molevitch
-
Posts
532 -
Joined
-
Last visited
2 Followers

Recent Profile Visitors
13300 profile views

-

Molevich’s Mi-24P pit now on its own Discord
molevitch replied to molevitch's topic in Home Cockpits
Stupid me…. https://discord.gg/FUnfXfzV -
Images and information about my Mi-24P pit-build can be seen here on Discord. https://discord.gg/FUnfXfzV
-
Today’s DCS newsletter mentioned “tunnels under Paris”…
molevitch replied to Barrett_g's topic in DCS: Normandy 2.0
Perhaps it means stuff like this, where the metro lines are exposed to the sky, though still technically “sous-sol”.
-
I am selling this on ebay today. Finishes in 1 hour! https://www.ebay.co.uk/itm/234948213066
-
Oh, ok. Timer is a function which I guess would only affect Loop.
-
Have you tried using Timer?
-
Book is now SOLD!
-
Hi Aussie_Mantis, there is a great video by Wolfpack about setting up trim for Mi-24. Try turning off the Yaw AP before you try lifting to hover. Make sure you are pointing into wind. Cyclic needs to be back and slightly right. Bit of right pedal too. Bring collective up SLOWLY until light on the wheels. Adjust for changes in pitch and yaw, and gradually lift.
-
I am selling a copy of "Fighter Combat. Tactics and Manoeuvring" by Robert L. Shaw, published by Naval Institute Press. The book is in excellent condition and has its original dust cover intact. Published in 1985 it is a definitive analysis of air-to-air combat with historical references dating from First World War through to the modern jet-age with hundreds of real-world scenarios from combat pilots. It has dozens of illustrations of manoeuvres used in combat flying, and obviously has a particular emphasis on the aircraft of the time it was published, relevant to most of the fixed wing aircraft in the DCS World inventory. Bought at a time when I was more invested in the fixed wing modules, I have since focused predominantly on rotary wing aircraft. I spent many hours reading and then trying to apply the techniques described in this book. Please contact me if interested. The going rate for USED copies of this book on Amazon is £30/$36, (postage not included) and I would be asking for a similar price. Serious offers only by DM.
