yogi149
-
Posts
376 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by yogi149
-
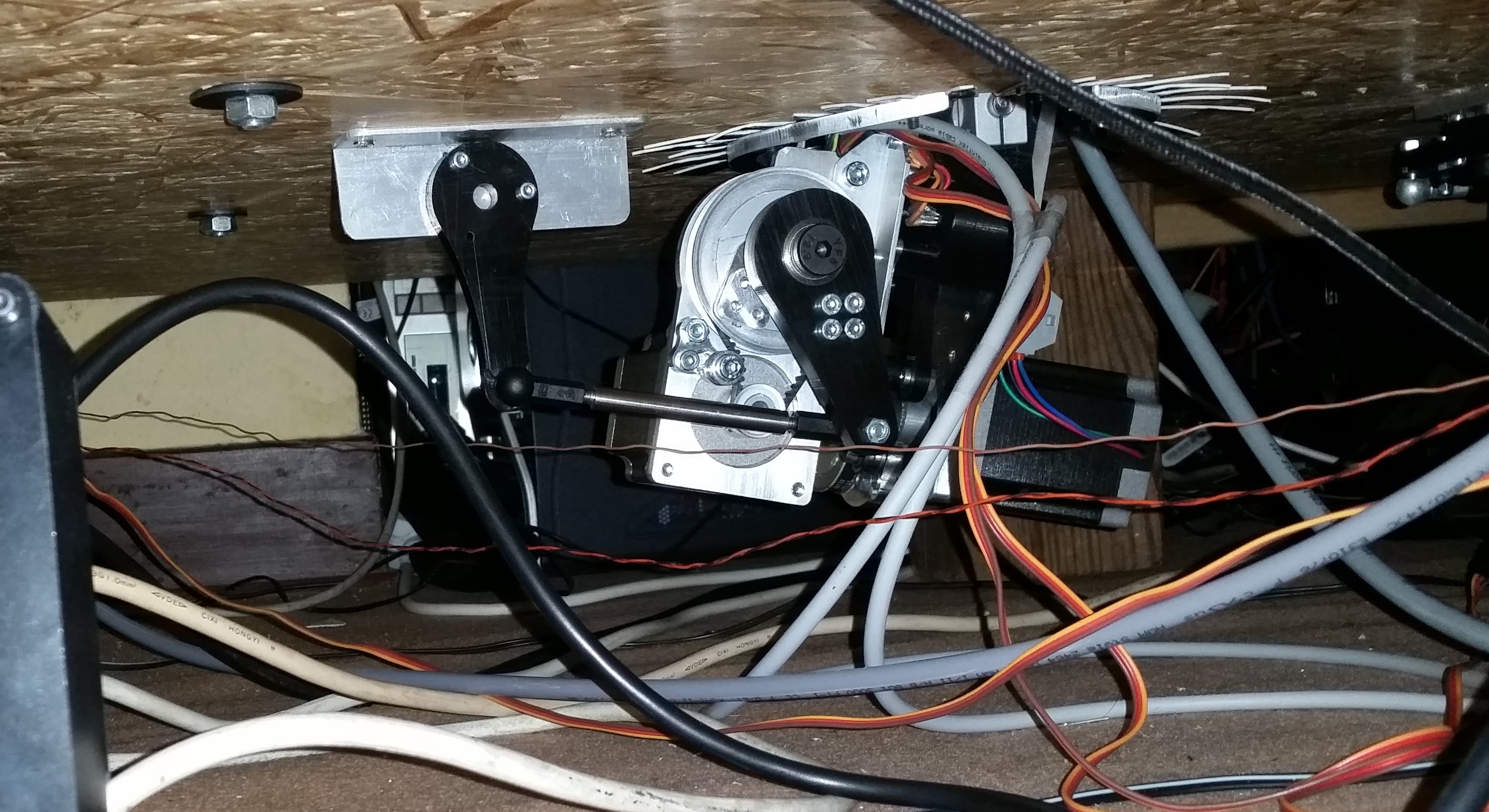
 Hi, yes, the big jerk (the rattling, icebear said) in FTR mode are not tolerable.:cry: The are intended by the different way I coupled the axis. Roll moves very smooth, but for the pitch axis I have to try some other lever ratios for the connection to the floor. Independently of that, I tried to explain icebear yesterday, that there can not be a "right center" when simulating the hydraulic steering :music_whistling:. Should we implement a function to the stick that "simulates" a center function? In my opinion no real helicopter has a stickposition for hovering without manual override. The hover position must be depending on distribution of the loading, weather condition and fuel. And independently the missing center. icebear flew really smooth with the unknown configuration.:thumbup:
Hi, yes, the big jerk (the rattling, icebear said) in FTR mode are not tolerable.:cry: The are intended by the different way I coupled the axis. Roll moves very smooth, but for the pitch axis I have to try some other lever ratios for the connection to the floor. Independently of that, I tried to explain icebear yesterday, that there can not be a "right center" when simulating the hydraulic steering :music_whistling:. Should we implement a function to the stick that "simulates" a center function? In my opinion no real helicopter has a stickposition for hovering without manual override. The hover position must be depending on distribution of the loading, weather condition and fuel. And independently the missing center. icebear flew really smooth with the unknown configuration.:thumbup: -
in my opinion: yes.
-
Hi, it is astonishing what this simple question triggers.:cry: I think, building a simpit requires a lot of planning and making. We only can offer "mechanical" plug and play, if ordered.
-
