Patriot
-
Posts
143 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Patriot
-
Через Export.lua (подключается в пользовательских скриптах) Об этом очень много инфы на форуме и готовых скриптов. Даже сами разработчики выкладывали примеры. Но не на всех серверах разрешен экспорт.
-
Использовать для каждой панели свой комп-порт? Их там более 30! А питать чем всю инфраструктуру? Я уж молчу про кол-во проводов.. Не, это извращение. Правильно использовать именно rs485 или похожую схему. Так сделано на настоящих самолетах. Один модуль rs485 стоит 70 рублей. Это готовый. А если брать росыпью, то все 20 рублей. Экономии не получится, только проблемы. Хотел поругаться, что там ссылки есть, но нету:) Видать, в другой теме выкладывал. Для CDU, как я выше говорил, это Arduino Due. Дисплей к ней этот: https://ru.aliexpress.com/item/3-5-inch-TFT-Touch-LCD-Screen-Display-Module-For-Arduino-UNO-R3-HIGH-QUALITY-Free/1854595985.html Про MFD тут речи не было. Это совершенно другое устройство и ардуино там нужно только для кнопок. Вывод же осуществляется через VGA или hdmi разъем видеокарты. Дисплеи п размерам к оригиналу подходят эти: https://ru.aliexpress.com/item/1pc-Universal-HDMI-VGA-2AV-50PIN-TTL-LVDS-Controller-Board-Moudle-8-inch-1024-768-HE080IA/32377395835.html Он шире, но по высоте один в один. Ширина закрывается благодаря плате кнопок. Оригиналньый дисплей за не дорого не найдете, я искал очень долго. Корпус уже спроектировал, но еще не выпиливал. После CDU займусь..
-
На средних настройках летал на GTX 770 4GB. FullHD основной монитор + дополнительный FullHD для MFD. Игра на отдельном SSD, на котором больше ничего нет. Проц i7 3770k. Фризы только при загрузке игры, когда текстуры еще догружаются и при взрывае кассетных бомб. А 1060, которую ты рассматриваешь на 35% мощнее 770-й, так что ее вполне хватит. Сейчас взял карту 1080, выкрутил настройки в максимум. Фпс на земле 35-50. В воздухе в два раза больше. Ночью при посадке на аэродром в городе фпс падает до 18. Так что даже топовая карта не справится с максималками в некоторых условиях. В общем, я бы на твоем месте взял 1060.
-
А можешь написать обзорчик, как она с HTC Vive? Попробовал его на какой-то выставке, прикольно, но все как-то пиксельно. Там же пробовал окулус - были какие-то гонки. В купе с подвижной платформой очень погружает, но те же самые пиксели ((( Хочется HTC попробовать с DCS, но для попробовать как это дорого его покупать. Видно ли в нем ИЛС? Позиционирование работает только через коробочки, что на стенах? Без них нельзя никак? Ходьба по комнате не интересует..
-
У меня в подписи можете глянуть реализацию Caution Light (да и выше кинули ссылку на avsim). Сейчас делаю CDU. Вывод информации на CDU дисплей так же есть в теме, что в подписи. Все делается на ардуино. Для вывод используется Arduino Due - она пошустрее. Все панели связаны через RS485 в сеть между собой и работают на DCS-BIOS. Если что-то конкретно интересует, то могу рассказать подробней. RasberyPi для всего этого - это сильно жирно, имхо.
-
Рассредоточенная группа танков по городу или другой большой территории - частая ситуация. Тратить кассету на один танк - жалко.
-
А что за кокпит, есть фото глянуть? Я вот тоже уже давненько собираю на a-10c.. В подписи монжо посмотреть :)
-
Было бы интересно собрать всем, кто на a-10c хорошо летает, зайти на сервак и нагибать всех:) Только пара ястребов конечно нужна.. Но это было бы интересно, ибо одному все же скучно уже.
-
Очень быстро ей орудуешь) Она на джое забиндена?) Я что-то про нее и забыл...
