
Flamin_Squirrel
-
Posts
2663 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Posts posted by Flamin_Squirrel
-
-
The Hornet and Viper are good examples, but this applies to other aircraft too...
The Hornet radar elevation control is relative. The Viper radar elevation control is absolute.
Depending on each users hardware, a physical axis control will work well for one or the other ( e.g. I have the Winwing throttle with a spring loaded to centre elevation control which works great for the Hornet, but not so much for the Viper).
Could we have an option, maybe under the special options tab, where we can change from one form of control to the other?
Thanks.
-
I have the Winwing throttle, where the radar elevation control is spring loaded to return to centre. This works great for the Hornet of course, as elevation control in the Hornet is relative.
The Viper elevation control in DCS is absolute; this is of course correct as per the real aircraft, but makes using the Winwing elevation control difficult.
Is there any way (e.g. lua or cfg file trickery) that can be used to alter the behaviour?
Thanks.
-
Oh, and not sure about Win 11 insider. I don't know much about it, and I've not signed up for it.
-
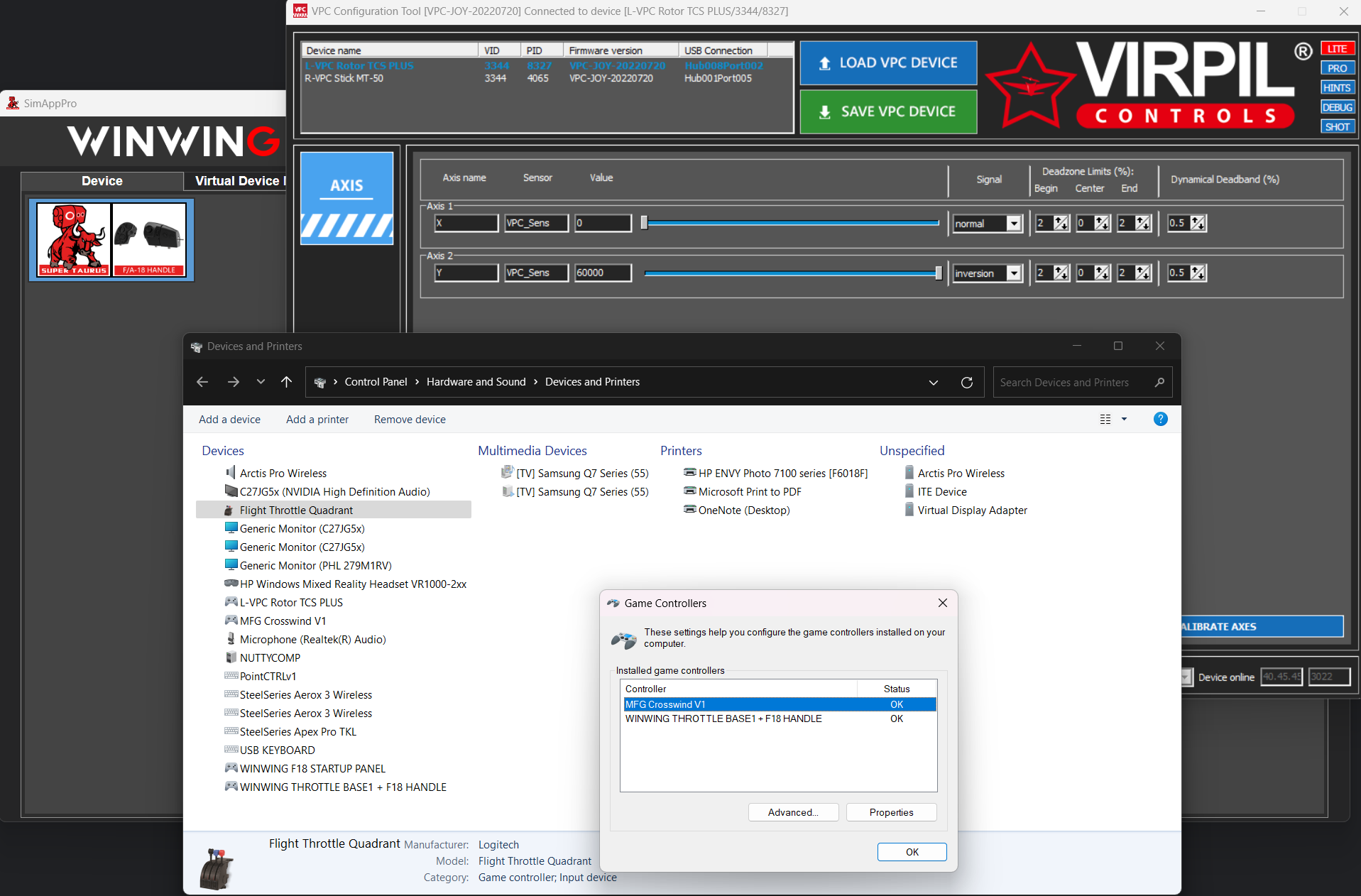
Hi @silverdevil
Regarding Winwing, I can only see the throttle in the SimApp pro software, not the start panel, so that matches what can be seen in windows Game Controllers.
