Roadhouse
-
Posts
11 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Roadhouse
-
I had an issue where meta had installed some virtual display or some dopey thing that needed to be removed in order for the output to be sent to the Pimax. Take a look in device manager and you may see a meta display that should be disabled or deleted. I struggled for hours with this until I used Pimax Play "Troubleshooting" under "General" Hit start and under "Video Card Driver" if it says anything other than "Nvidia"... that's the problem. At least it was for me.

-
Yeah at first I thought they must have sent me a Super standard. Says ultrawide engine in play... Seems barely wider than my OG. Overall it is a significant upgrade from the OG, but I was really hoping for a lot more FOV. Would like to see if this Lab big FOV option can help any. And of course in typical Pimax style, I had to put tape on something on day one. (Covering one of the cameras fixes the god awful tracking).
-
I just received my Super 50PPd Ultrawide. Honestly I can barely see any more FOV than my OG Crystal. I haven't measured it yet, and I guess its probably only 30 degrees more at best, but I was hoping it would be more noticeable. Clarity is much better, but I guess I was hoping for the old Pimax days of big FOV. I do not have this Large(Lab) FOV option in play. Maybe it was taken out of the latest version or maybe it isn't available for the Ultrawide engine? Otherwise still getting things tuned but overall I agree with everything oCMANo said. I had really gotten used to the smoothness of the OG at 120hz locked at 60. 4090 had no problem with that. I guess I need a 5090 and try to get it as stable as possible at 90 now? Half rate at 90 seems a little low regardless of rate stability. Edit: This thing DEFINITELY needs a lighthouse face plate. Unless I'm doing something wrong, the tracking is fine until it isn't. And then its terrible.
-
I must be doing something wrong. Followed all the instructions, but SimShaker seems not-so-great as compared to SimHaptic. I'm using the beta with the Corsair profile. There is no variation in feedback from the motor with changes in throttle position or RPM. Overall all of the shakes seem pretty weak, even cranking them up to 100 and enabling boost on the sound module. Things like gear and flap movements are just a couple of quick blips rather than a constant vibration during travel. Gun shakes are too tame. Stall is way to tame. I think I need to either find a profile or start making my own with .wav files. Andre has a thread on the forums here I may hit him up there and see what I'm doing wrong.
-
This is very helpful thanks. I never did really get dialed in when using SimHaptic, and I'm just getting started with SimShaker now. Do you have values in SimShaker you like for the Corsair you can share? As for setup directions, are you referring to SimShaker's directions? FFB stick and possible rudders are on my list too.
-
What does your shaker hardware consist of? I'm using Ushake6. Downloaded SimShaker and got it running with the sound add on module as Spidey002 suggested. Haven't done much testing/tuning yet.
-
I'm using SimHaptic and now stall seems to come on way to early and some times due to certain engine settings. I've got a thread started on their discord about it. I agree initially when the module came out there didn't seem to be any stall haptic coming through, but now it's going off all the time. I wonder if this is related to this:
-
I have to agree that the new pilot in the mirrors is goofy looking, and in VR at least, has angle and latency issues. Would be nice to be able to turn it off.
-
That's awesome! Much more refined and authentic. What are you doing on the electronics side?