-
Возможно, друг друга не понимаем. На видео с 2:20 до 2:37 производится атака. Между маркпоинтами с помощью DMS можно переключиться только если активен ILS/HUD, в режиме MAV DMS выполняет другую функцию - управление прицельной рамкой. Так как активность MAV не пропадает (о чем свидетельствует зеленая рамка), то это значит что переключение между маркпоинтами на видео происходит другим спосбом, не через DMS. Вот и любопытно как..
-
У тебя на видео рамка SOI маверика не исчезает: ты между целями вручную MAV передвигаешь (на РУДе соском, не помню как называется) или каким-то хитрым способом меняешь текующий маркпоин без переключения на ILS/HUD?
-
Всем привет! Хочу уточнить каким образом правильно атаковать мавериком, ибо вдруг что не правильно делаю. Напрягает задержка между целями в 4 секунды. :) Сейчас это происходит так: 1) С растояния 40-15 миль находим цели, на каждую создаем метку. 2) На подлете переглючаемся с режима RT PLAN на MARK. 3) Делаем ILS(HUD) как SOI 4) Выбираем первую нужную цель с помощью DMS вверх 5) Через чинахат_долгое_вперед направляем все SPI на цель 6) Делаем Маверик как SOI 7) Короткое чинахат вперед меняем угол камеры (приближаем) 8) Захватываем цель, если это возможно с помощью TMS вверх. 9) Пуск ракеты 10) Повторяем все эти процедуры с пункта 3 Ракет 6, значит, мы можем поразить до 6 целей, если делать эти действия очень быстро. Маверик начинает захватывать начиная с 8 миль (иногда бывает и до 10), если на эти действия тратить 3-4 секунды, то за ~3 мили до подлета к последней цели мы успеем выпустить все ракеты и уйти. Но вот вопрос: может, если более бытрый алгоритм перелючения между доп.маршрутными точками или можно автоматически заставить маверик захватывать цель (хотя в любом случае надо будет его еще и приблизить).
-
Can you show on the picture of what you're saying? Fuel Panel ready (temporarily without lever) :
-
Guys, how I can get speed and altitude a-10c ? For print on display 16x04?
-
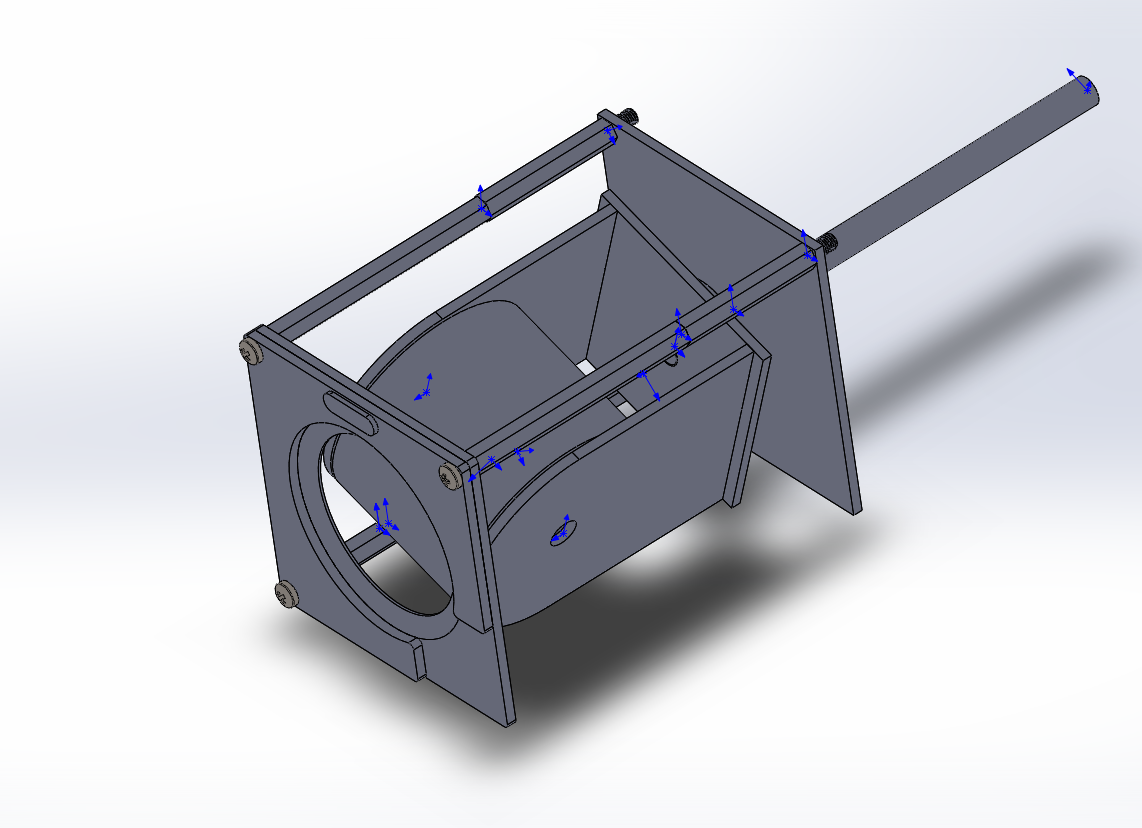
Thank you! I try make with encoder too. Began to design the mechanism in SolidWorks. :) Do you have skin for cylinder attitude indicator?

