Lidozin
-
Posts
52 -
Joined
-
Last visited
-
“It ain’t what you don’t know that gets you into trouble. It’s what you know for sure that just ain’t so.” — attributed to Mark Twain
-
"At last the Mouse, who seemed to be a person of authority among them, called out, “Sit down, all of you, and listen to me! I’ll soon make you dry enough!” They all sat down at once, in a large ring, with the Mouse in the middle. Alice kept her eyes anxiously fixed on it, for she felt sure she would catch a bad cold if she did not get dry very soon. “Ahem!” said the Mouse with an important air, “are you all ready? This is the driest thing I know. Silence all round, if you please!" Now I can rest easy and carry on exploring the new module, pausing from time to time to see whether its flight model is really quite as ‘monstrously far from the original’ as some would have it.
-
Is it IAS or TAS you are discussing about ?
-
At a fixed manifold pressure (and mixture), engine shaft power generally rises with RPM and peaks at the maximum permitted RPM. Accordingly, thrust power at the propeller, Pthrust=ηp Pengine, is also maximized there. However, in some cases a small RPM reduction (with a constant-speed prop) can increase net thrust power if the drop in helical/tip Mach moves the blades out of the transonic regime and boosts propeller efficiency enough to outweigh the modest loss in engine power. This is more likely at higher altitudes and higher true airspeeds, where the speed of sound is lower and tip Mach numbers are higher.
-
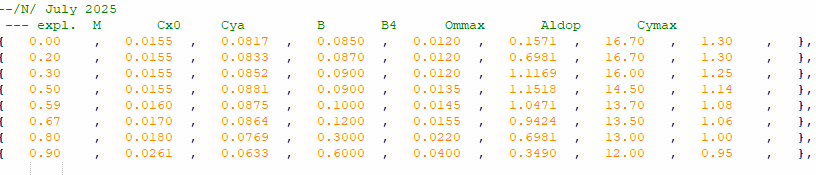
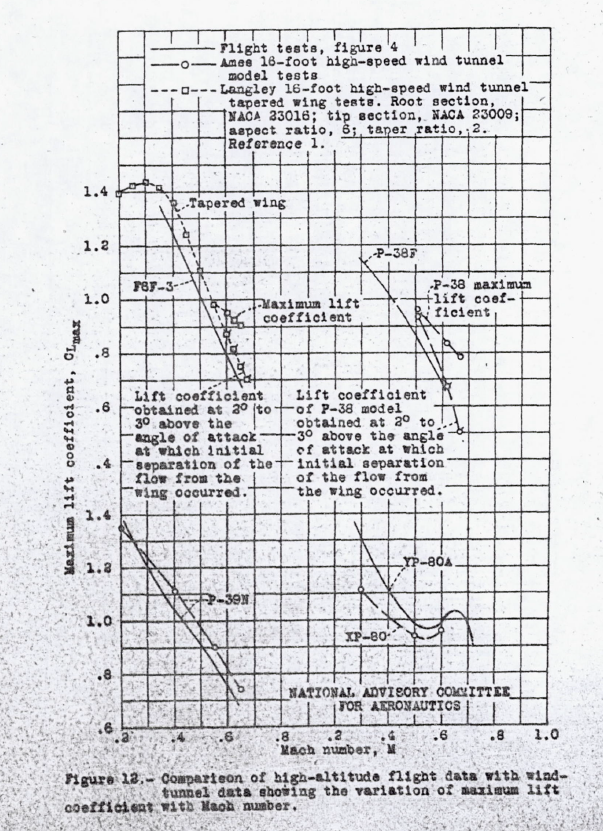
The AI “breaks the laws of physics” only to the extent that the input data it is given contradict the laws of physics and basic common sense. For example, take the AI’s data set for the F4U-1: A zero-lift drag coefficient CD0 of 0.0155? Even the P-51 Mustang did not achieve such a figure. CD0 of 0.018 at Mach 0.8 is pure fantasy for a straight-wing aircraft — as is a maximum CL of 1.0 at M=0.8. Such numbers are physically unrealistic because straight wings experience strong compressibility effects as they approach transonic speeds: drag rises sharply, and the maximum achievable lift coefficient drops well below subsonic values. Assigning these “perfect” transonic coefficients effectively gives the AI a wing that defies real aerodynamic limitations. The value of the induced drag quadratic coefficient in this data set is more in line with that of a low–aspect-ratio wing, such as on a MiG-21. A value of 0.09 is far from what an aircraft with a straight wing of the Corsair’s aspect ratio should have. What’s fed in is exactly what it flies with. This is data from a well-known U.S. NACA report, showing the variation of maximum lift coefficient (CLmaxC_{L_{max}}CLmax) with Mach number for several aircraft types and wing configurations, based on both flight tests and high-speed wind tunnel measurements.

