yogi149
-
Posts
376 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by yogi149
-
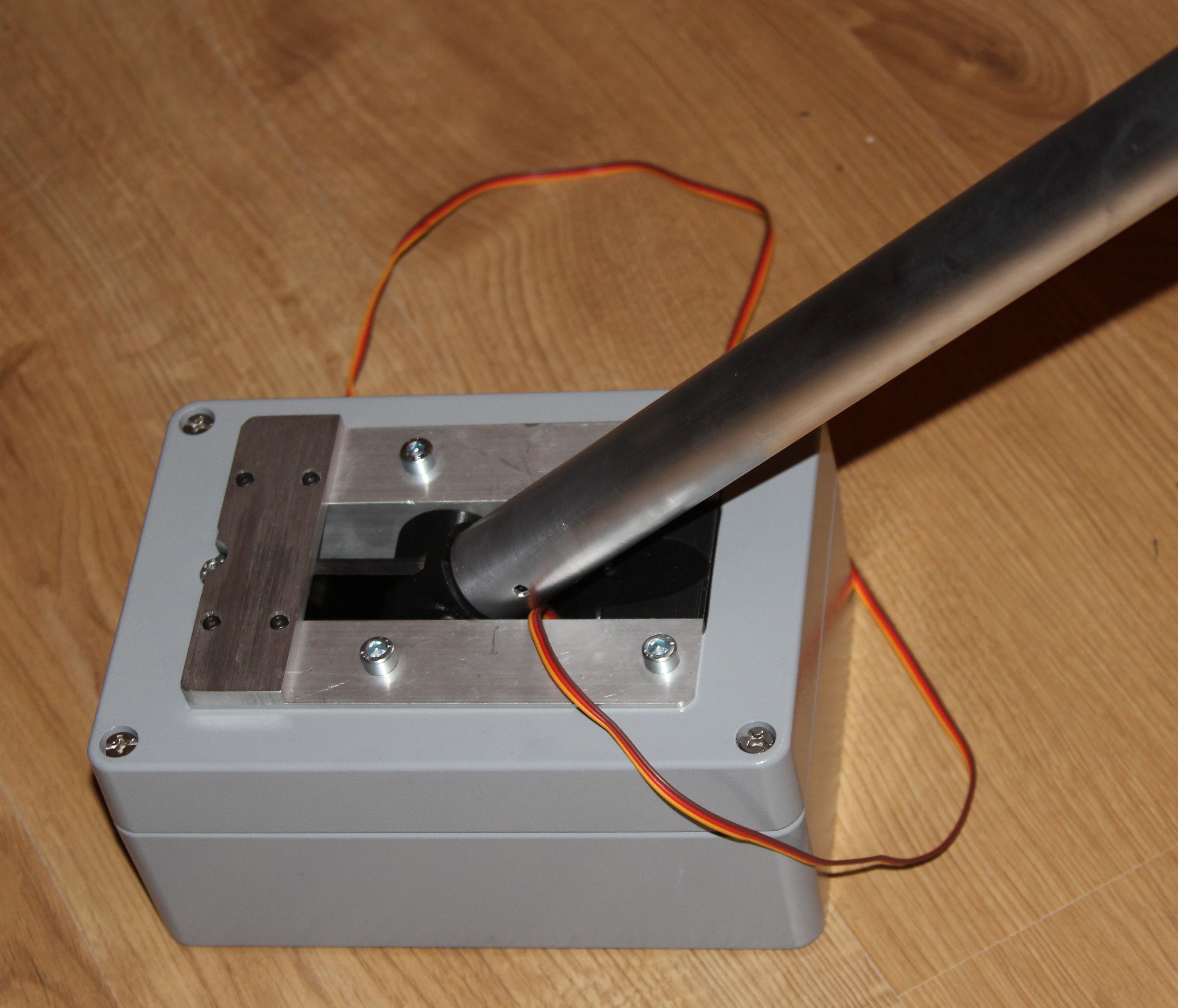
 Hi, for those who do not want to make a real heli floor:music_whistling:, I made some research for a stable aluminum box for mounting the collective on what ever they want. next days this part will be able to order in the shop. This stable powder-coated box, with 4mm walls, can be mount with 4 screws through its bottom, and should remain some crashes.
