
JNelson
-
Posts
433 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Posts posted by JNelson
-
-
v2.0.0-beta-3 has been released, anyone who was waiting for fixes/additions can get it here: https://github.com/heclak/community-a4e-c/releases/tag/v2.0.0-beta-3
-
 3
3
-
 7
7
-
-
4 minutes ago, Vettefan said:
Yes, but I am not able to select my "standard" carrier frequency 127,500 in the radio. Checked that also later in the Mission Editor as a pre-set frequency for the A-4 and it returned an "invalid frequency" error (but only for the A-4E! - my Tomcat and Hornet still allow for 127,500...).
When I now set my carrier frequency to e.g. 300,000 and do the same as a pre-set frequency in the plane, it works all fine and I can communicate with the carrier!
Yea that's because the Hornet has a V/UHF radio. The A-4 does not have a VHF radio only a UHF radio.
-
2
-
-
17 hours ago, Vettefan said:
Great mod! - just downloaded it and really start to enjoy it.
But I seem not to be able to tune into the carrier frequency and e.g. call "inbound": The menu-items remain greyed out (via the comms.-menu: "\" // "#" I am using a German keyboard layout, so "#" it is for me).
When starting the same flight in my Tomcat or Hornet, all works well.
Is this functionality not yet implemented or am I doing something wrong?

Many thanks in advance!

Did you turn the radio on?
-
17 hours ago, MagicSlave said:
Does anybody have any good tips on “flying the ball” in the A-4? I’m really struggling on keeping her attitude / descent rate under control and making controlled corrections. There is a good bit of lag in the engine response to throttle changes, so it feels like it is easy to overcorrect and end up with the nose pitching up / down more than you intended. Then on the other hand it seems kinda responsive around the “sweet spot” throttle setting for on-speed and desired descent rate, where you are able to make small adjustment and get the jet respond quite quickly. So sometimes I feel like the key to succes is to anticipate: if I'm sinking too fast, get the power on for 1-2 seconds then throttle back down to "the sweet spot". If I'm too high, then get the power off for 1-2 seconds and then back to sweet spot. Then at other times it seems that what ever I do, is too much or too late and the pitch just gets out of control. Then again other times it feels like it is a matter of finding the sweet spot on the throttle and then making just small adjustments. So I am kind of struggling in my head with what would be the "correct" mindset for this?
What surprises me is how easily she seems to float with throttle “off”. One would think that with those delta wings it would fall of the sky pretty easily with the power down – or is it just the engine lag and me overcompensating a too high descent rate with too much power and then trying to power off too late?
I recently read this article, and I would agree that the A-4 in the mod also feels like it stays pretty well on the yellow doughnut once trimmed on-speed, as long as you don’t end up needing too large throttle adjustments:
“One of the beauties of the TA-4 was that in the approach environment, it flew exactly like what you were taught to think a navy jet should fly like. Attitude controlled airspeed and power controlled rate of descent. So once you got it trimmed in pitch, it pretty much maintained that speed. If you started to see a change in glideslope from the meatball, you simply made the appropriate power correction to return to a centered ball. I loved flying it, and the way that it flew. “ (https://www.thedrive.com/the-war-zone/9599/a-tomcat-pilots-early-struggles-to-tame-the-mighty-f-14) I really would love to get the hang of these "appropriate power corrections" and just return to a centered ball!

So any words of wisdom? What is your tactic with ball flying in A-4?
Don't get slow, you will get hammered by they huge amount of induced drag that comes with a delta wing. Keep it on speed or faster. I also find using the airbrakes keeps the engine at a higher RPM which tends to have a slightly faster spool time for power changes. Also don't stop moving your throttle, if you keep it in any one position for too long you are likely going to overshoot what you were aiming for.
-
2
-
-
On 2/27/2021 at 5:36 PM, MagicSlave said:
Ah, okay, I understand. Thanks for the answer!
It is to prevent low effort clones where people just take the dll.
The tools to update the protection for the files are all on the repo so if you are willing to rebuild the dll you can modify it easy enough.
The empty tanks are on our radar and it's something that will be added before the official release.
-
2
-
-
On 2/20/2021 at 3:48 PM, Doc3908 said:
The radio certainly works, but...
1. You have to tune to the appropriate frequency (e.g. carrier) - if you don't, then easy-comm does nothing when in the air.
