nikolas0618
-
Posts
10 -
Joined
-
Last visited
-
I'll try tomorrow. Thanks.
-
can you draw where it is? only on SLAVES?

-
NANO numbers are different. Maybe add a capacitor too? where did you put it?
-
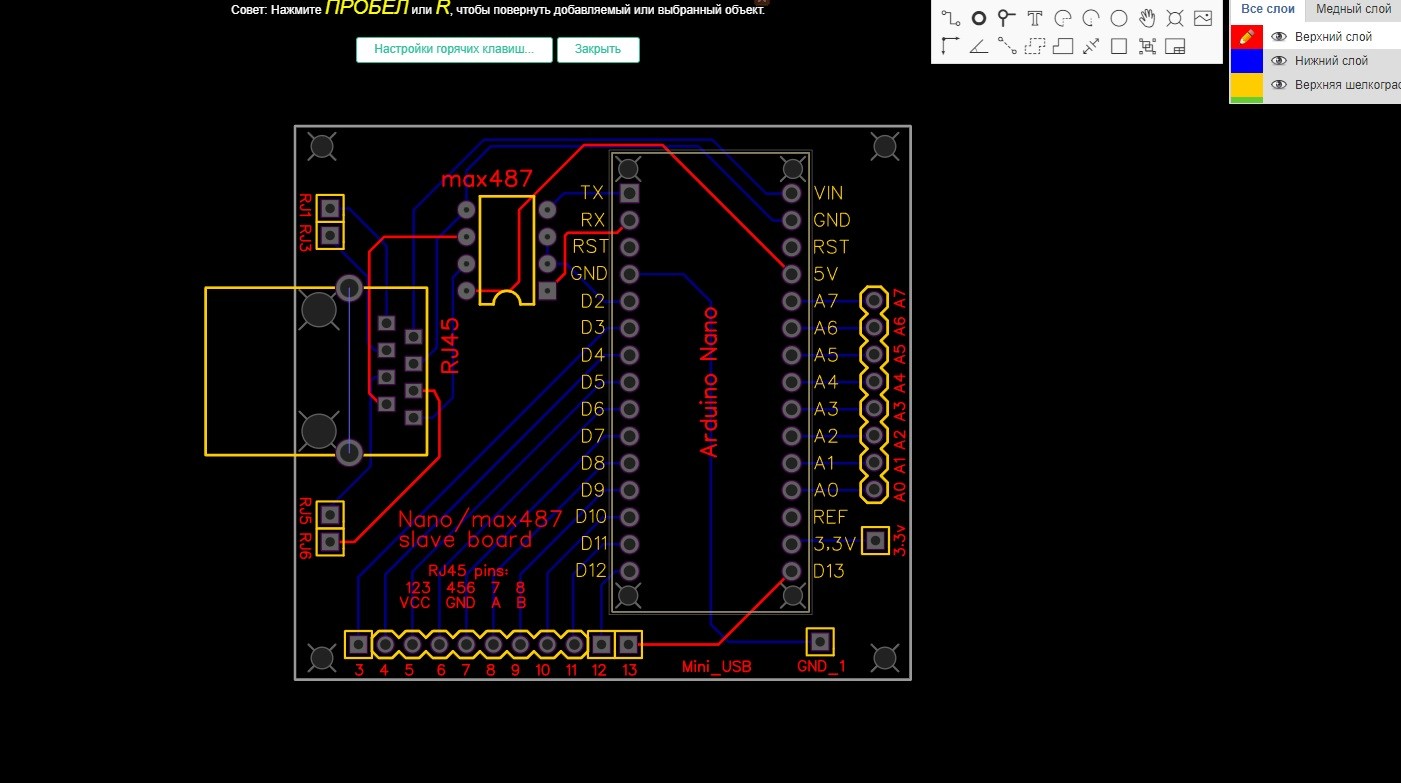
реализовал схему МАСТЕР - СЛЕЙВ (oshwlab.com/qrethus/arduino-nano-and-max487-chip-with-female-rj45-connector), но работает корректно только с одним НАНО. Ставишь 2 и более - работа неправильная. если кто то реализовал данную схему или разбирается в данном вопросе, посоветуйте что там не так. возможно, где то резисторов не хватает?easyeda.com/editor#id=5eb322b2c945425da1a51bcd0a97a04b
-
need help. made the master slave system 487 according to the drawing. if one NANO, then everything works. when more than one NANO, interference occurs. It looks like there are not enough resistors somewhere? oshwlab.com/qrethus/arduino-nano-and-max487-chip-with-female-rj45-connector
-
у меня нету ватсапа. есть только почта, ВК и телефон.
-
возьму пожалуй. напишите на почту nikolas0618@yandex.ru или ВК https://vk.com/id206325661.
-
Продается Oculus Rift CV1 за 15 тыс. руб. Комплект из шлема, 2 датчиков, 2 геймпадов. Все в отличном состоянии. Продается в связи за ненадобностью (не выходит нормально посидеть в связи с рождением ребенка). Обращаться сюда, на почту nikolas0618@yandex.ru или ВК https://vk.com/id206325661. Живу и работаю в Нягани (ХМАО).
-
 nikolas0618 changed their profile photo
nikolas0618 changed their profile photo -
/*
Tell DCS-BIOS to use a serial connection and use interrupt-driven
communication. The main program will be interrupted to prioritize
processing incoming data.
TACAN with 7 seg Display and TM1637
This sketch sets the Pro Mini as a Slave to the RS-485 Bus for the right console.
