. DummyTrack - это софтовый симулятор 6DOF трекера и 6DOF индикатор позы. Это отличный инструмент для проверки настроек OpenTrack, а также для выяснения предельных границ координат обзора в авиасимуляторах. Ключевые особенности DummyTrack. Возможна работа в двух режимах: 1. Cимулятор 6DOF трекера с выходным протоколом "UDP over network" В режиме симулятора поза задается шестью слайдерами с шагом 1 градус и 1 сантиметр. В режиме симулятора полностью отсутствует шум выходных координат. Это позволяет идеально точно установить желаемую позу, что недостижимо при использовании реальных трекеров. В режиме симулятора углы Yaw, Pitch, Roll могут быть заданы в диапазоне +/-180 градусов. Это обеспечивает двойное перекрытие всех возможных комбинаций поворотов (если изменить все три координаты на 180 градусов, то получим ту же самую позу). Ни один реальный трекер таким широким диапазоном углов поворотов не обладает (и не должен). В режиме симулятора выходные данные передаются 50 раз в секунду по протоколу "UDP over network" на локальный IP этого же компьютера. 2. 6DOF индикатор позы по входным протоколам "Hatire Arduino" или "UDP over network" В режиме индикатора входные данные, полученные по протоколам "Hatire Arduino" или "UDP over network" выводятся на экран, по этим шести координатам позиционируется 3D модель Осьминожки. Если выходной протокол Opentrack установить в "UDP over network" и подключить к нему DummyTrack, то это позволит увидеть реальное действие настроек Opentrack (имеющийся в Opentrack виджет "pose-widget" так до сих пор и не умеет правильно показывать позу Осьминожки, даже в крайней версии Opentrack 2.3.12). В режиме индикатора есть возможность транслировать на выход полученные данные по протоколу "UDP over network". Это даёт возможность включить DummyTrack в режиме индикатора между реальным трекером (например, 5DOF инерционником), и Opentrack. В этом случае мы сможем наблюдать позу, полученную из трекера перед обработкой в Opentrrack. Работа с DummyTrack в разных режимах показана в этом видео: ${1} Узнать больше и скачать DummyTrack можно здесь: https://sites.google.com/site/diyheadtracking/home/opentrack/dummytrack-6dof-tracker-simulator-and-6dof-pose-indicator Удачи!
-
20 августа 2020 опубликован релиз Opentrack 2.3.12 Фичи: Экспериментальная поддержка PS3 Eye open driver! Чтобы использовать его, установите libusb как драйвер для "interface 0" камеры. Добавлена поддержка цветовой кодировки для PT tracker: теперь вы можете отслеживать одноцветные цвета (автор @a1k0n). RealSense SDK переключена на 2016 R3 для поддержки новых камер. Джойстик-трекер для Linux (автор @russell). Некоторые улучшения для метода вывода Linux Proton (авторы @jp7677, @russell). Исправленные баги: Исправлен сбой записи лога .csv при нажатии кнопки отмены в диалоговом окне. Исправлено инвертированное состояние "start in tray". Разрешена динамическую позу для кепок. Поддержка в Windows кнопок F13-F24 в качестве хоткеев на некоторых игровых клавиатурах. Исправлена ошибка детектора игр, из-за которой галка детектора игр "enabled" не сбрасывалась при нажатии кнопки отмены в диалоговом окне. Исправлены скачки yaw/roll при пересечении границы + -180 (автор @GO63-samara). Добавлен фильтр Hamilton (автор @ GO63-samara). Снова исправлен vjoystick (на этот раз по-настоящему!). Исправлено залипание сочетаний кнопок с модификаторами, когда первой отпускается кнопка-модификатор. Обновите OVR SDK до 1.43.0. Теперь используется официальный бинарный релиз. Официальная страница релиза Opentrack 2.3.12: https://github.com/opentrack/opentrack/releases/tag/opentrack-2.3.12
-
Вчера и у других такие жалобы появились: https://github.com/opentrack/opentrack/issues/1124 У меня с инерционником и Windows 7 всё нормально. У вас, скорее всего, PointTracker 1.1 и Windows 10. Я думаю, это у Windows 10 вышло неудачное обновление. Я бы посоветовал попробовать откатить обновление или дождаться следующего обновления Windows.
-
Теперь понятно, что строка #include "sensors\_GY-91.h" не влияет на процесс подключения. Я так и думал. Это мы отвлеклись. Что имеем: Трекер без проблем подключается к роутеру. Компьютер и трекер находятся в одной локальной сети. В Опентрек UDP пакеты с порта 5550 не поступают. Вывод - проблема в сетевых настройках компьютера. Скорее всего брэндмауэр не пропускает пакеты с порта 5550, или, возможно Windows заблокировала сетевые возможности Калибратора и Опентрека. Я бы попробовал на время совсем отключить брэндмауэр и проверил настройки сетевых разрешений для Калибратора и Опентрека. Но с этими вопросами уже не ко мне. Удачи!
-
Значит, мне нужно будет проверить компиляцию скетча в Arduino IDE1.8.12. Я не понял, после исправления #include "sensors\_GY-91.h" Калибратор стал подключаться к трекеру? Не понимаю, как это связано. Ну как вам сказать... В общем, я тоже приложил к этому руку ;) :
-
Я использовал для компиляции и прошивки: Arduino IDE 1.8.9 esp8266 by ESP8266 Community версия 2.5.0 А у вас вместо них какие версии?
-
Очень интересно. И при компиляции скетча не было ошибок до этого исправления? А светодиод на NodeMCU моргал с периодом 2 секунды до этого исправления?
-
Хорошие отчёты. Трекер подключается к роутеру без проблем. Сегодня у вас: IP трекера: 192.168.1.13 IP компьютера: 192.168.1.11 Маска подсети: 255.255.255.0 Основной шлюз: 192.168.1.1 Это значит, что трекер и компьютер в одной локальной сети. Пока все верно. В ответе на arp -a есть строчка 192.168.1.13 50-02-91-da-1a-fe dinâmico То есть с компьютера есть доступ к IP трекера. Тоже хорошо. Но этот IP не пингуется командой ping. Это плохо. Почему IP не пингуется, я не знаю, возможно неверные настройки брэндмауэра или роутера. Я бы попробовал на время отключить брэндмауэр. Ещё советую попробовать испытать Opentrack в режиме UDP over network (UDP port 5550). В этом режиме UDP пакеты только принимаются с трекера, а передача по UDP не используется.
-
Ну вы меня как будто не слышите! Нужно проверить IP компьютера с помощью команды ipconfig. В ответе посмотреть: IPv4-адрес. . . . . . . . . . . . : 192.168.1.101 Маска подсети . . . . . . . . . . : 255.255.255.0 Маска подсети должна совпадать с маской в трекере, а IP должен начинаться со 192.168.1 Это так?
-
portqry - тоже не нужен. Достаточно команды ping. В вашем случае должно быть примерно так: С:\>ping 192.168.1.10 Обмен пакетами с 192.168.1.10 по с 32 байтами данных: Ответ от 192.168.1.10: число байт=32 время=4мс TTL=255 Ответ от 192.168.1.10: число байт=32 время=1мс TTL=255 Ответ от 192.168.1.10: число байт=32 время=1мс TTL=255 Ответ от 192.168.1.10: число байт=32 время=4мс TTL=255 Статистика Ping для 192.168.1.10: Пакетов: отправлено = 4, получено = 4, потеряно = 0 (0% потерь) Приблизительное время приема-передачи в мс: Минимальное = 1мсек, Максимальное = 4 мсек, Среднее = 2 мсек G:\>