2. As seen in my video above, I contact the carrier and call "See you at 10". I am advised to contact the tower, which is usually automatic when I am close to the carrier. However, from time to time, I fly past the carrier and nothing happens (as was the case in the video). I even called "see you at 10" a second time and was, once again, advised to contact the tower, but there's no way to initiate such communication (that is a Supercarrier issue).
3. TACAN and ICLS do not work with Supercarrier. The A-4 works fine with land-based TACAN stations and, apparently, with Stennis (haven't tried myself yet). But I have never gotten it to work with any of the supercarriers.
4. TACAN apparently also doesn't work with AAR tankers.
You don't actually need to tune the radio with easy-comm's on, you just need the radio on. Currently easy-comms will set the frequency however the display will not update. I recommend flying without easy comms though because the radio is fully functional.
TACAN is a workaround and doesn't hook into the CockpitBase code the same way the radio does. Unfortunately although completely possible to reverse engineer the TACAN, it is not possible to create an instance of the TACAN meaning the only way to create a TACAN device would be to write your own which would require the header files from the SDK. Which of course we do not have.
ILS can be hooked similar to the radio, however one cannot tune the native ILS device to the carrier frequencies. So there is no point in replacing the existing workaround we have anyway.
-
1
-
-
6 hours ago, T-Pap said:
I have an issue with the latest version. When being hooked up to the catapult, the pilot suffers a blackout for 4-5 seconds as if experiencing too many G's when the hook is attached .
6 hours ago, Doc3908 said:Yeah, I've seen that too - sometimes you black out for 1-3 sec, sometimes it's a red-out. Usually happens when I give it full throttle to push the pin into the cat. But full throttle or not - it takes a while (working the throttle back and forth) to finally get hooked in. I wonder if anyone has a "recipe" for doing it right. Still, this is a beta version - I'm sure these little hick-ups will be cleaned up by the time the official version is released. Given how complex and accurate this model is and how much work the developers have put into it, I'm amazed they are graciously gifting it to the rest of us for free. As they say, "Don't look a gift horse in the mouth".

Yup this is a known issue.
-
3 minutes ago, Doc3908 said:
Good tip - I think I have the S-3 going at 320kts now, which is a lot. By the way, I think the trigger collider (the graphics component, which detects collision) on the basket is a bit misplaced: You have to aim the probe just above the basket and then it snaps in. If you aim for the center of the basket, it doesn't connect. Could be just my perception...
I think you just missed underneath.
-
6 hours ago, Speedbrake said:
Already have C++ installed.
Check the A-4E-C/bin folder for a A-4E-C.dll if it isn't there then that is why.
-
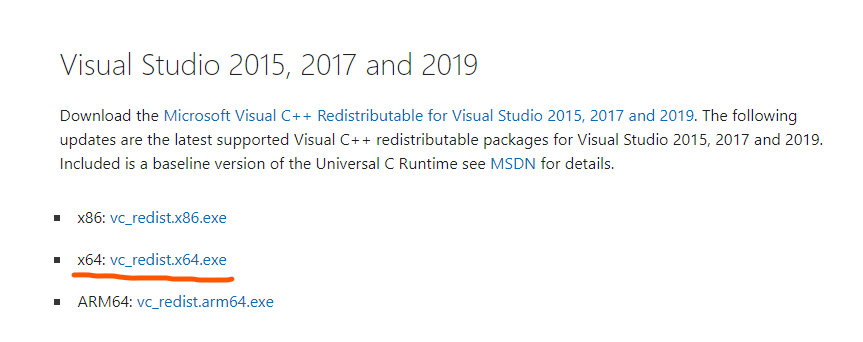
1 hour ago, Copprhead said:
Install c++ redistributable https://aka.ms/vs/16/release/vc_redist.x64.exe
Let's not link directly to exe files please.
https://support.microsoft.com/en-us/topic/the-latest-supported-visual-c-downloads-2647da03-1eea-4433-9aff-95f26a218cc0
-
1
-
-
2 hours ago, joey45 said:
He dose say 'hornet ball' so I guess the LSO thinks it's a hornet.