Hi, if using the non-matrix version from the BU0836 board they work similar. But the matrix version with 36 button didnt work for me with not momentary switches. But if I think over this, it seems to me, that I did not use 36 diodes.:music_whistling: For the BBI they are not necessary, so connection was easier for quick using. The problem at all is, that both simulators I use, not really make use of non-momentary switches like used in real aircraft. Physical position is not used or can only be realized with some work. :cry: I think, that in progress with using an arduino Mega for our FTR solution, we will realize a switch modul and perhaps using the Mega for our sensor input too.
-
Hi Sokol1_br, but the matrix from the BU0836A can not manage real switches, only momentary buttons.:( This was the reason I changed to the BBI board in my cockpit. And perhaps in near future to an Arduino Mega for input/output. And the question was: do I need a single joystick controller for every part. My answer would be no, but I can make additional housing for controller and BBI, so customer can order a "plug & play" solution, but with additional costs.:cry: For my FTR version, I integrated joystick controller and BBI into the necessary power-box. And yes, the parts are 3D-SLA printed from PA-(polyamide)powder and finished with acrylic black mate color.

-
now the longer answer: 6 axis joystick controller (Bodnar BU0836 has 8 axis) 1x roll 1x pitch 1x yaw 1x collective 2x throttle 17 input channel for the EC-type cyclic grip 20 input channel for the EC-135 colletive switchbox makes 37 input lines BBI offers 32 and the joystick controller additional 12 So you need al least 1 Bodnar joystick controller BU0836A and 1 BBI These pictures show the delivery condition for our grips and switchboxes. Pictures from the B8 grip and the UH collective will follow next days.:huh: They need less button input lines.
-
Hi, short answer: 1 of each type But I prepare a longer answer with some pictures.;)
-
I think the pedals are no problem.;) For the stick tubes, I will ask my manufacturer, but instead of welding the bow part to the straight part, I will design a 3D printed part. For the Co-pilot cyclic it would be helpfully to find some more pictures from the original. Then will can offer this grip like our B8 or EC-style grips.
