nadsat
-
Posts
25 -
Joined
-
Last visited
-
А разве радар в КВО не может определить свой или противник?
-
Так в том то и дело, что их взаимодействие ни чем ни различаются независимо от режима. ОЛС также отслеживает цель, радар получает ту же самую информацию – угловые координаты цели, и радар получив команду ввода пытается захватить цель, что он может делать во всех имеющихся ЧПИ. На радара то, как ОЛС захватил цель, не имеет ни какого влияния. Так скажи хоть одну техническую причину, которая мешает радару использовать СЧП если ОЛС захватил цель в опт и шлем. Кратко говоря в ВЧП не найдем цели ближе 10 км, а в СЧП ошибка в дальности, и опасность срыва - ну и как это непозволяет их использовать? Да, риск совсем не найти или потерять цель больше, но все таки можно. По определению когда радар не ведущий канал, он всегда в режиме КВО, только вопрос какие ЧПИ он может при этом использовать.
-
Все что здесь написал говорит что это может быть непрактично, имеет всякие ограничения, но не невозможно. Чем отличается работа ОЛС при сопровождении цели в тп, опт, шлем и других режимах? Ничем, ОЛС неинтересно цель в 20, 10 или 5 км, она только передает угловые координаты цели радару и все. Так почему в одном случае радар может захватить эту цель, а в другом не может?
-
Название темы - "Краткие сведения о системе управления вооружением", и в ней говорится не только про ДВБ.
-
Как не добавит, может процитировать твои же слова? Решит это ситуацию где неможешь захватить визуально видимой цели? – решит, вот и добавление реализма. А то как далеко ОЛС от реала, я сам уже говорил, но здесь если что и изменится, то только в следующем проекте, а снять лимит можно сейчас. Ну так совсем демагогия началась. Так хочешь чтоб радар реалистично работал или хочешь просто чтоб было как ты сказал? Вот я написал как радар работает, мои слова обоснованы РЛЭ, есть цитата. А с тебя не аргументы, а реплики не по теме. А снятие лимита это только одно из возможных решений. Я уже говорил – можно сделать ОЛС ведущим каналом при ближнем бою, можно снять лимит – что легче.
-
Претворяешься что не понял. Разные компоненты игры влияют на реалистичность в содействии, а не в одиночку. Хорошо было, чтоб все было 100% как в реале, но это трудно, это только в следующем проекте и так далее. А ты стремишся чтоб то, что можно сделать сразу сейчас и что привело к общему увеличению реалистичности, не было сделано. Хорошо, вот мой довод не комментируя твоих. Переключатель режимов радара устанавливает обзорные режимы радара (и в последствии дальность захвата), когда ведущий канал радар. При ведущем канале ОЛС, а это по дефолту ТП, ОПТ, ШЛЕМ, радар работает в квазиобзорном режиме, где цель не ищет, а получает угловые координаты уже захватченной цели и измеряет дальность, а также может произвести захват этой цели. Дальность захвата при этом по крайней мере не менше 15 км. В Локоне это не реализованно, точная реализация возможна только в следующем проекте. Для того, чтобы хотя имиторовать ефект, который этот режим дает при боевой обстановке, надо снять лимит в 10км с режимов строб и шлем, что можно сделать в следующем патче.
-
Ну так если у тебя доки, скажи что нибудь из них про работу радара, а то говоришь не про радар, а про переключатели, и все свои доводы строишь на том, что есть только три режима радара, и если переключатель стоит здесь, значит все одинакого. А про режим захвата забыл, а также про режим КВО - вот тебе и режим, в котором радар работает в взаимодействии с ОЛС и может захватить цель, которую уже отслеживает ОЛС, дальше 10 км: "режим КВО (квази обзора), используется при работе РЛПК в качестве ведомого канала. В режиме КВО, после захвата цели ОЛС, РЛПК при установке переключателя ИЗЛ-ОТКЛ в положение ИЗЛ переодически (через 5 с) кратковременно включает передатчик и измеряет дальность до цели (с индикацией ее ха ИЛС). При достижении дальности до цели меньше 15 км, РЛПК автоматически осуществляет захват цели и переходит из режима КВО в режим РНП."
-
Главная цель - реалистичная боевая обстановка, а не моделирование какой нибудь системы. И моделируя одно, но не моделируя другого, можно только снизить общую реалистичность. Вот ситуация - цель видишь простым глазом, но не можешь захватить, реалистично? А в Локоне этот лимит как раз к этому и приводит.
-
Кто здесь упорный? Ты хочешь чтоб было как в реале, или просто чтоб лимит был? Здесь мы разговариваем o способностях радара, но то что этот лимит наносит ограничения и на ОЛС, и только по этому уже есть нереалистичный уже забыл?
-
А откуда эта цитата? - в РЛЭ такого невидел.
