

Pickles
-
Posts
5 -
Joined
-
Last visited
-
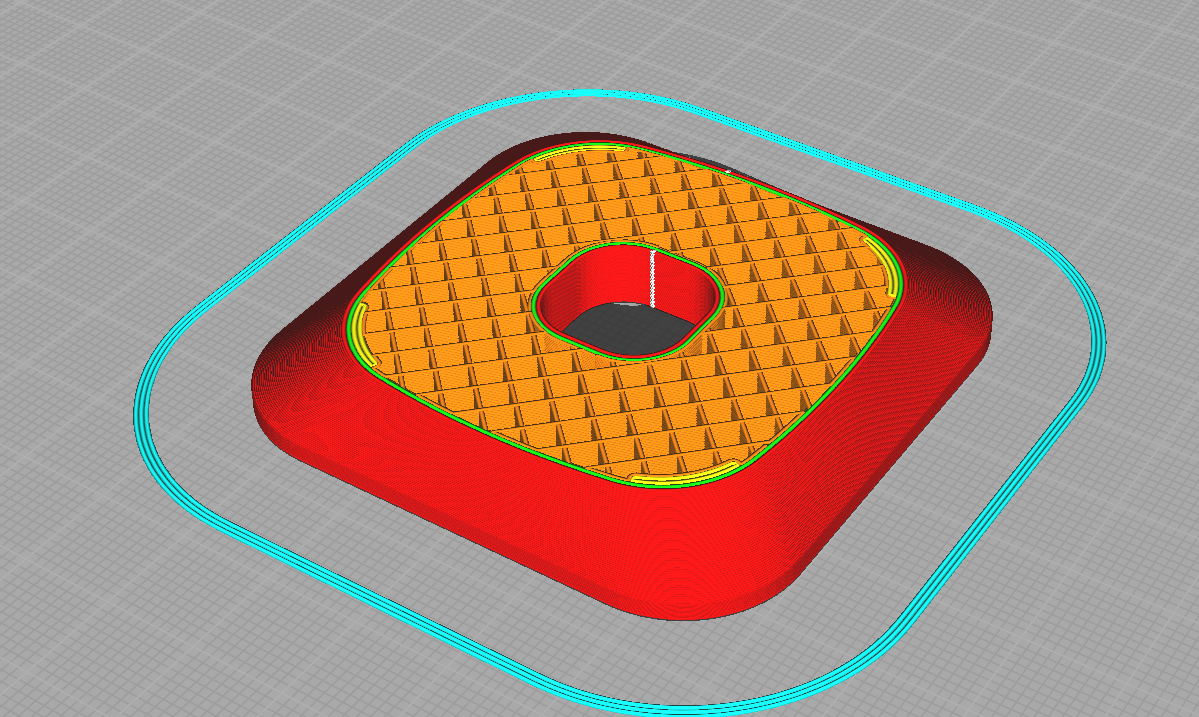
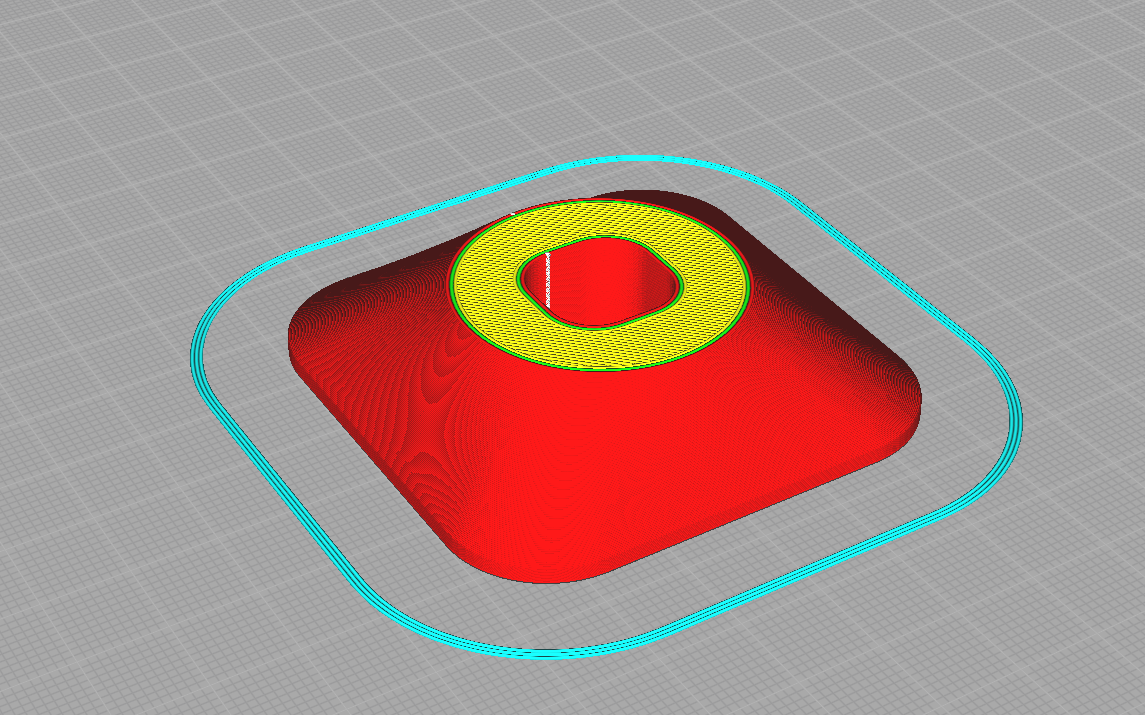
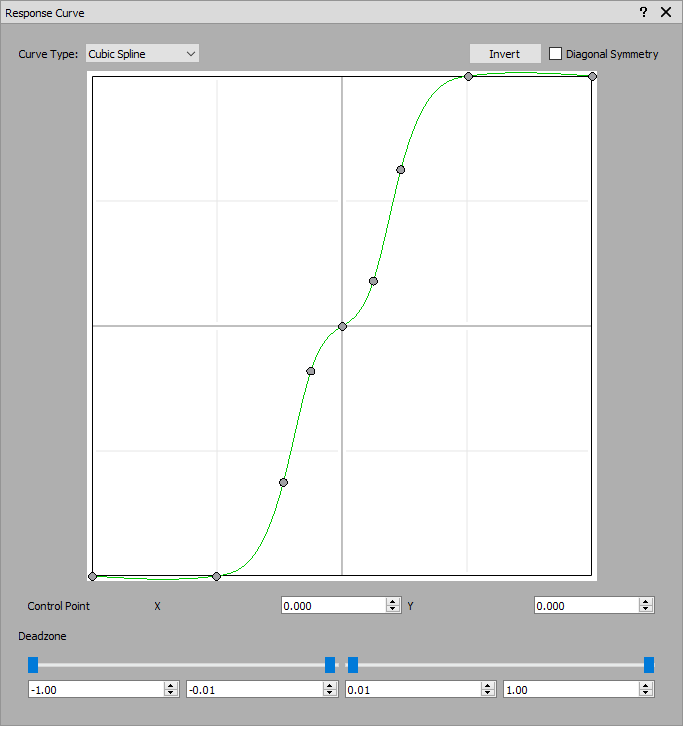
Just sharing a small project to imitate a "force sensing" joystick for the F16 without going all the way with a Realsimulator FSSB. Was finding that with a standard VKB Gladiator and "normal" joystick curves (either linier or exponential) it was difficult to find a setting that worked for the Viper. F18 and A10 felt fine, but the software imitation of the F16's force sensing stick just didn't work for me. Nothing impossible mind you, it just felt "off" and there was no way I could ever get close to an AAR connection. So after a bit of measuring and CAD work to make the stl, a 3D collar was printed in TPU to fit between the bottom of the grip and the top of the base. The idea being that by printing in TPU (a flexible filament) with a low infill percentage it would both limit X and Y throws as well as act as a force to move against. The print was done with 15% infill, which has worked out to be just about right for me. It provides sufficient resistance while being able to deform to accommodate joystick movement. Total throw is now about 10cm X and Y, with resistance increasing linearly from center. Between the collar and the base is some thin foam material to help reduce the "stiction" of the TPU on the base body. Flying the F16 is now very nice. The limited movement and increasing resistance as the joystick moves from center makes it much nicer to fly - at least for me. To the extent that within 10 minutes of using it I could get an AAR connect for the first time. Now I just need to stay there long enough to fill up! The X and Y curves are done in Joystick Gremlin and there's still some tweaking to do, but quite happy with the result. And while it's much better than before, I don't expect it's anywhere near as good as a FSSB. I've started dropping hints to the wife that maybe I should get a Realsimulator FSSB for my 60th next year VKB Collar.stl

- 1 reply
-
- 4
-

-
Just a quick post to let people know that Hollywood at least appears to be alive. I know many of us were worried for his health and hoping things were ok. At least I'm assuming it's the same Hollywood that has now archived Vaicom on GitHub. If you haven't yet, join the Discord with Pene's link above - I for one am hoping people with better C# and lua skills than I can take Hollywood's great project and develop it further under GPL.
-
 +1 With the likely demise of VaicomPro and the surprising number of users searching for a fix to get it working again in 2.8, it's obvious that there is a real need for this functionality in DCS. Disappointing that there been no ED response to @rurounijones request or engagement with the idea, so the more advocacy that community members make to encourage ED to opening-up the APIs the better. Personally, VaicomPro was a real game-changer for DCS. We need this functionality more than cloud eye-candy.