2 hours ago, Eldur said:Kinda weird to see the indexer showing the AoA a little low while the LSO is saying "You're a little slow" - I mean, flying the amber donut would make you even more slow. Probably he still is "tuned" for the Hornet. Anyway, was nice to watch the landings while I still struggle to stay on-speed properly when approaching land bases. The thing really loves to ballon if you don't correct the throttle just about right. There's a lot of delay in between the input and RPM change and the actual attitude change, really something to master here. The Hornet feels like a child's toy compared to that as it's much more responsive even with the weird Jumo 004ish spool times
This is actually the same with all modules at the moment. The LSO is calibrated for the hornet's speed/aoa.
-
2
-
-
Report any defects here: https://github.com/heclak/community-a4e-c/issues
-
4 hours ago, Eldur said:
Oh, great - thanks! Almost thought I was wrong somehow, but I'm glad we sorted this out, improving the awesome mod even further
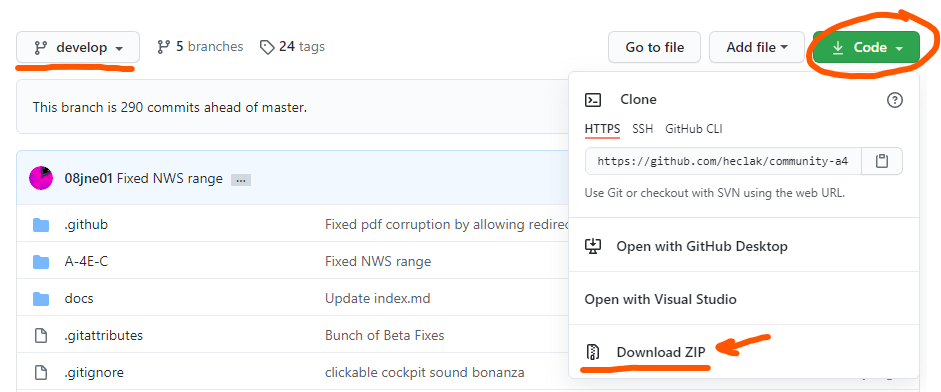
I just need to know how to update the install from the repo then, but I guess it comes down to replacing certaing files
Make sure you are on the develop branch. Then click code and click download zip.
-
1
-
1
-
-
28 minutes ago, Eldur said:
Then the code is doing it wrong, simply put. My Windows control panel registers the axis movement completely, DCS registers the axis movement completely, but only the A-4E-C does register just the upper half of it. I tried different axes, devices, with and without UJR, it's literally acting the same in any condition.
You are right, somewhere my axis calibration got screwed up. For some reason in DCS it was mapping my pedals perfectly from 0% to 100% instead of -100% to 100%.
I'll commit a change tonight if you wish to get the fix. If you don't want to get it from the repo then it will be in the next beta. Thank you for spotting this one.
-
1
-
2
-
-
24 minutes ago, Copprhead said:
It's displayed but the ball in the overlay is not showing the correct glide path, just like the LSO is giving wrong instructions. The ball on the physical IFLOLs on the carrier is showing correct glide path though.
As said, it's a known issue for F-14 as the SC expects a Hornet. So A-4E is most likely affected as well. It's nothing the aircraft can fix, it needs to be fixed in the SC module.
BTW the module is a true masterpiece.
Are you talking about where it overflows if you are too high or low? Because I have noticed that in the hornet too.
-
8 minutes ago, Eldur said:
Yes, all fine in axis tune. BTW I do use UJR as a workaround currently with the brake axes mapped to my stick's slider and the respective toe brakes combined. So my pedals do 50% each and the slider on my stick base does the other 50% for both at the same time. With that, having the slider forward (which is the 0 position), pushing the pedals does nothing (but the axis tune thing goes exactly to the center). If I then pull the slider back and don't push the pedals, it's exactly the same. Only with the slider pulled back, pushing the pedals makes the plane start braking, which also shows directy in the footwell as the virtual pedals start moving just then.
So in other words: The axes mapped range from -100% over 0 to +100%, but the brakes only apply in the range from 0 to 100%. The -100 to 0 range acts just like a deadzone without having one set.