Hi, for those who do not want to make a real heli floor:music_whistling:, I made some research for a stable aluminum box for mounting the collective on what ever they want. next days this part will be able to order in the shop. This stable powder-coated box, with 4mm walls, can be mount with 4 screws through its bottom, and should remain some crashes.
-
Hi, but how high is hobby range? In the current state, the FTR cyclic mechanics (roll and pitch) would be complete with 2 axles drives, the EC-135 Cyclic handle and the Powerbox with integrated BU and BBI board from Bodnar in the range of approx. 1300,-€ to 1400,-€ :huh: BTW: I try to make some hints for my controls direct in the shop. For this I made a new product group "Tutorial" in the " the "home cockpit" group.
-
Hi, liegt vielleicht die magnetische Kupplung auf einem externen Schalter?
-
Hi, THX for the technical descriptions. they are very useful for me. At moment my simpit is not flyable.:cry: I upgrade my collective to the latest version of the EC-120 switchbox and add some new brake-parts :smartass: For the FTR base I catch some ideas to get all customers satisfied. At moment the testing runs with an BU0836 for the sensoraxis, an BBI32 for the buttons and Arduino Mega for the FTR. With this combination, it easy to test the stick movements. All buttons from my EC-120 cyclic grip, that have influence to trim system are joined to the Mega. So we can program most of the trim-system functions. I know we could use the arduino to for the sensoraxis, but for this point my programming skill is still to low. I hope a friend of me can help me in this point. If we take the Arduino as joystick-controller and trim-system handler, we can add a startup procedure for centering the stick to a teached position. Even this is a non-real function.:music_whistling: I do not know whether DCS can playback a flight, in XPlane will it be possible to show the stickmoves while playing back:smartass:
-
