Flamin_Squirrel
-
Posts
2678 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Flamin_Squirrel
-
 I've raised a ticket. Will let you know how I get on...
I've raised a ticket. Will let you know how I get on... -
Seems this is still an issue.
-
Left engine in flight mode, right in ground mode. The torque values shown on the instrument page are the same (although the bars are at different hights). They look correct on the right MFD though.

-
Ah interesting! Thanks.
-
Hmmm. Tried the mission again. The scenario is a left engine failure. The post mission failure lists a right engine oil leak too, but that remains running for long enough to land at least. I don't get a BUS TIE warning, but power dies after a couple of mins. Operating engine at MIL power.
-
Apologies for a bit of a bump... Single engine doesn't result in insta-death now. However, trying the emergency landing mission on the persian gulf map (in the dark) is made somewhat more challenging by the fact electrical power dies quite quickly. That doesn't seem right?!
-
I'm using WMR.
-
Apologies, should have put that in the OP! HP Reverb G2.
-
ST works OK, but when trying MT my VR headset goes blank as soon as DCS loads (it has broken for me since the previous patch 2.9.6.57650), although I can see the VR image repeated on my monitor. In this case DCS still seems to be running (I can see the mouse cursor moving on the menu screen), but the view is frozen (as in, the view doesn't pan with the headset) and, as previously mentioned, the headset display itself is blank. Anyone got any ideas?
-
Mission 7 - Emergency - Spawn into containers
Flamin_Squirrel replied to Flamin_Squirrel's topic in Oilfield Campaign
Thank you! -
Airboss station... missing?! (VR)
Flamin_Squirrel replied to Flamin_Squirrel's topic in Bugs and Problems
Thanks for the feedback! Unfortunately when trying MT my VR headset goes blank as soon as DCS loads (it has broken for me since the previous patch 2.9.6.57650), although I can see the VR image repeated on my monitor. In this case DCS still seems to be running (I can see the cursor moving on the menu screen), but the view is frozen (as in, the view doesn't move with the headset) and, as previously mentioned, the headset itself is blank. I've attached my dcs log. Many thanks. dcs.log -
As per image below... r
-
Mission 7 - Emergency - Spawn into containers
Flamin_Squirrel replied to Flamin_Squirrel's topic in Oilfield Campaign
No-one? -
Hello, Reflying mission 7, and the FARP pad I spawn on is covered with containers, leading to immediate death. Can this be resolved/investigated please?
-
Less than 24 hours notice (twice?). No forum announcement. No revised date (not that anyone would believe it now anyway). Like others I found out through a third party. I've pre ordered almost everything for the past 14 years, but this is really testing my patience. Abysmal customer relations.
-
Hello, I have issues moving the camera in F2 view in (so far as I've noticed) the A10 and the Hind. I have just about every other module and they're all fine. It seems like a controls conflict (I get some movement, but it's moves right back like it's fighting against something), but here's where it gets weird: In the Hind, I find the issue can be fixed if I move into the gunner cockpit. From then on it's fine until I either respawn (MP) or start a new mission (SP). In the A10 there doesn't seem to be a fix. Does anyone have any ideas?
-
The Hornet and Viper are good examples, but this applies to other aircraft too... The Hornet radar elevation control is relative. The Viper radar elevation control is absolute. Depending on each users hardware, a physical axis control will work well for one or the other ( e.g. I have the Winwing throttle with a spring loaded to centre elevation control which works great for the Hornet, but not so much for the Viper). Could we have an option, maybe under the special options tab, where we can change from one form of control to the other? Thanks.
-
I have the Winwing throttle, where the radar elevation control is spring loaded to return to centre. This works great for the Hornet of course, as elevation control in the Hornet is relative. The Viper elevation control in DCS is absolute; this is of course correct as per the real aircraft, but makes using the Winwing elevation control difficult. Is there any way (e.g. lua or cfg file trickery) that can be used to alter the behaviour? Thanks.
-
Oh, and not sure about Win 11 insider. I don't know much about it, and I've not signed up for it.