-
Ballistic trajectory. An arrow, for example.
-
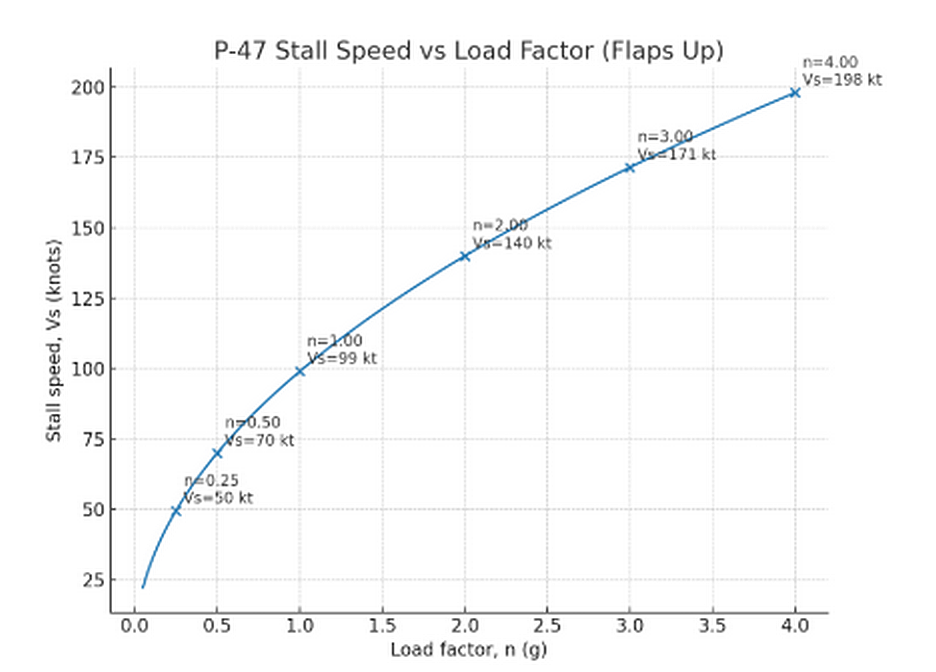
The 99-knot stall speed for the P-47 (flaps up) applies to level, 1 g flight, where the wings must generate lift equal to the aircraft’s full weight. Stall is fundamentally an angle-of-attack phenomenon, not a specific speed. The published stall speed is simply the speed at which that critical angle of attack is reached in a 1 g, steady-state condition. If the aircraft is unloaded — for example, near the top of a zoom climb or during the pitch-over from vertical — the required lift is much less than its weight. That means the wing can maintain the necessary (lower) angle of attack at a much lower airspeed, so you can see IAS values well below 99 kts without stalling. In your example, if the P-47 went pure vertical, then pitched over into level flight, it would be in a near-ballistic or very low-g state for part of the maneuver. In that state, the “stall speed” number doesn’t apply, and the aircraft can regain speed with minimal altitude loss — even with bombs and rocket racks attached — as long as there’s enough initial energy and thrust to carry it through.