Hi, I made 1 set of pedals for the Huey as prototype. With some minor changes I would make it for customers. But they are really expensive:cry: And you need some place to mount them. In my opinion they only make sense, when you make a full-scale simpit. Using VR, cheaper pedals with the right "feeling" would be the better way. (They are under development :music_whistling:) And for a complete rig, there are some points where a customer may be injured. Most rig I see are made from a DIY design, which is really ok for personnel use. But if I would sell these parts, who cares for the product liability? Together with my dad I engineered some machines for production with many restrictions to prevent people from injuring, most rigs I see did not match the simplest rules for prevention. If I find a way to design a rig which follows my restrictions, I can sell it.:pilotfly:
-
Hi Trip, only these 2:huh:
-
Hi, we made some pic before shipping:music_whistling: The cable is still isolated and "closed", so you have to remove the cable sheath and stripping the wire ends.:(
-
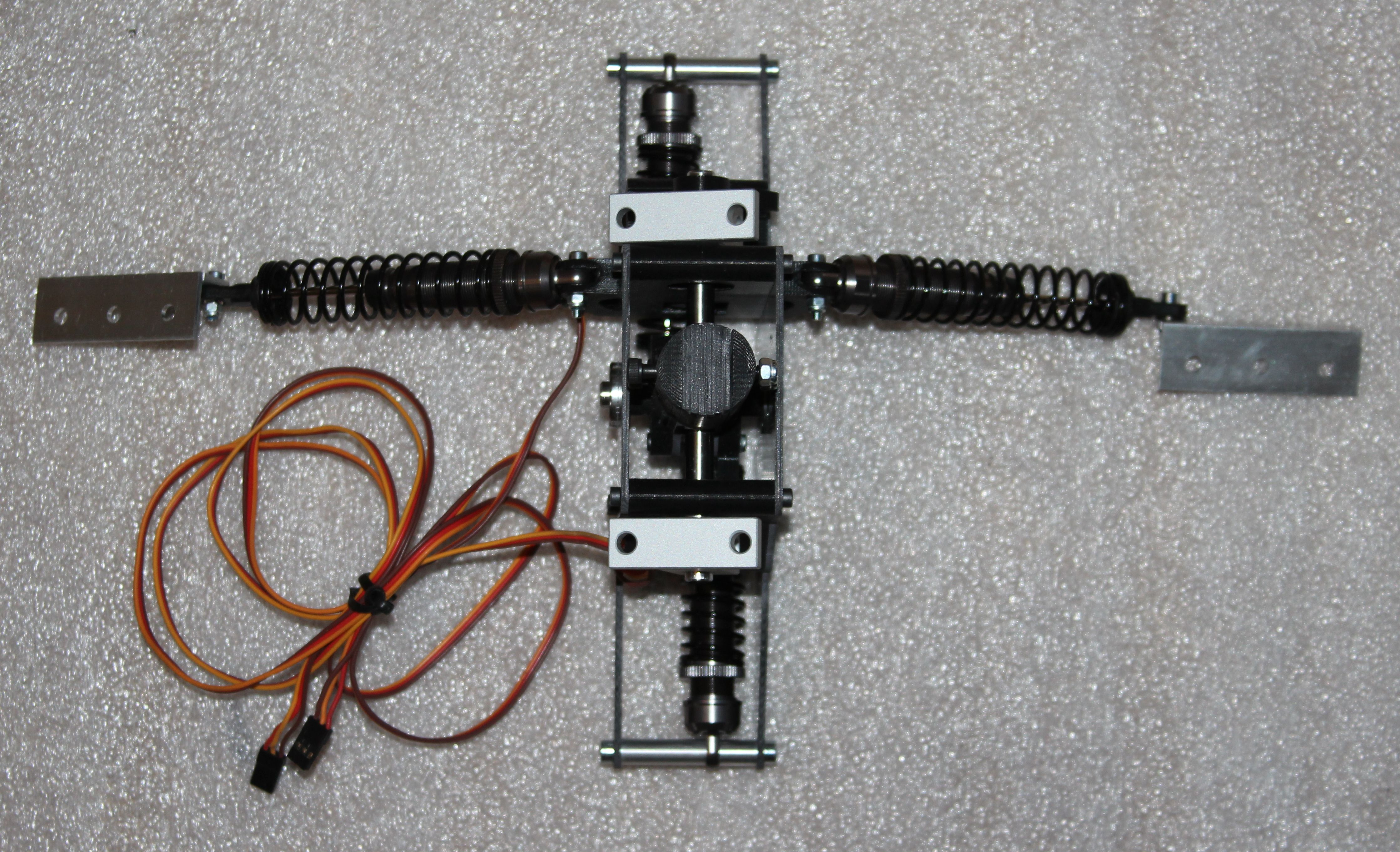
so sieht meine Basis von unten aus. Rechts sind die einstellbaren Bremsbacken. Die könnte ich auch so gestalten, das sie mit einem Hebel und Bowdenzug gegen eine Feder gelöst werden. Da kann dann auch noch ein Microschalter verbaut werden, der dem DCS auch die Betätigung mitteilt.
-
Hi, Dafür könnte ich sogar aus meiner Basis ein Variante mit passender Bremsfunktion machen. :smartass:
-
Hi Micha, die Collective Basis von uns hat doch nur eine einstellbare Bremse. Wie sieht den die Box dafür aus, die habe ich nicht auf dem Schirm? Andere Griffe müssten auf der Cyclic Basis, ob FTR oder normal, schon gehen. Muss dann halt ein passendes Rohr mit Adapter gemacht werden. Aktuell bleibt die komplette Trimm-Arie im Stick, der Sim bekommt da nichts von mit. Sollte deswegen eigentlich immer funktionieren.
-
Hi nicht immer, manches müsst ihr mir schon sagen.