- 1 reply
-
- 1
-

-
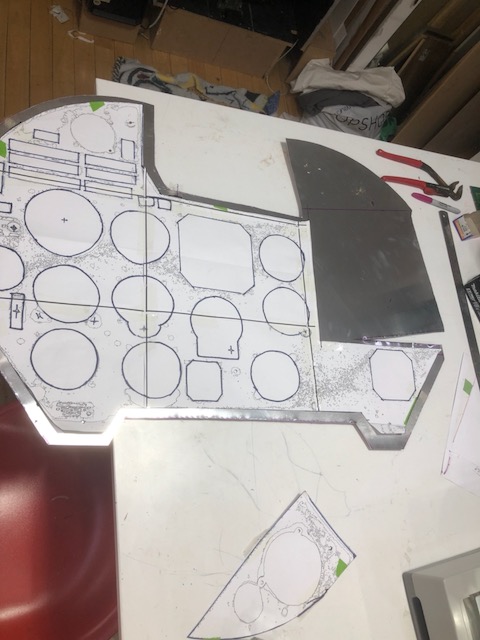
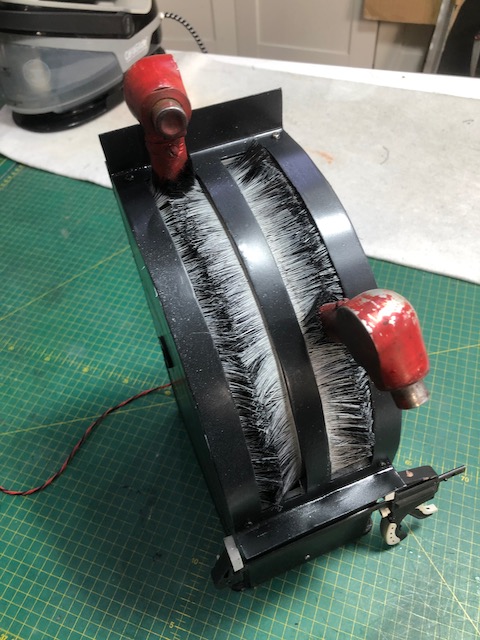
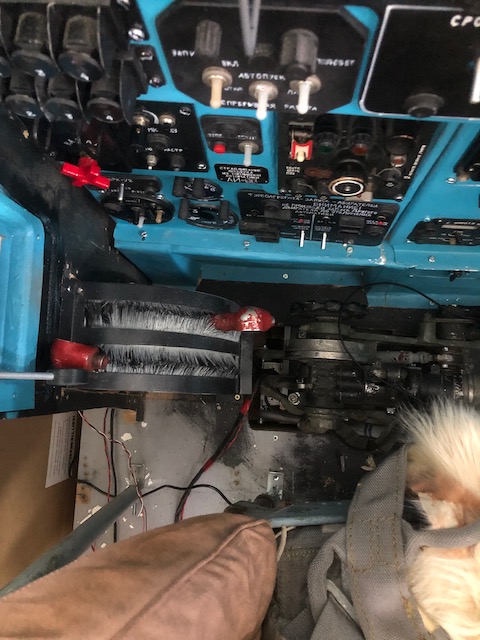
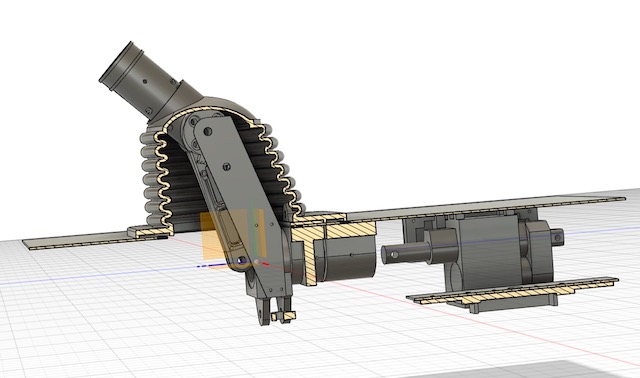
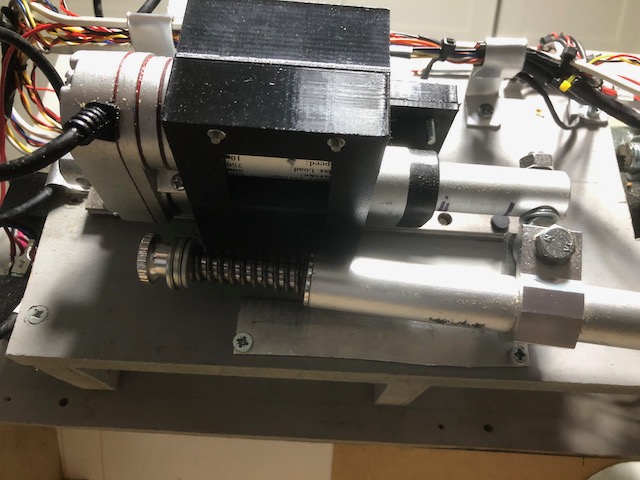
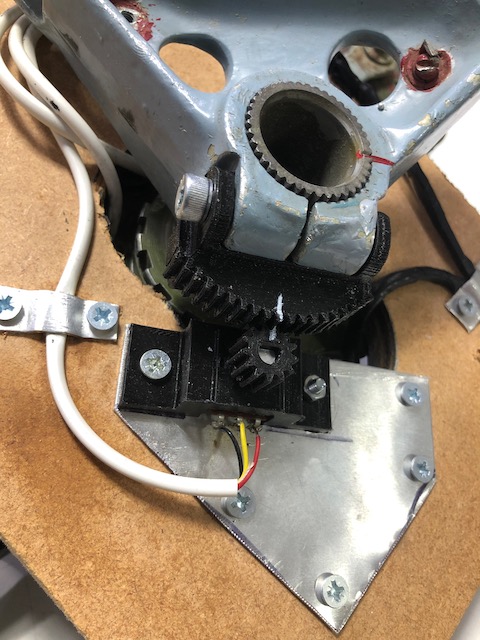
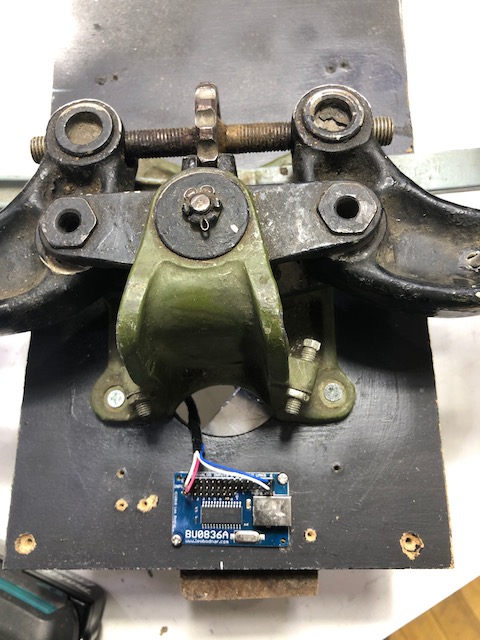
Wow! It’s been a while since I posted here! The year has flown by, and real life has been keeping me busy. But I have still found time to work on my pit with some new developments, and some upgrades to the older parts. Currently working on upgrading the cyclic magnetic brake and trimming system using 3D printed parts to mount linear actuators and electro-magnets, new better quality slide rails, more suitable bearings etc. Modelling the whole thing in Fusion 360, and currently trying to 3D print a flexible boot for the cyclic base. It’s a 24 hour print, so fingers crossed. The gimbal is a mix of aluminium extrusion cut to shape and 3d printed components, and I am following the structure of the authentic Mi-24 cyclic and connectors. A major tidy up of wiring harness and connectors for this is anticipated, with 3D printed mounts for relays, wiring runs etc. An R60 Controller box has been added. Glare shields have been rebuilt using aluminium sheet and massive flat head rivets, Mil pedals have been finally integrated and have functioning micro-switches, and a damper to hold position and control turn rate. Oh, and rotor brake has been implemented too. An authentic JADRO is a work in progress to get it to talk to DCS-BIOS.... The dashboard has been rebuilt and a new Map-Box also to correct some scale errors which were messing up a lot of other aspects.
-
I used to use a ton of Nanos but as my pit project grew, so did the quantity of Nanos, and therefore sketches, wiring, mounts, etc. I now have 9 I!) Megas running the whole pit…. 