NOTE: #defines are to be placed before the #includes
*/#define DCSBIOS_IRQ_SERIAL
#include "DcsBios.h"
#include <TM1637TinyDisplay.h>
#include <LedControl.h>String TACAN = ""; // Declare global new string variable
char Digit0 = ""; // Declare global new character variable
char Digit1 = "";// Declare global new character variable
char Digit2 = "";// Declare global new character variable
char Digit3 = "";// Declare global new character variable
int TACAN_power = 0;int Tacan_ingame1; // hold value from DCS for ones
int Tacan_ingame10; // hold value from DCS for tens
int Tacan_ingame100; // hold value from DCS for hundreds
//FIRST - 4 DIGIT 7 SEGMENT DISPLAY- tacan
// Module connection pins (Digital Pins)
#define CLK 2
#define DIO 3
TM1637TinyDisplay display (CLK, DIO); //set up the 4-Digit Display
DcsBios::Switch2Pos tacanTestBtn("TACAN_TEST_BTN", 23);
DcsBios::LED tacanTest(0x10da, 0x0400, 13);
DcsBios::PotentiometerEWMA<5, 128, 5> tacanVol("TACAN_VOL", A0);
const byte tacanModePins[5] = {4, 5, 6, 7, 8};
DcsBios::SwitchMultiPos tacanMode("TACAN_MODE", tacanModePins, 5);
DcsBios::Switch2Pos tacanXy("TACAN_XY", 22);
DcsBios::RotaryEncoder tacan10("TACAN_10", "DEC", "INC", 9, 10);
DcsBios::RotaryEncoder tacan1("TACAN_1", "DEC", "INC", 11, 12);
DcsBios::Switch3Pos a102HmcsPw("A102_HMCS_PW", 52, 53);void onTacan10Change(unsigned int newValue) {
display.showNumber(newValue, true,2, 0);
}
DcsBios::IntegerBuffer tacan10Buffer(0x1158, 0x0f00, 8, onTacan10Change);
void onTacan1Change(unsigned int newValue) {
display.showNumber(newValue, false,1, 2);
}
DcsBios::IntegerBuffer tacan1Buffer(0x1158, 0xf000, 12, onTacan1Change);void onTacanXyChange(unsigned int newValue) {
display.showString (newValue ,1, 3); // affiche la partie chaîne en seulement le 4ème chiffre
}
DcsBios::IntegerBuffer tacanXyBuffer(0x1168, 0x000f, 1, onTacanXyChange);
// Canal TACAN
void onTacanChannelChange (char * newValue) {
Digit0 = TACAN.charAt (0); // récupère une valeur de caractère individuelle à cet index spécifique dans la chaîne
Digit1 = TACAN.charAt (1);
Digit2 = TACAN.charAt (2);
Digit3 = TACAN.charAt (3);
if (TACAN_power == 0)
display.showString(newValue, 4, 0);
}
DcsBios :: StringBuffer <4> tacanChannelBuffer (0x1162, onTacanChannelChange);
void onTacanModeChange(unsigned int newValue) {
if (newValue == 0){
display.setBrightness(0, false);}
else {display.setBrightness(15, true);}
}
DcsBios::IntegerBuffer tacanModeBuffer(0x1168, 0x000e, 1, onTacanModeChange);
DcsBios::ActionButton tacanXyToggle("TACAN_XY", "TOGGLE", 22);void setup(){
display.clear();
DcsBios::setup();
}
void loop()
{
DcsBios::loop();
}
-
ILS
/*
Tell DCS-BIOS to use a serial connection and use interrupt-driven
communication. The main program will be interrupted to prioritize
processing incoming data.
This should work on any Arduino that has an ATMega328 controller
(Uno, Pro Mini, many others).
*/
#define DCSBIOS_IRQ_SERIAL
#include "DcsBios.h"
#include "TM1637TinyDisplay6.h"
#include "DcsBios.h"
#include <LedControl.h>//FIRST - 6 DIGIT 7 SEGMENT DISPLAY-Ils
// Module connection pins (Digital Pins)
#define CLK 2
#define DIO 3
TM1637TinyDisplay6 Ils(CLK, DIO); // 6-Digit Display Class IlsDcsBios::PotentiometerEWMA<5, 128, 5> ilsVol("ILS_VOL", A0);
DcsBios::Switch2Pos ilsPwr("ILS_PWR", 4);
DcsBios::RotaryEncoder ilsMhz("ILS_MHZ", "DEC", "INC", 6, 7);
DcsBios::RotaryEncoder ilsKhz("ILS_KHZ", "DEC", "INC", 11, 12);
DcsBios::Switch3Pos a102HmcsPw("A102_HMCS_PW", 8, 9);
//ILS
void onIlsMhzChange(char* newValue) {
Ils.showString(newValue, 3, 0);
}
DcsBios::StringBuffer<3> ilsMhzStrBuffer(0x116e, onIlsMhzChange);
void onIlsKhzChange(char* newValue) {
Ils.showString(newValue, 2, 4);
}
DcsBios::StringBuffer<2> ilsKhzStrBuffer(0x1172, onIlsKhzChange);
// Canal Ils
void onIlsFrequencySChange(char* newValue) {
Ils.showString (newValue, 0, 6);
}
DcsBios::StringBuffer<6> ilsFrequencySBuffer(0x12d8, onIlsFrequencySChange);
void onIlsPwrChange(unsigned int newValue) {
if (newValue > 0){
Ils.setBrightness(15, true);
}
else {Ils.setBrightness(15, false);
}
}
DcsBios::IntegerBuffer ilsPwrBuffer(0x1168, 0x0010, 4, onIlsPwrChange);
void setup()
{
DcsBios::setup();
Ils.clear();
}
void loop()
{
DcsBios::loop();
} -
Конструирую кокпит миг 21. Изображение выводится проектором на стену. Соответственно нужен вид, где будет только прицельная сетка. При активации режима "вид только илс" - прицельной сетки нет. Как ее реализовать в данном режиме?