This must be something to do with your setup, as in the EFM code all that is ever received is 0-100% signal. Unless I fully come off my pedals then it jumps to -100%
-
3 minutes ago, Eldur said:
The toe brake pedals in the cockpit literally don't move at all with the first 50% of input. If I recess their maximum range via the saturations sliders (think it was the Y one) down to 50, they don't work at all. Axis tune just shows your controller input versus the calculated input according to the curve set, not what a module makes out of that. I'd love to check RCtrl+Enter though, but the A-4E-C doesn't seem to have that feature (yet).
Does the behaviour mimic mine in axis tune? Because I checked last night and although it looks strange it is smoothly increasing from zero to 100%.
-
2 hours ago, Copprhead said:
I've heard the F-14 has the same problem for this reason and also that the IFLOLS overlay is not correct for everything but a F/A-18.
IFLOLS comes up for me without using radio for both regular and super carrier.
-
3 minutes ago, Eldur said:
Well, in my case the brakes only start reacting when I input more than 50% of the axes.
But I absolutely didn't know that beta-2 dropped and when that happened. I'll see if that changes the bahaviour.
I tried disabling the stick, but VR controllers still grab it even if it's invisible.
Regarding the speed, I must have done something wrong or just had a bad machine the first time when only reaching 450ish. I remember the RPM were capped at around 92-93% that flight, for whatever reason. Didn't actually see that as an issue since the F-5E for example also doesn't go up to 100% in MIL. I was also able to reach the 550 you mentioned in following flights which is a lot better and pretty close to the 585 I had in mind.
One source: https://www.flugrevue.de/klassiker/leichter-kampfjet-douglas-a-4-skyhawk/ (1085km/h is around 585kts)The same "585kn" is given at wikipedia, sources given there are McDonnell Douglas aircraft since 1920 : Volume I pp. 477–498 and Global Security : A4D (A-4) Skyhawk, even stating 586kts with a 4000lb bomb load. I don't have the book source though and the other one doesn't specify the A-4 variant the data is from. I've seen 1108km/h with a quick google though for the M which has the same stronger 408 engine with 50kN thrust. The speed with a bomb load could be related to that actually.
Yea the 408 has almost 7 kN of thrust more than the one modeled. The engine modeled is a J52-P8 with 43 kN of thrust.
The brakes are just really bad, so perhaps you are just not noticing that they are engaging before 50%. You can see if they are working by looking at axis tune. As soon as I touch my pedal it jumps to 0 and then increases slowly to 100%. When I let go it jumps to -100%.
-
1 hour ago, Joe1978 said:
It seems that the problem is going to be related to the AFCS. Discarded fuel tanks
Terms; Stable flight, (some adjust with vertical trim), only AFCS "engage" (altitud and heading selection OFF), air speed; all range.
1. You start a quick turn, you can feel like the system wants to "return" the plane to the starting position.... ummm not sure if it´s OK (remember; altitud and heading selection OFF)
2. You keep forcing the turn and ... bingo! the rolling begins. The tail rudder moves itself (AFCS system ¿?). I release the stick but it seems that the AFCS is going crazy putting the plane into a wild spin.
3. You regain control (stick) but the plane keeps trying to turn on itself uncontrollably.
I have some really funny tacview files.
In reality, I doubt that the AFCS with an intentional change of direction or altitude, blocked due to this effect.
CONTROL STICK STEERING (CSS) MODE
The CSS mode provides for longitudinal and lateral control of
the aircraft through the AFCS by pilot movement of the stick as
in normal flight. This mode is engaged regardless of other
modes selected. Preselect heading and altitude hold modes are
disengaged by use of CSS and they must be re-engaged to be
used again. The AFCS reverts from CSS mode to either attitude
hold or heading hold mode when pilot force on the control stick
is reduced below 2 pounds. The aircraft is controllable in all
attitude in CSS throughout the AFCS flight envelope, which is
4±½ positive-g, 1½±½ negative-g, and one-half aileron
deflection left or right. If these limits are exceeded, the AFCS
disengages.AFCS Engage means you have the autopilot enabled.
This will be default to AFCS Attitude mode, where it will hold the pitch and roll for when it was turned on. If you move the stick from centre (2lbs in the manual) more than 3% (15% by default for FFB sticks) it will go into CSS mode. In CSS mode the AFCS will trim for g. Once the stick is returned to centre it will drop back into attitude mode.