-
If the aircraft was flying purely vertically, as described, then stall behavior in the conventional sense wouldn’t be expected — because the wings are not generating lift in the traditional way during a vertical ascent. Stall is a function of exceeding the critical angle of attack while attempting to produce lift; in vertical flight, the aircraft is no longer attempting to balance its weight with lift but is instead relying entirely on thrust and inertia. If, after this vertical segment, the aircraft transitioned into level flight by gradually reducing pitch angle, it would have done so in a partially unloaded state, producing lift below 1g. In that case, as long as it had retained sufficient energy, it could re-establish normal flight once its speed increased above the minimum sustainable airspeed. This sort of behavior — while seemingly unusual — is consistent with known energy-state transitions and doesn’t inherently indicate that the FM is being violated. Additionally, it's worth noting that low-speed unloaded flight (i.e., with load factor below 1g) is actually one of the most energy-efficient modes of flight for propeller-driven aircraft. This is primarily because: Since induced drag is directly related to lift (and increases with the square of load factor), reducing lift demand below 1g sharply reduces drag — especially important at low speeds, where induced drag dominates. Unlike jet engines, piston engines and propellers are well-suited to producing useful thrust even when the aircraft is slow, allowing for continued acceleration or climb, provided excess power is available. When not fighting against gravity with full lift, the aircraft retains more of its kinetic and potential energy, allowing it to convert between the two more gradually — for example, by accelerating in a shallow dive back to sustainable flight conditions. This makes unloaded low-speed flight a perfectly valid and sometimes optimal maneuvering regime, especially when trying to recover from steep climbs or regain speed after vertical maneuvers — assuming the aircraft has sufficient power to avoid settling into an unrecoverable descent. It would also be possible to replicate the same maneuver manually, starting from identical initial conditions. If the aircraft’s configuration and power allow, entering a vertical climb followed by unloaded low-speed flight and gradual pitch-down can result in a smooth transition back to controlled level flight — just as seen in the AI’s case.
-
To verify the claim that the AI has 100% situational awareness and no blind spots, there is absolutely no need for advanced flight testing skills. The procedure takes no more than five minutes: simply enter a known blind zone of the AI—one programmed to unconditionally engage any airborne target—and remain there briefly. Then transition into an area where a human pilot would immediately recognize a threat. This is exactly what was done.