-
THX Trip, ok, in that way it will not be plug and play.:( The point is the intended way to mount it. My intention was to make a replica of the cockpit for helicopter. Like many other simpit builder made it for 737 or C-172. The people who made these are normally not "plug and play" guys. They want the look and feel of the cockpit, but they settled to one type of airplane. Nowadays with VR you can enter every aircraft you want, so you really need universal controls for all type of aircraft in a single set. And that is difficult in my opinion, airplane and helicopter are steered in different ways.:pilotfly: So you need different controls if you want to get the right feeling for your aircraft. I can design mount boxes for my controls for mounting above bottom (but they will look ugly :cry: in my opinion) I can offer additional plugs for the buttons and switches, but good plugs are not cheap. You can use a complete controller board for one stick, but you have to buy it. (not necessary because one controller can handle 8 axis) In my cockpit works the prototype for the FTR-Cyclic and because the drives need some more equiment. I designed the powerbox which include the controller for up to 8 axis and at least one buttonboard for 32 buttons. This box will be connected with only 1 USB to my PC. We will offer this box as building kit or with additional cost as plug and play.
-
Hi much simpler: it is one of two additional seats from my minivan. All seats except the 2 frontseat can be taken out of the car simply. To buy a "smart" seat from ebay was a recommendation from the buddy who gets the first UH collective. With the shown base parts I could mount it on my pit floor even with the moving rails. And the seat height match nearly the original height. Only