What's more strange is the Virpil stuff. I've never had a device show in the VPC software but not in Windows. Weird.
-
I gave those steps a go, but unfortunately it didn't make a difference.
Thanks for the reply anyway.
-
Hi all,
I've just replaced my PC (where everything was working fine) with a new one, running Windows 11.
All of my peripherals are showing fine as devices but most aren't appearing in the list of Game Controllers.
I have the following peripherals:
- Virpil MT-50 stick
- Virpil collective
- MFG Crosswind pedals
- Winwing throttle
- Winwing startup panel
- Saitek throttle quadrant
Only the MFG Pedals and Winwing throttle show as controllers.
Strange that the Winwing throttle will show, but the startup panel will not. Also strange that my Virpil controls show in the VPC software, but not in Game Controllers.
I've updated firmware to the latest versions where applicable.
Not sure if this is a windows 11 issue?
The only other thing I can think of is possibly a USB issue. I've tried plugging directly into the back of the PC using different USB ports, again making no difference.
Any help appreciated.

-
INTR WING - (internal wing) transfers fuel to the fuselage tanks when in NORM, and prevents transfer from the wing tanks (or to the tanks when refuelling) with the switch set to INHIBIT.
My understanding is that this would likely be used to manage a wing fuel leak, from battle damage or other. Probably of limited use in DCS.
"EXT TANKS WING" and "EXT TANKS CTR"
External tanks will automatically transfer fuel unless: weight is on wheels, or the refuelling probe is out. Use STOP to prevent fuel from transferring from external tanks, or to stop them being filled during refuelling. Use ORIDE to force fuel to transfer when it would otherwise be inhibited (i.e. weight on wheels, or probe out).
Scenarios when you might want to use these switches:
You have 3 external tanks, and want to use fuel from the wing external tanks first, perhaps so you can jettison them. You could set "EXT TANKS CTR" to STOP, to prevent the centre tank draining, so that fuel is used from the wing external tanks first. You'd then set this back to NORM once the wing tanks are empty.
You need to extend the refuelling probe (maybe you have an impending hydraulic problem) for the remainder of the flight, but still have fuel in the external tanks that you need to get at. The fuel won't transfer in NORM, so you can use ORIDE to force it to transfer. Again, probably of limited use in DCS.
In short, unless you have some sort of abnormal situation you need to deal with, these switches are 99.9% of the time are going to be left in NORM; but at least this should provide some background understanding of their function.
-
 3
3
-
 2
2
-
-
2 hours ago, ApacheLongbow said:
...I really struggle with decelerations: it kills me everytime!
How so, VRS? If so, make shall approaches, and approach INTO THE WIND! It makes things so much easier. I think many sim pilots forget about/don't realise the importance of this, but it really does help.
-
1
-
-

Sloppy technique!
Try taking-off into wind, and accelerate in ground effect until you've gained some airspeed, and you should be fine with high temps!
-
On 4/6/2022 at 3:04 PM, gav88888 said:
Interesting, I did a PG mission last night, 20c and I was fully loaded with rockets and hellfires, struggled to take off and hovering was only possible for a few moments.
Got a track? I expect there are things you can do to make things easier for yourself.
-
27 minutes ago, Caldera said:
Frankly, the thing reacts more like the ball in the turn bank indicator of for example the P-47D than the gyroscopically driven instrument of a modern digital aircraft.