-
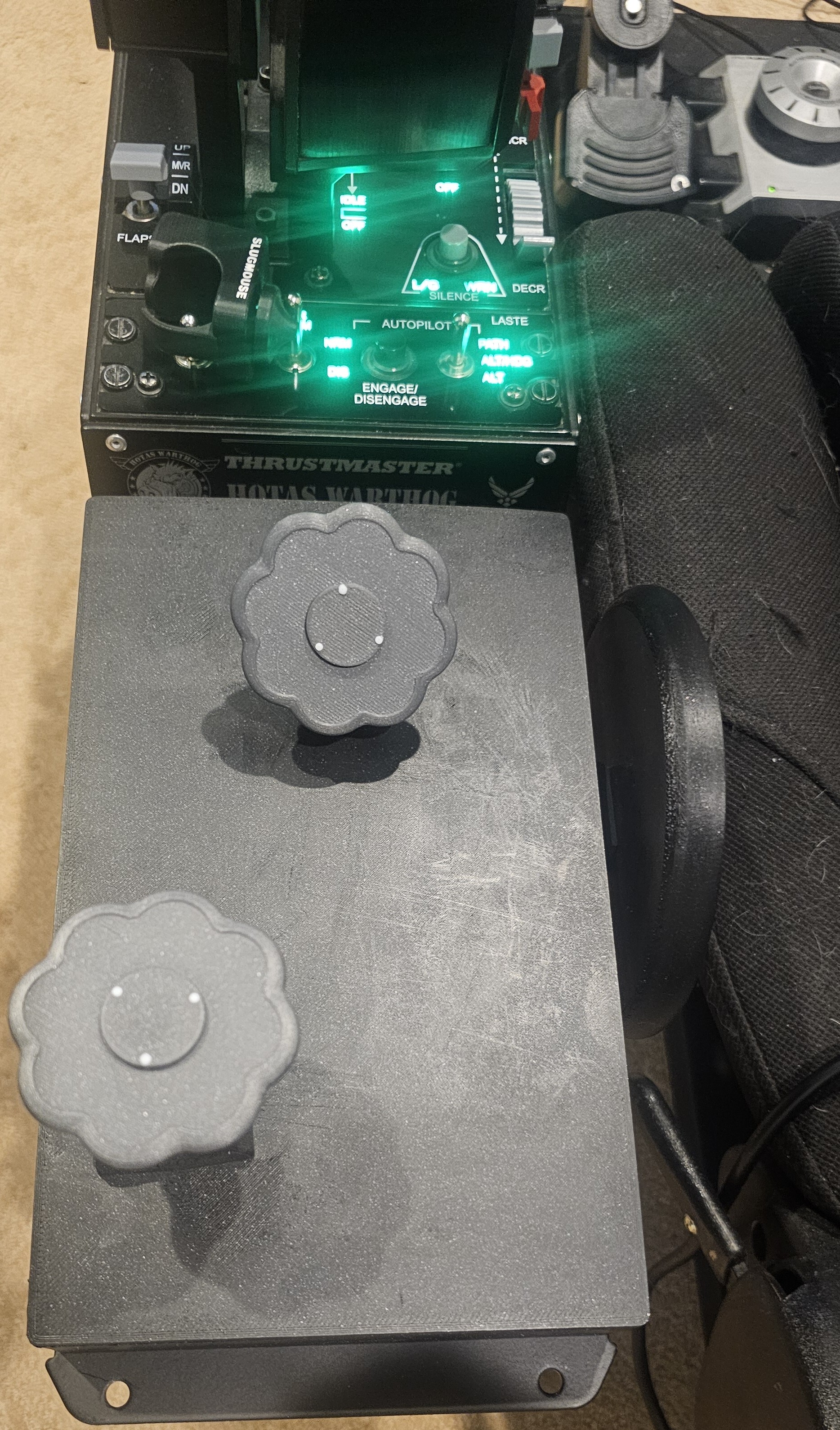
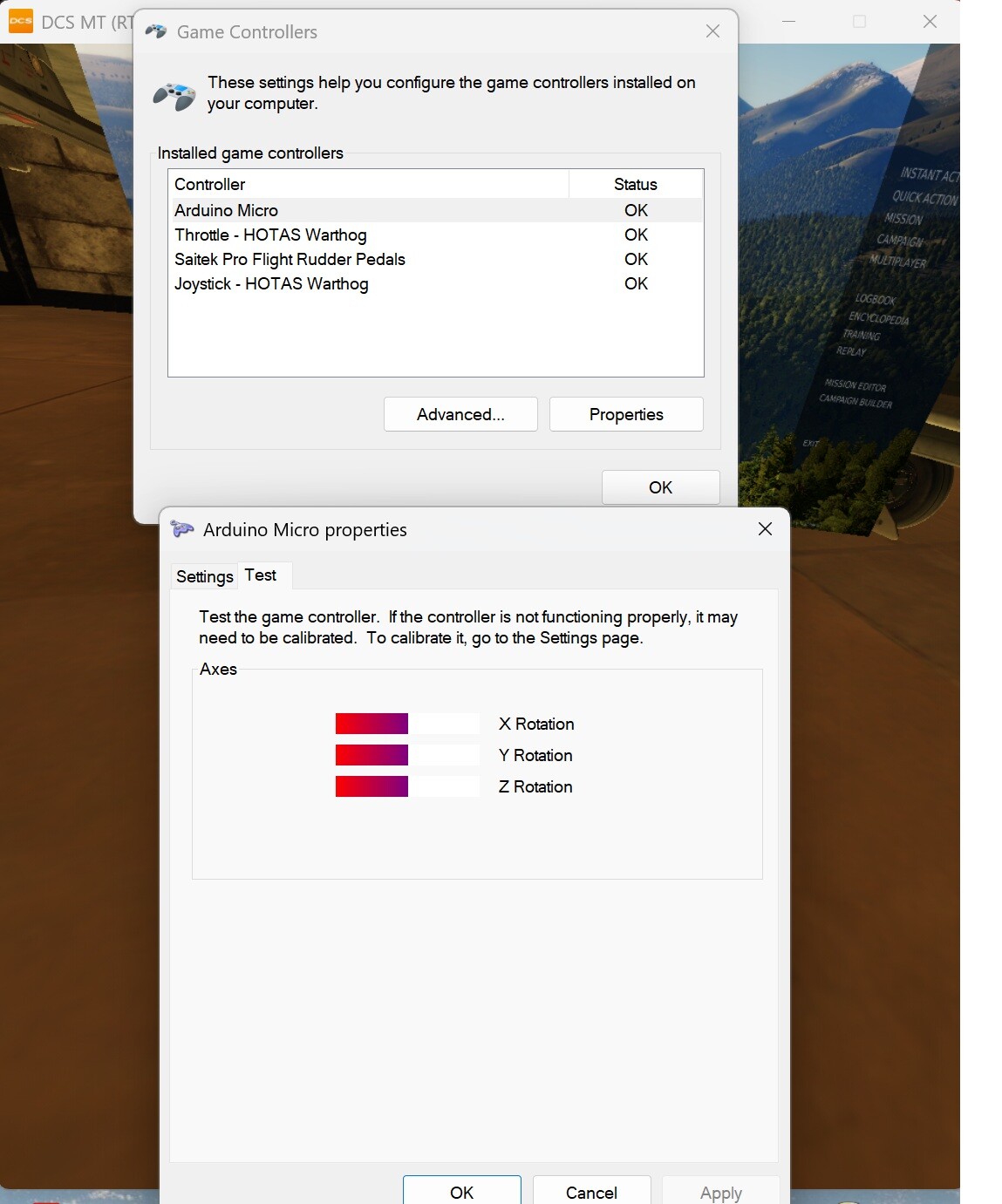
Corsair is the first warbird I've gotten serious about, mostly been flying the Hornet. I found mapping the Corsair trims to hat switches felt less than ideal, so I decided to cook up some trim wheels. This uses three B10K rotary linear potentiometers ($10 for a 10 pack on Amazon), an Arduino Micro ($23), and the parts were printed out of PLA (less than $10 in filament), USB micro to type A connects it to the PC. I drew the wheels and box in CAD, had ClaudeAI help with the Arduino code and now I have a functional set of trim wheels, each assigned to an axis. null The wheels turn more or less the same amount as the wheels in the virtual cockpit, and placing it behind the throttle means my hands are pretty much where they show up in sim (using leap motion hand tracker). I don't know how long these cheap pots will last, but they work well now and the code filters out noise so they generally do what they're told to do. This is a first prototype, so its still a little janky. The neoprene pads around the wheel stems are there to increase friction. Working on a more elegant, internal solution. The wheels are a little smaller than the real wheels, next set I will make a little larger and may print them out of transparent polycarbonate. They are unmarked as I am always in VR, but putting position markers on them wouldn't be hard. Considering putting a tailwheel lock on a future version too. Sharing this just to see what other ideas people have to improve upon it, and I'm happy to share the CAD, code, and wiring if anyone wants to build something similar. This works for the P47 too and a similar setup could be adapted to pretty much any warbird.
-
Stumbled upon this and thought it could be useful. Cannot verify its authenticity and it doesn't appear anywhere else that I've found. https://www.ibiblio.org/hyperwar/USMC/Boyington.html Much of it is fairly high level combat airmanship stuff. Of particular note is multiple references to Zero's using split-S to separate. Perhaps something to implement in the AI as the Zero model is developed.