1 is the master on a RS485 network of 6 Megas and 1 Nano, the other 3 are currently standard serially connected. All Arduino clones from Elegoo, but I did find some bizarre issues with getting them to work when mounted on those handy screw connection shields. So I dumped those in a box and 3d printed my own mounts for the Megas, and all connections are soldered to header pins. All radios are on Megas under DCSBIOS FlightPanels branch. All the other cockpit switches etc are also running the same way. I kept my main controllers (cyclic, collective and pedals) on a Bodnar board because DCSBIOS can still occasionally fall over mid session, usually I find if switching between programs with alt-tab, or something…. Works like magic for the most part. (Though sometimes, as we all know, DCSBIOS can drive me insane for days at a time…) So, which version of DCSBIOS are you running? Where are your Megas from? And, how are you connecting them to DCS?
-
I just turn them on and off, and keep lowest gain. But I have NVG On/Off and Gain Up and Gain Down as Voice Attack commands. Flying in VR too.
-
Hello all. I am hoping someone has some advice on working with DCS-BIOS defineRadioWheel and DCS .lua files using function radio_wheel_1. I have written a sketch for Mi-24P JADRO radio for Arduino which successfully sends correct numbers to SOCAT, and shows them being changed by the dials I am turning. (These are authentic JADRO dials, using analogue binary codes by switches, and the output is being read on the Arduiino using Port Registers). But, I cannot get those numbers into DCS in the sim. The sketch is communicating with the sim, as ordinary multi position switches are working, and activated in virtual cockpit when turned on. So, I am looking for some help with how to get the message and attached integer/character to be read by DCS. The A10C uses a similar radio coding in DCS .lua, so I tried setting up a sketch to use the physical JADRO dials to work with the A10C. Still get the same problem. Any guidance or experience with those radio_wheel_1/defineRadioWheel aspects will be greatly appreciated!
-
Thanks for all your help. I've learned some more about writing sketches and coding. I will talk to BlackLibrary/Warlord about it, see what he can suggest. Happy flying/pitbuilding!
-
Still does not work...