the with is slightly too wide, so I moved my collective 50mm to the left for better moving and gripping. If someone wants the drawings for these EC-120 / AS-350 style seat-base parts, please simply mail me, I can send them in DXF or other file format. And I think that I can design some SA-342M Style mounts for the "Smart" The seats for older models are really cheap at ebay, mine was only 39,-€ + shipping.
-
Hi souporsonic, it is from an 2 seater "Smart", buyed on ebay. the picture shows the swiss original for my simpit.
-
my switchpanel, which is still waiting for the substructure. On it's backside works an arduino mega for communication via ethernet with my XPlane. I think communication with DCS will be realized middle of the year.
-
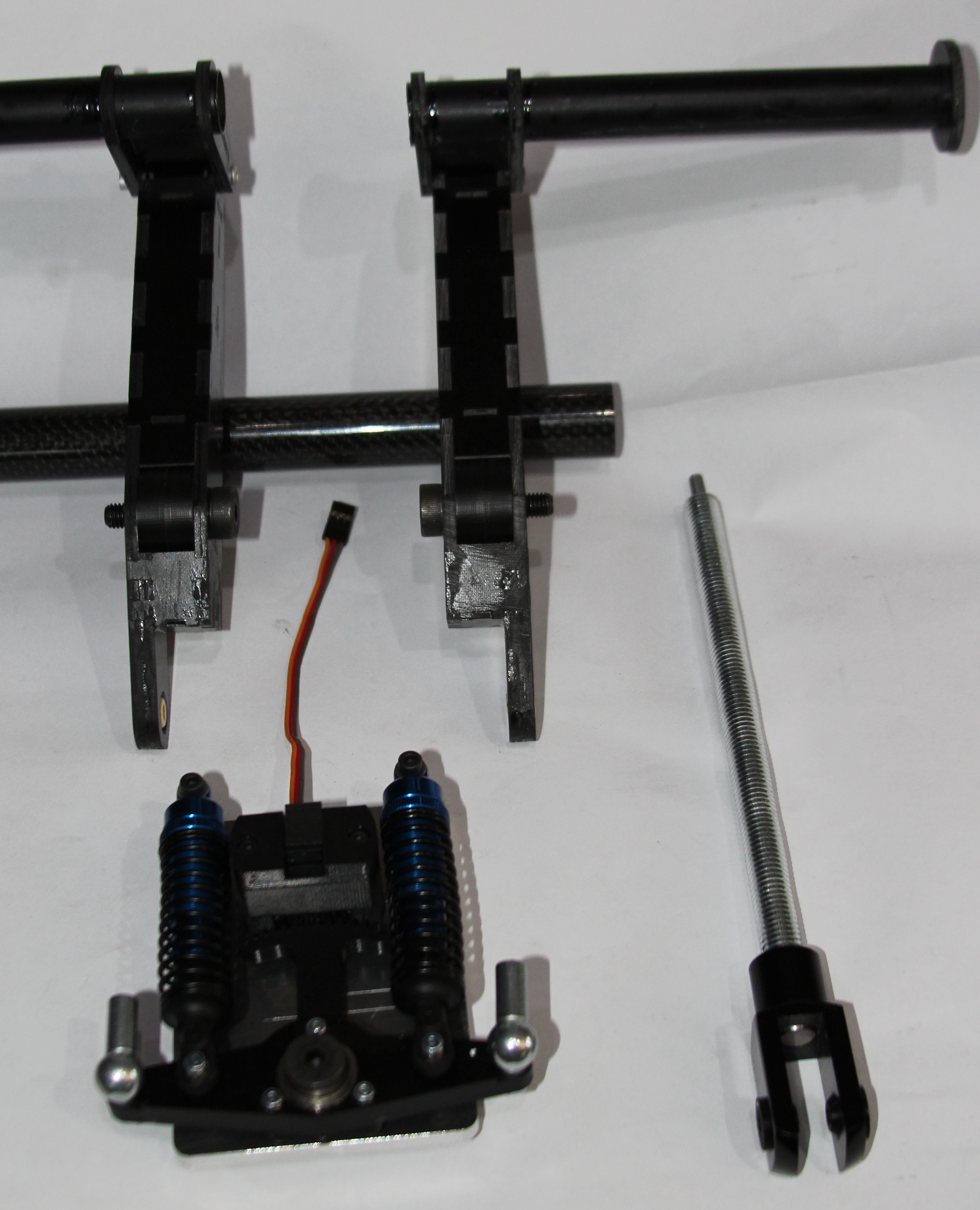
my pedals with our damped base.
-
a smart seat was mounted on the floor and my additional car seat went back to my car.:music_whistling:
-
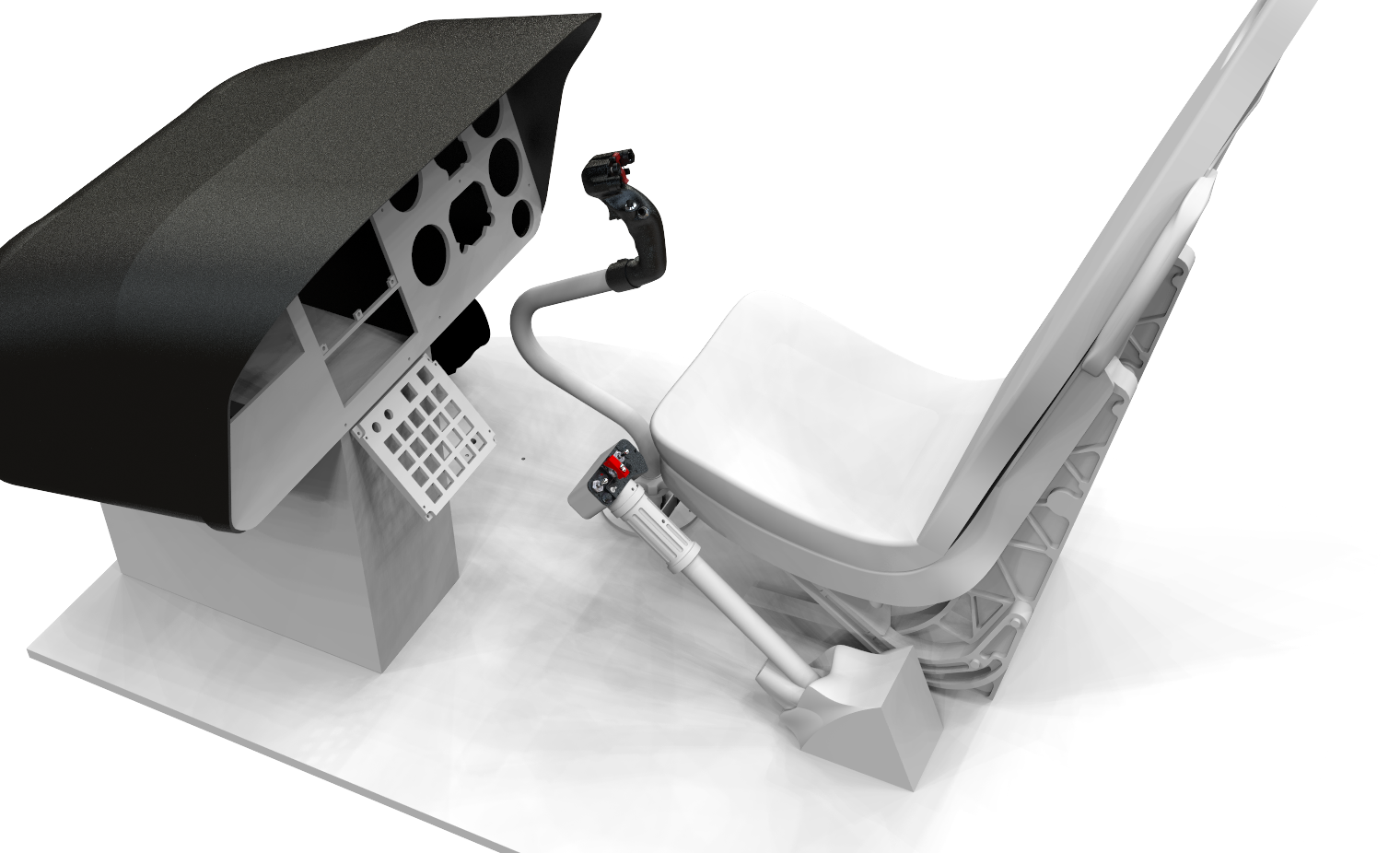
this is one of my first picture in Rhino3D
-
Hi, since we also make scale parts for RC helicopters and get the opportunity to measure out a EC-120 based in switzerland, the whole cockpit was re-engineered in Rhino3D and the first parts were made in dez. 2014 The EC-120 is "simple" enough to make the whole Panel with all gauges physically working. It has only 4 little displays for GPS and VEMD.
-
Hi @all, can you tell me exactly what you mean with "plug & Play"?:( For our base-unit you need a hole in the floor and some screws for mounting it. Sensor are ready to plug in a Leo Bodnar board. Button and switches are wired in the collective box and grip. All uses 1 common line, so the other cable end must be plugged or soldered to the button board.
-