+1 With the likely demise of VaicomPro and the surprising number of users searching for a fix to get it working again in 2.8, it's obvious that there is a real need for this functionality in DCS. Disappointing that there been no ED response to @rurounijones request or engagement with the idea, so the more advocacy that community members make to encourage ED to opening-up the APIs the better. Personally, VaicomPro was a real game-changer for DCS. We need this functionality more than cloud eye-candy.- 92 replies
-
- 4
-
-
- overlordbot
- request
- (and 1 more)
-
Pickles changed their profile photo
-
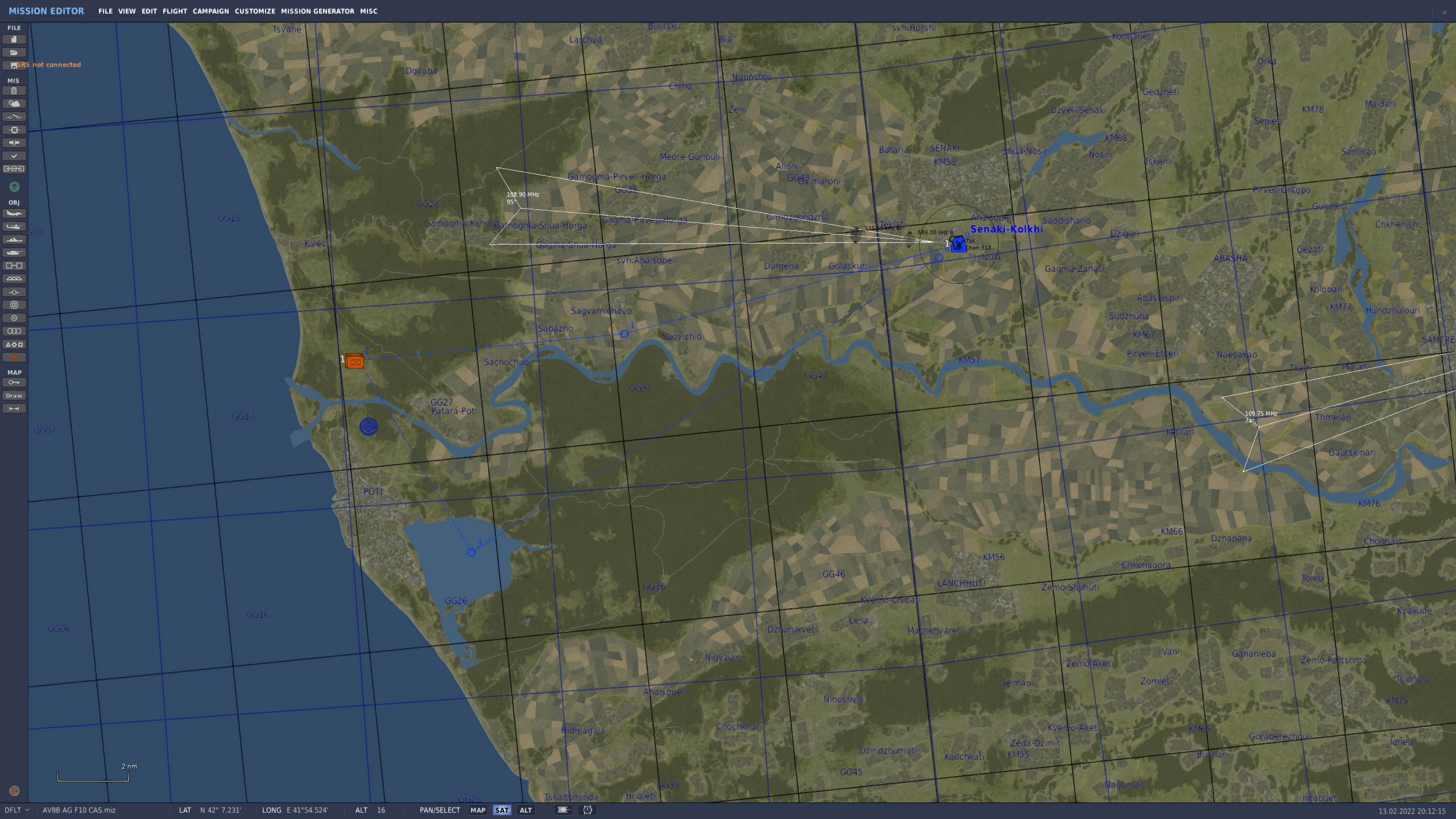
Can someone review the attached track file and let me know if the Data screen behavior is normal? It seems to show a constantly moving position with the a/c stationary. Does the same thing in the air with active pause on. Mission file also attached. Thanks AV8B AG F10 CAS.miz AV8 Issue.trk
-
Found my original SSI SU27 manual with Crimea map and Thrustmaster HOTAS pamphlet. Amazing detail in in the manual - the original ED crew really produced a quality sim for the time.
- 7 replies
-
- 10
-


.jpg.c8226f5a4936a3de8f1cd9ae7601bf0c.jpg)
.jpg.5abb5352a482ddb0f965371bd3213c73.jpg)