-
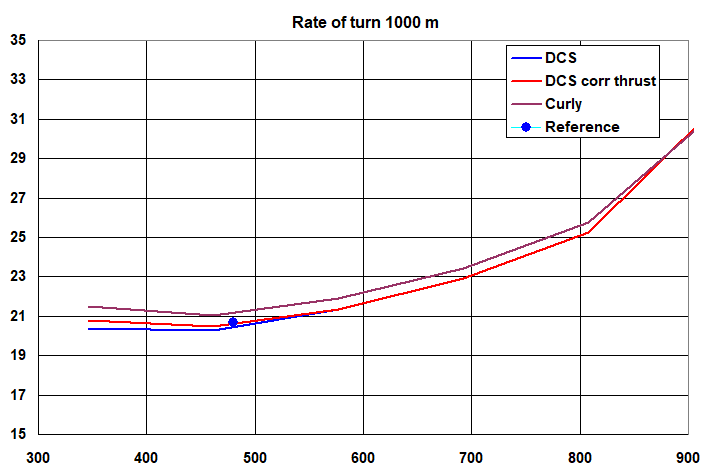
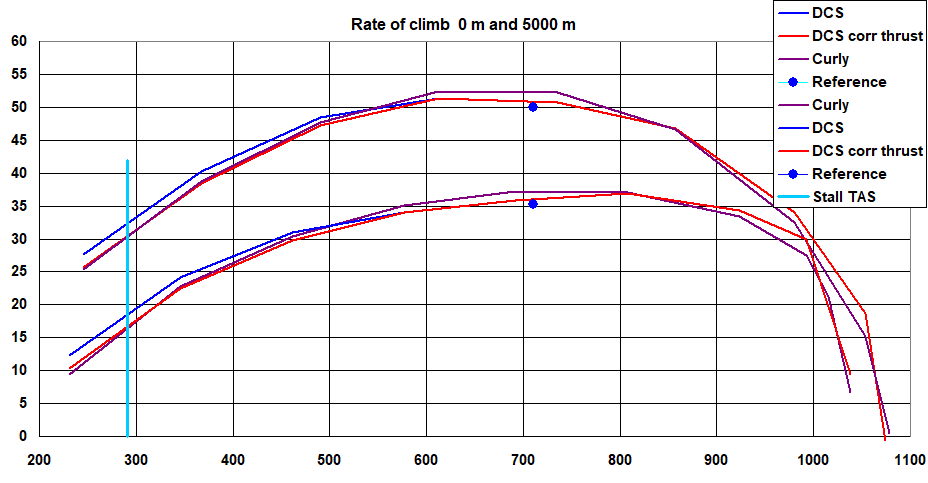
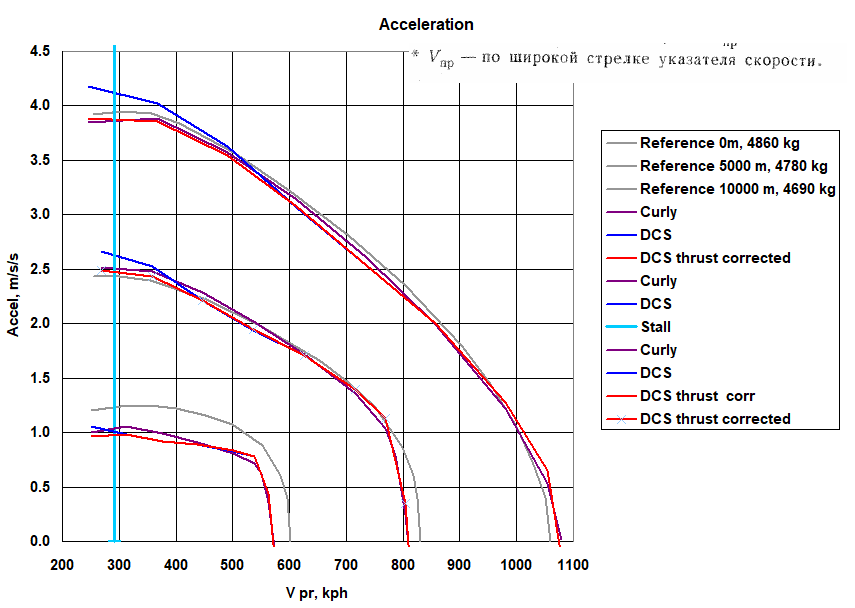
In addition to all else, the video demonstrated that a qualitative comparison of energy performance between AI and human pilots (i.e., “who caught up or overtook whom”) can produce highly variable and non-repeatable results — even when the net energy gain at the end of the maneuver differs by no more than ±5%. As previously mentioned, maintaining position in close formation behind an AI lead is inherently problematic due to its constantly varying load factor. For this reason, it is more reasonable to move toward an analytical comparison of energy performance across three configurations: the default SFM, Curly's mod, and a minimal tweak that adjusts thrust at low speeds to match values from the reference documentation. Setting aside the entirely justified reduction in the maximum lift coefficient (CL or Cy, in Soviet notation), which only affects performance in non-steady maneuvers and may actually lead to slightly better energy retention, we can focus purely on the energy characteristics. We begin again with specific energy rate. The graphs show that both mods reduce energy rate at low speeds; however, Curly’s mod grants the AI an unjustified bonus in the 500–800 km/h range, and at altitudes from 0 to 5000 m — precisely where the aircraft is most efficient in gaining energy. These same modifications also lead to a slight overstatement of sustained turn performance. In both cases, the default SFM data remains a closer approximation of the flight characteristics documented in the reference material. Finally, we consider the graph of longitudinal acceleration vs. true airspeed. Unlike video comparisons, this type of plot could more effectively prompt developers to revisit the model data — since it clearly reveals a discrepancy from reference values at low speeds. One particularly interesting detail in the reference documentation is that the airspeed values on the graphs correspond to raw cockpit instrument readings, not corrected for compressibility effects. For example, at 5000 m altitude, a true airspeed of 1044 km/h would correspond to a corrected indicated airspeed of 809 km/h, while the graph shows 830 km/h — exactly matching the uncorrected table value. This means that deviations of the calculated curves from the acceleration graph at high Mach numbers should not be taken as significant. Returning to the observed change in AI behavior — specifically, when it stops climbing slowly at speeds around 350 km/h — this aligns well with the reduction in available thrust at low airspeeds, as reflected in the thrust curves. It is plausible that the AI logic recognizes the diminishing return of continuing such a maneuver and instead opts for a different course of action.