Caldera
That's because it basically is the same as from a P-47!
-
24 minutes ago, Caldera said:
Thanks for all the replies!
In some respects, maybe because of Early Access, I still think this is not exactly right. I get the way a helicopter flies for the most part, but to my mind by centering the Trim Ball it should fly straight to the FPV and not crab. Otherwise, a skid / crab would always be indicated on the Trim Ball. It is a catch 22. Currently it is off by noticeable amount.
And, maybe I am just a rock head...
Could it be the Trim Ball indication that is not quite correct?
To be sure of zero slip you really need an aerodynamic indicator, like a yaw vane or even a bit of string tied to the canopy. For the ball to work perfectly, there has to be symmetrical thrust / drag - which of course helicopters don't have. See example below: string centred in forward flight, ball is deflected left slightly.
-
8 hours ago, nikoel said:
I am going to explain this as simply as possible and avoid jargon. This is due to something called Tail Rotor Drift (which causes Roll) that the poster above has referenced. This can be offset by either the pilot or the manufacturer (by naturally tilting the mast in the opposite direction). We can go into physics and aerodynamics but in the end what you need to understand is that the aircraft in a anticlockwise rotor system will naturally want to hang left skid low
Because of this you will see the ball offset slightly [to the left of centre]. It's a similar principle to what a builders construction level ruler would do when it's tilted to one side. This can be done by either having a heavier or a lighter ball
Therefore when you're in forward flight if you would put the ball in the middle you will be skids level. But remember what you learned above. If you are skids level when the aircraft wants to naturally hang with the left skid low, you're aerodynamically 'flying sideways' (off balance). This will be reflected by a simple string on the nose of the aircraft which will be offset also
Now I have never flown the apache but I have taught on many helicopters; and what I will say is that this effect, at least to me, seems to be extremely pronounced in the AH-64. In the same way that Vortex ring is simulated. In reality it can be very difficult to enter even on purpose
Having no experience inside the Apache, I am hesitant to call this out as unrealistic and over exaggerated until this is confirmed by a real Apache Pilot. But it's certainly a magnitude higher than what I was expecting
I'm aware of all of that. That was my point.
-
Try moving the master volume knob away from "MIN". Shouldn't work, but seems to.
-
27 minutes ago, shagrat said:
Not necessarily as the torque from the rotor is pushing the nose to the right, while the tail rotor pushes against the tail boom adding a bit of drift. You compensate this with tilt of the rotor disc, but to my understanding the equilibrium of all forces results in a vector that's off center. Of course wind influences this and can either enhance it or even negate it. Also any changes to the controls will change it a tiny bit.
You might be right. Lots of forces at play. Just doesn't seem intuitively right to me that it can be, level, constant heading, ball in the middle, and be in trim if it's not heading straight ahead.
-
1 hour ago, shagrat said:
That's the misconception. Centering the ball in an helicopter, unlike an airplane does not mean straight. It shows the torque/yaw is in equilibrium with the actual flight vector, but most of the time they are two different headings.
Get into the Huey, speed up to 110+ kts, center the ball, and go F3 view. You will notice how the direction of flight is to the right from where the nose is pointing.
Now ignore the ball and eyeball the flight path and get the nose pointing to your actual course... You may need to reduce speed to make it work and counter with left cyclic vs. left pedal. That's the same behavior/effect as in the Apache.
If the aircraft is "in trim" (ball centered) it actually flys a little to the right (FPV), but is in "aerodynamic trim", as in optimum airflow and equilibrium of forces (hope I make sense). On take-off, landing, firing rockets, you want the nose pointing to where the helicopter is going, so you align the nose with the FPV and ignore the ball. That is called "nose to tail trim".
Shouldn't the FPM (in a zero wind condition) by definition be straight ahead for there to be zero aerodynamic slip? As you point out in the first paragraph, the ball is perfect when you've got symmetric thrust/drag, but helicopters don't. I suspect the reason the ball is still used is because while not perfect, it's a very simple device, and it's close enough (and the FPM can't be used as it's influenced by wind).
-
12 hours ago, Frederf said:
... traditionally hydraulic pumps are quite non-linear (lose 10% RPM lose half power type behavior).