If you force the AFCS to disengage while it is trying to roll it will disengage with that trim setting, this is a discontinuity because this is a flight sim, in reality the stick would be in your hand so this would not be an issue but in game this presents as suddenly rolling. I've mitigated some of this by making the AFCS reset the aileron trim if you disengage it by doing more than 50%, but it does not reset for +4 or -1.5 g disconnects.
-
8 hours ago, Joe1978 said:
With piston engine airplanes I understand that effect (although EMO in DCS is quite pronounced). As for the F16, I have flown it little but I have never had such an exaggerated tendency to rotate on itself as with the A4e
I or non of the 15 something testers have experienced this. Can you record a track and submit a bug report. I suspect this is likely just your controls.
https://github.com/heclak/community-a4e-c/issues
The acceleration and speed are accurate as well as the instantaneous and sustained turn rate. This actually has physics unlike the SFM so stores will cause drag and add weight.
-
20 hours ago, Devil 505 said:
I thought the same thing, but I still had to tune into the carrier frequency to get in contact with the Tower. Also make sure you are in T/R+G mode. Here is a video I did today flying the newly installed EFM model with my PIMAX 8K. LOVE it. Absolute blast in VR. They still need work on comms with the super carrier such as calling the ball, but it still works a lot better than it did before. Another thing I noticed was when taxing up to the CAT, when the deck crew gives the signal to accelerate forward, you have to rock the throttle a little to get her hooked in. There is also an issue where the pilot reds/blacks out when hooking up to the CAT. The only other issue I have noticed and it may be my flying, is when I touch down on the deck and catch the wire, the nose will shoot into the air at times. Please watch the video below on the first trap and let me know if I am to fast or coming down to hard. Not sure if this is pilot error or a bug. Keep up the amazing work. Really loving this aircraft. I will post a night flight here soon using ILS on the carrier. I expect it to be just as scary as the F-14 with all the red lights.
Stop holding the brakes

All the comms for the carrier should work. For easy comms to switch frequency you must first call someone this is how it works in all modules. I recommend disabling easy comms and then using the radio as expected with the radio PTT.
On 2/12/2021 at 11:07 AM, Eldur said:(Controls completely redone from scratch here)
I noticed the toe brake axes are literally dead in the first half and ED's axis manager doesn't allow me to compensate for that as I'd need the 4th slider there to fix it myself. It's usually a range definition thing (goes from -1 to +1, but only should be from 0 to +1).
Also the joystick mapping for toggling the hook doesn't work, but the keyboard one does. The definition within the luas is different, so I just took over the one from the keyboard file for now.
The FM feels great already. But the Scoots seemed to be a bit slow and underpowered to me. Wasn't getting anywhere close to the 585kts on the deck I've seen for the E model. Limit was somewhere between 450 and 500, but I might have done something wrong, just did a single flight so far. At least I didn't have any brakes, spoilers or flaps sticking out for sure
One thing that bugged me multiple times though was the VR interaction with the damn flight stick. When trying to manipulate some switches in the center console (weapons stuff), I accidently grabbed the stick a few times with the controller which immediately pulled the thing to the far right and pushing it forward at the same time. The grab point seems to be at the upper right corner somewhere at the front of the thing instead of being centered somewhere where the actual grip is.
At this point I'd also wish for ED giving us an option to disable stick/throttle interaction with the controllers.
Ignore what the preview says, the brakes are indeed mapped to the full range. Check the beta-2 for a bunch of fixes including the fix to the hook bindings. You can disable the stick by clicking at it's base.
As far as drag goes I can get it up to about 550 kts completely clean at 50% fuel at sea level. What is your source for 585?
-
11 hours ago, 71st_Mastiff said:
Now I have rebind everything!!!
That indeed would be the effect of deleting your controls. If you don't want to rebind everything the version 1.4 scooter is still downloadable.
-
2 minutes ago, kirk7312 said:
I don't know if here is the place to report issue.
I found two issues.
1) It cannot connect with the Tacan which is set with carrier and portable Tacan device.
It works perfectly with the Tacan set in the airfield.
2) Autopilot doesn't work with FFB2.
it cannot hold alt if I use FFB2. It seem reset the trim when I set hold alt on.
-
1
-

Are there any guides or tutorials for making a custom flight model?
in How To Mod for DCS World
Posted
Don't forget the A-4E EFM : https://github.com/heclak/community-a4e-c/tree/develop/A-4E-C/ExternalFM/FM