-
With sincere thanks to Katmandu for kindly providing both the mission and the AI mod data file, I conducted a series of tests using only this mission setup. In these tests, the AI aircraft flew using three configurations in sequence: the default SFM data, the same data but with engine thrust corrected according to the reference curve in the low Mach number region, the data set from Curly’s AI mod. For all cases, the time interval measured was from the moment the aircraft entered a climb by establishing a 1.5g load factor, until it began rapidly decreasing its pitch angle. This time, 58 seconds, was adopted as the reference for both AI and human-piloted aircraft. Since it is virtually impossible for the human pilot to match the AI’s exact initial airspeed at the moment of climb onset, the comparison was based on specific energy height: He = H + V² / 2g, which reflects the aircraft’s total mechanical energy and offers a more accurate basis for analysis. The human pilot followed the AI’s climb profile as closely as possible, keeping the entry load factor below 2.5g and maintaining a pitch angle near 35 degrees. The result was somewhat unexpected, yet entirely explainable: the human-piloted aircraft outperformed even the default AI with increased thrust. This illustrates a point mentioned earlier — that the exact climb profile can significantly affect energy performance and the resulting He gain over the climb segment. While it is difficult to pinpoint the exact source of the additional energy gain, it most likely resulted from a smoother pull into the climb. A more definitive answer would require time-stamped recordings of flight parameters for both AI and player aircraft, allowing for a detailed comparison of dHe/dt during the climb phase. The influence of flight profile on energy climb rate was further highlighted in the final test, where the player attempted to follow the AI in a zoom climb (see video). The result was even more surprising — and again, entirely explainable.
-
As far as I understand, the forum thread was discussing a recording from an online session, since the aircraft names match the nicknames of forum participants. Are there any references showing such large TacView discrepancies occurring exclusively in offline missions?
-
Thanks for the materials! Small modifications to the aerodynamic polars — especially within the low-to-mid Mach range — have minimal impact on overall energy performance compared to relatively larger changes in thrust. That said, it’s reasonable to acknowledge that changes in thrust, and thus in the bot’s energy potential, can under certain conditions influence its combat logic or maneuvering behavior.
-
This is quite interesting, but judging by the graphs posted by Curly, the aircraft's aerodynamics (i.e., the polars), which are solely responsible for energy performance along with thrust, were barely changed in the low-to-mid Mach number region where your test took place. Therefore, in our case, thrust is essentially the dominant factor in energy gain. The maximum lift coefficient, unfortunately, has the opposite effect on energy: if you reduce it for the AI — as was done in the mod based on the reference document — the AI will actually preserve energy better than the default version. Unfortunately, I haven't been able to locate the mod file to try it myself. Would you be willing to share it? If you still have the track from your test, it would be quite valuable to see video of both runs — one using the default data file, and the other using the modified one. In that case, your piloting should remain the same, and the AI’s trajectory should presumably change. And, by the way, how can I make the AI perform such a maneuver in a mission?