Hi Trip, for the "normal" damped version you need 110mm under the floor. My prototype for the FTR need some more place.:(
-
Hi, nearly 3 years ago, a buddy from RC-forum asked me to make the switch-box for the UH collective, which he wants to combine with his throttlestick. Some days later I could show him this box. Made from pictures and some measurements. In the following discussion for the adapter and the necessary steering angle I decided to make the base too. And because I did not want to sell parts, without tests on suitability I decided to make a simpit for my own. And because the EC-120 is my favorite helicopter with a cockpit that seems not to difficult I started this. I the following posts I will show pictures and renderings from the simpit I fly in XPlane and DCS.
-
Hi and THX Trip to split the thread.
-
Komodo Simulations Huey Cyclic and Collective Review
yogi149 replied to hansangb's topic in PC Hardware and Related Software
Hi, ok, we can offer the preparing of the cable ends for plugging or soldering too. Simple remark in the ordering process. -
Komodo Simulations Huey Cyclic and Collective Review
yogi149 replied to hansangb's topic in PC Hardware and Related Software
Hi I am yogi from microhelis, and perhaps I can answer some questions about our controls. I do not want to advertise our products here, but maybe I can answer technical questions and wishes. Our controls will be shipped "pre-mounted", all buttons and switches are inserted and plugged to the control cable. The cable end will be shipped isolated and has to be prepared for plugging by yourself. The hallsensor have a 3-pol cable which is used in RC for servos, and can be plugged directly to the Bodnar board. (and sorry if some of my descriptions are perhaps not easy to understand, english is not my native language :music_whistling:)