-
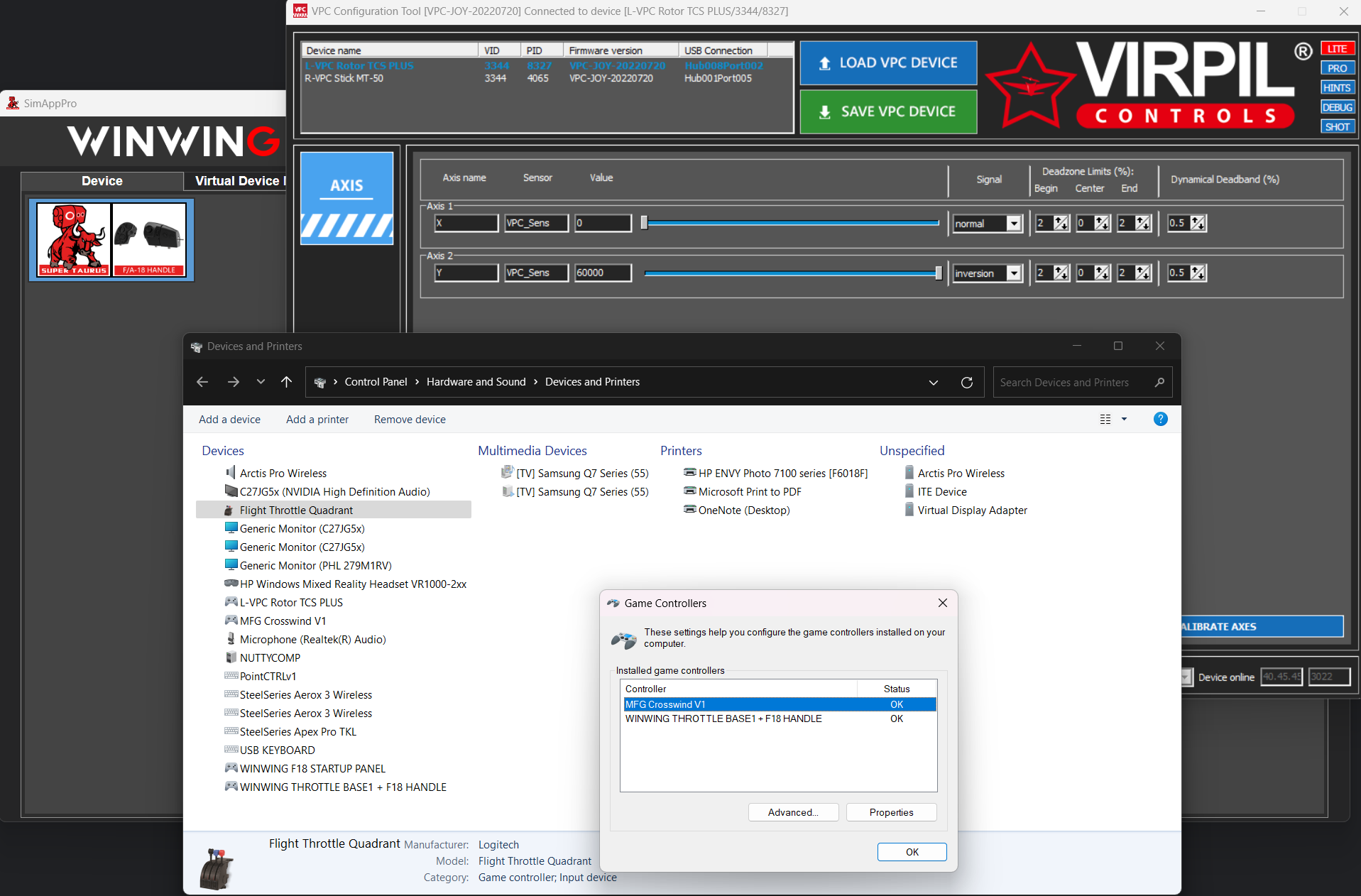
Hi @silverdevil Regarding Winwing, I can only see the throttle in the SimApp pro software, not the start panel, so that matches what can be seen in windows Game Controllers. What's more strange is the Virpil stuff. I've never had a device show in the VPC software but not in Windows. Weird.
-
I gave those steps a go, but unfortunately it didn't make a difference. Thanks for the reply anyway.
-
Hi all, I've just replaced my PC (where everything was working fine) with a new one, running Windows 11. All of my peripherals are showing fine as devices but most aren't appearing in the list of Game Controllers. I have the following peripherals: Virpil MT-50 stick Virpil collective MFG Crosswind pedals Winwing throttle Winwing startup panel Saitek throttle quadrant Only the MFG Pedals and Winwing throttle show as controllers. Strange that the Winwing throttle will show, but the startup panel will not. Also strange that my Virpil controls show in the VPC software, but not in Game Controllers. I've updated firmware to the latest versions where applicable. Not sure if this is a windows 11 issue? The only other thing I can think of is possibly a USB issue. I've tried plugging directly into the back of the PC using different USB ports, again making no difference. Any help appreciated.
-
F18 Fuel system - finer details and operations
Flamin_Squirrel replied to Airbusjoerg's topic in DCS: F/A-18C
INTR WING - (internal wing) transfers fuel to the fuselage tanks when in NORM, and prevents transfer from the wing tanks (or to the tanks when refuelling) with the switch set to INHIBIT. My understanding is that this would likely be used to manage a wing fuel leak, from battle damage or other. Probably of limited use in DCS. "EXT TANKS WING" and "EXT TANKS CTR" External tanks will automatically transfer fuel unless: weight is on wheels, or the refuelling probe is out. Use STOP to prevent fuel from transferring from external tanks, or to stop them being filled during refuelling. Use ORIDE to force fuel to transfer when it would otherwise be inhibited (i.e. weight on wheels, or probe out). Scenarios when you might want to use these switches: You have 3 external tanks, and want to use fuel from the wing external tanks first, perhaps so you can jettison them. You could set "EXT TANKS CTR" to STOP, to prevent the centre tank draining, so that fuel is used from the wing external tanks first. You'd then set this back to NORM once the wing tanks are empty. You need to extend the refuelling probe (maybe you have an impending hydraulic problem) for the remainder of the flight, but still have fuel in the external tanks that you need to get at. The fuel won't transfer in NORM, so you can use ORIDE to force it to transfer. Again, probably of limited use in DCS. In short, unless you have some sort of abnormal situation you need to deal with, these switches are 99.9% of the time are going to be left in NORM; but at least this should provide some background understanding of their function. -
I just cant get the hang of this module (pilot)
Flamin_Squirrel replied to Chad Vader's topic in DCS: AH-64D
How so, VRS? If so, make shall approaches, and approach INTO THE WIND! It makes things so much easier. I think many sim pilots forget about/don't realise the importance of this, but it really does help. -
Sloppy technique! Try taking-off into wind, and accelerate in ground effect until you've gained some airspeed, and you should be fine with high temps!