-
Все правильно, это не обзорный режим. А разве при опт и шлеме радар производит обзор? Как раз там его функция и есть захват. Мы в ручную двигаем ДНА и находим цель, а тогда нажимаем тот самый "ВВод" и радар производит захват. Логично следует, что радар тогда и переходит в режим РНП, и нет значения где стоит переключатель обзорных режимов. Да, но радар один в режимах опт и шлем работать неможет. Режим бл.бой в Миг29 связан с зоной сканирования – если ближний бой, тогда только вертикальное сканирование. Вот не забыл дописать – это разные режимы. ТП – когда ОЛС ищит в ДВБ, а ББ – ОЛС в вертикаьном сканировании. Так как по твоему происходит совместная работа ОЛС и радара в ТП – ОЛС смотрит вдаль, а радар все равно сканирует вертикаль? Эти доводы следует из твоего предположения, что радар в содействии с ОЛС работает точно так же, как один в обзорных режимах. А это не так. Hекоторые параметры радара точьно меняется – зона обзора, алгоритм абработки возвратов. Скорее всего прости вклюьается РНП режим.
-
Так поставить ограничения удалось и в патче, а снять уже нужен новый проект :) Сделайте хоть одно, что легче - или снять лимит дальности радара с опт/шлема, или сделать ОЛС ведущим, а то теперь неможно нормально пользоватся не одним.
-
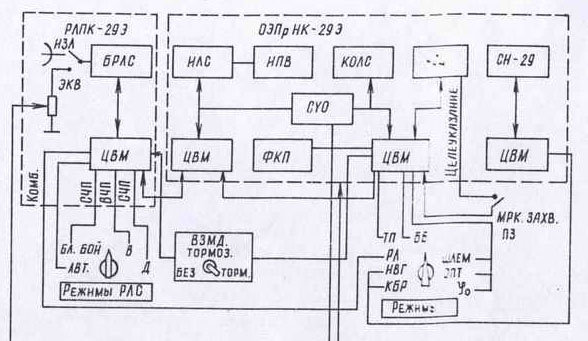
Интересно что ты понимаешь под термином режим радара. По твоему этот единственный тумблер контролирует все параметры работы радара? Как насчет РПН - режим захвата и непрерывной пеленгации. В РЛЭ он именно называется режимом, после получении команды захвата радар переходит в режим РПН - начинает поиск по малой зоне (3 градуса), а после признака цели она становится на сопровождение. А где это на панели? Хоть прямо и не написано, но по всей логике работы захвата цели в опт и шлем, должен применяется именно этот режим. А если уж рассуждать по тумблерам, так вот схема управления радаром и ОЛС Миг29. Этот тумблер В–Д-Авт-Бл.бой активен когда переключатель режима СУО стоит на РЛ. И ближний бой здесь только вертикальное сканирование – в опт и шлем радар работает только в взаимодействии с ОЛС. А вот становим переключатель СУО в ТП и включаем взаимодействие с радаром – на каком режиме радар будет работать? А когда становим на положение шлем? Что нам мешает поставить СУО в шлем, включить взаимодействие с радаром и поставить радар на Д?

-
Я здесь говорю не о ручном изменении пилотом, а о конструкции самого радара. Конструктивно неть смысло менять ЧПИ режима, выпольняющего тоже самое. Ну и что здесь странного? Многое из того что я говорил практически слово в слово написано в РТЭ Су27 - там обясняется почему меняется ЧПИ в разных режимах и что из этого следует. А вот твоя логика мне странная - что я должен видеть из этой картинки? Это режимы радара - форма зоны обзора, способ захват цели, и это не связано с ЧПИ. Есть другой переключатель - ППС-АВТ-ЗПС, вот он то прямо меняет ЧПИ, и то не всегда, как уже говорил у вертикали свой уникальный ЧПИ. У тебя получается какая то не техническая, а литературная логика - у ближнего боя есть такое ЧПИ, шлем и строб это ближний бой, значит дальность та же самая. Но надо смотреть не как они называется, а как технически это реализовано, как видим из РЛЭ и РТЭ это технически разные режимы, а то что их всех назвали ближний бой (и то только у Су27) не значит что все одинаково.
-
Ну не сказал чтобы дальность применения одинакова. В любом случаи пилоту луче, чтоб он мог захватить цель как можно дальше - визуальная дистанция это не константа, какой Ил-76 может быть увидишь и далее чем 10 км. В режимах строб и шлем цель ты находишь сам, направляешь на нее узкий луч радара, и радару остается ее захватить. В том случаи нет смысла менять ЧПИ – радар выполняет практически ту же работу, что и при захвате цели в ДВБ. А вот при вертикале, радару приходится не только захватить, но самому и найти цель. При этом зона обзора самая большая (даже больше чем при сканировании в ДВБ) и гамма скоростей и аспектов целей тоже самая большая. Так чтоб это все увидеть и меняется ЧПИ – до самых больших частот, может быть самые дальшие возвраты отбрасывается как ложные, вот и получаем самую малую дальность. Так что по моему в реале причина снижения дистанции не то что просто придумали ЧПИ для ближнего боя, кторая бы ограничило дальность в 10 км., но специфика сканирования ближнего вертикального пространства требует такой работы радара, которая вызывает и снижение дальности. А насчет Локона, у меня подозрение что просто наложили лимит - если дальность больше, непозволяем захвата и все.