Not in power hydraulic systems they're not - they're always (at least I'm yet to encounter an exception) positive displacement. Aircraft usually use piston pumps too, which vary volume to provide constant pressure, meaning pump output can compensate for changes in RPM (within reason).
-
8 minutes ago, TheCrysinator said:
I manage to "catch" it at around 86% RPM consistently with a realistic reaction time. As bradmick confirmed you should be able to recover RPM and that's currently not the case. My problem was that low RPM with no feasible way of recovering some leaves you with no headroom at all.
It is possible to recover if you load the rotor by pulling back on the cyclic. Not easy though (especially if you're trimmed forward) I'll give you that.
-
2 hours ago, TheCrysinator said:
That's why I was so irritated by the current implementation. Glad to hear it's WIP.
Based on what bradmick's said it's likely excessive rotor drag that's the only thing wrong. So while the speed at which rotor RPM drops may reduce, the result of you letting it drop will not. Therefore you shouldn't concern yourself about losing power/hydraulics - it's a red herring.
-
18 minutes ago, TheCrysinator said:
I had the time to check again:
If you drop collective immediately after the "RPM low" warning you can still save it but RPM will drop to ~85% and won't recover even with 0 collective.
Don't get me wrong I just want to understand the Apache. Autorotation is easy in every other helicopter (Hind, Hip, Gazelle, Huey, Ka-50) and you have plenty of time to react. But the most modern one of them is unrecoverable if you're reaction time isn't perfect?Don't let the nose drop. Pulling back on the cyclic will load the rotor bring RPM back up. Turning works too, but increases descent rate, so less ideal.
It's not easy though that's for sure.
-
9 hours ago, TheCrysinator said:
I knew when the power loss would occur so I waited a second because anything else would be unrealistic and by that time I had ~75% rotor RPM, no generators and no control authority. I know it's a bad comparison but the Hind/Hip will lose both generators and you still have enough control authority to get it down even if the generators stay out (usually they come back with rotor RPM).
I think you might be underestimating the importance of keeping rotor RPM up - 75% is extremely low. It's also necessary for hydraulics, it prevents the rotor blades from coning up/bending, and most importantly without it you won't be able to arrest your descent at the end of the auto anyway.
Lowering the collective in the event of power loss must be IMMEDIATE. If you let rotor RPM drop below 90% you're probably too slow.
-
The Apache does seem a little squirrely - but hovering is unlikely to ever be easy for newcomers in their first heli and will always take practice. "Just git gud" is a blunt way of saying there aren't any short cuts, which is true to an extent.
That said, there are tips that can help. Probably the best one is understanding that maintaining the attitude of the helicopter is key. To be able to hover means your eyes have to be very sensitive to detecting correcting changes in the helicopter's attitude.
Find a wide flat area, lift off the ground and try to hold an attitude. If you start to drift don't panic, just readjust the attitude a little to try and correct and hold it again. See what happens, and repeat. AVOID LARGE CORRECTIONS!
-
2
-
-
Fair enough! I find it distracting during the day, but I like the idea of using it at night. The slave trick is indeed handy.
Question though, I'd assumed having the PMD as ACQ would have been more important for coordination? Guess it depends on the scenario?
-
38 minutes ago, bradmick said:
Because it allows you stay heads out and easily direct the TADS when it's your selected sight by setting your ACQ to GHS and pressing the SLAVE button. Also, in the real aircraft you can lower a smoked visor to improve the visibility of the HDU. It's not a bug, it's working exactly as intended. If you don't want it in your eye, you rotate it out of your eye and use the TEDAC.
Not talking about removing IHADS completely, just the TADS overlay.
-
2
-
Can't move F2 camera in some modules.
in View and Spotting Bugs
Posted
Hello,
I have issues moving the camera in F2 view in (so far as I've noticed) the A10 and the Hind. I have just about every other module and they're all fine.
It seems like a controls conflict (I get some movement, but it's moves right back like it's fighting against something), but here's where it gets weird: In the Hind, I find the issue can be fixed if I move into the gunner cockpit. From then on it's fine until I either respawn (MP) or start a new mission (SP).
In the A10 there doesn't seem to be a fix.
Does anyone have any ideas?