-
Engraving bit 10 degrees 0.3 mm. Does anyone know the dimensions of the attitude indicator?
-
Tnx!:) In Moscow snow apocalypse now )) You are from?
-
Caution light is ready! :)
-
pitbldr, thank you very much! And are you sure that width is bigger than height? In the photo it seems that the height is larger. Or it seems to me? ))
-
Ian, I need your help! :) I download latest version DCS-BIOS from github (0.2.5 and 0.5). In arduino 2560 I upload sketch from example: In slave arduino nano: Demo scheme: Problem: If use two jumper: with master and with slave RS485, then DATA don't send from master to slave and back. Master is freeze after some second (2-3). I see in debug log on PC: If I remove any jumper, then master normal send data to slave, and lamp Master Caution is work. But not work control from slave to master. In log: What I did wrong? And why don't work with two jumpers?
-
Ok, I wait :)
-
I need dimensions of your panel - it looks great! Thank you! PS: What is the difference between the words "dimension" and "size"? :)
-
Many thanks! Do you have any plans to add queues to not use a while loop?
-
Hi! I use old version dcs-bios, and use this code for button on analog pins (one pin for many button with resistors): #include <DcsBios.h> #include <Servo.h> DcsBios::ProtocolParser parser; void setup() { Serial.begin(500000); pinMode(A0, INPUT); digitalWrite(A0, HIGH); // pullup } int value = 0; int newbtn = 0; int btn = 0; void loop() { value = analogRead(A0); if(value < 59 ) newbtn = 1; else if (value < 65) newbtn = 2; else if (value < 72) newbtn = 3; else if (value < 80) newbtn = 4; else newbtn = 0; if(newbtn != btn) { switch(newbtn) { case 1: sendDcsBiosMessage("CMSP_ARW1", "1"); break; case 2: sendDcsBiosMessage("CMSP_ARW2", "1"); break; case 3: sendDcsBiosMessage("CMSP_ARW3", "1"); break; case 4: sendDcsBiosMessage("CMSP_ARW4", "1"); break; case 0: default: switch(btn) { case 1: sendDcsBiosMessage("CMSP_ARW1", "0"); break; case 2: sendDcsBiosMessage("CMSP_ARW2", "0"); break; case 3: sendDcsBiosMessage("CMSP_ARW3", "0"); break; case 4: sendDcsBiosMessage("CMSP_ARW4", "0"); break; } } btn1 = newbtn; } while (Serial.available()) { parser.processChar(Serial.read()); } // poll inputs DcsBios::PollingInput::pollInputs(); } void sendDcsBiosMessage(const char* msg, const char* arg) { Serial.write(msg); Serial.write(' '); Serial.write(arg); Serial.write('\n'); } void onDcsBiosWrite(unsigned int address, unsigned int value) { } How in new version write this code? #define DCSBIOS_IRQ_SERIAL #include "DcsBios.h" void setup() { DcsBios::setup(); } void loop() { DcsBios::loop(); }
-
Already :) And without backlight