-
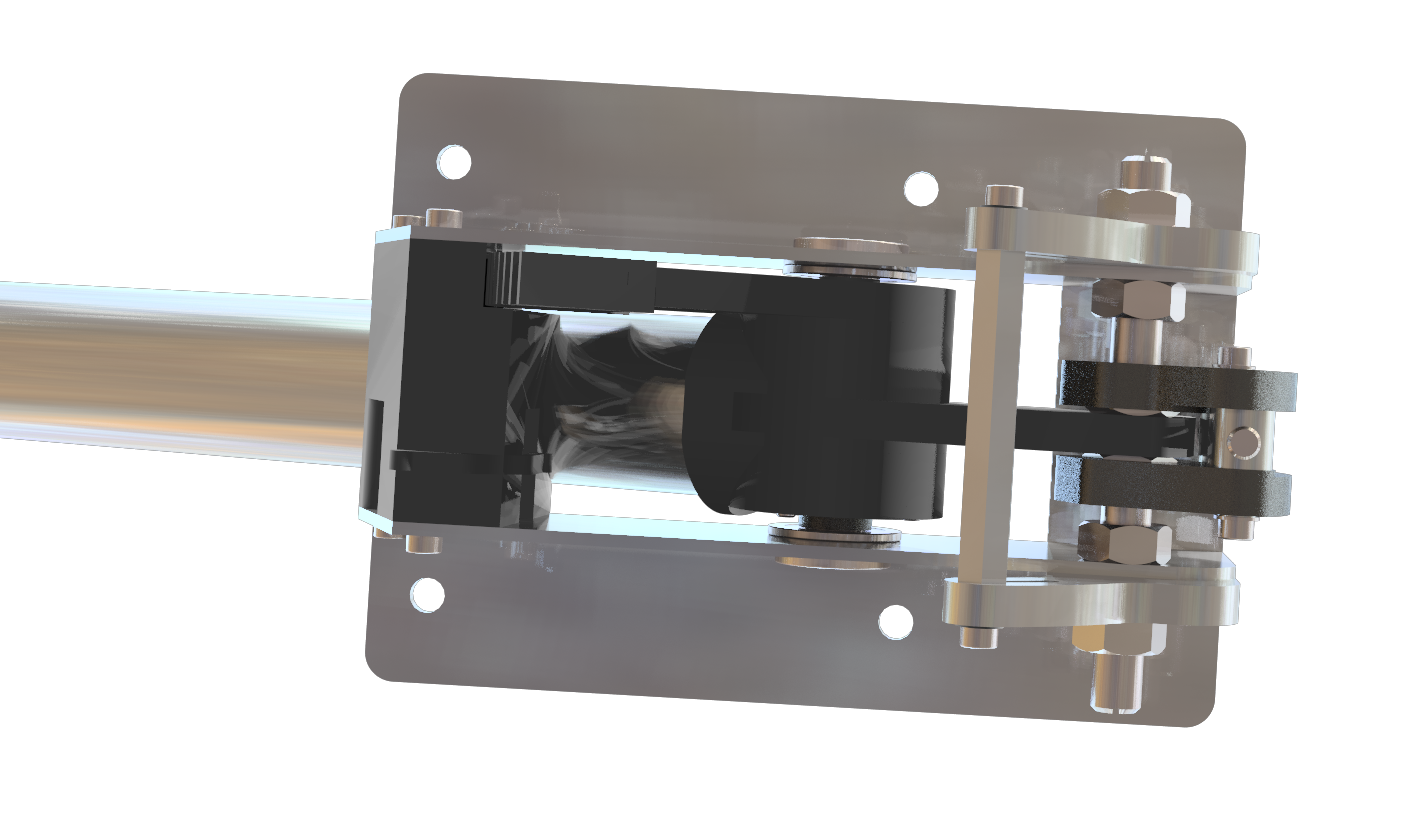
Hi, der innere Part ist identisch, sodass die jetzige Cyclic-Basis nachgerüstet werden kann. Die GFK Seitenteile und die Dämpfer fallen dann weg und werden durch Aluseitenteile und die Antriebe ersetzt. Die FTR Mechanik braucht allerdings etwas mehr Platz nach unten. Momentan bin ich auch dran noch "Bodenboxen" zu designen, damit eine Montage auf dem Boden durchgeführt werden kann. Wobei ich persönlich die Montage wie im Original unter dem Boden schöner finde.:pilotfly:
-
Bitte habt Verständnis, wenn ich hier zu Preisen nichts schreibe. Und die FTR Version muss ja auch erst einmal komplett mechanisch funktionieren. Funktionen können danach auch noch nachprogrammiert werden.
-
Hi, die aktuelle Basis kann beides. Mit montierten Federn hat sie einen weichen Mittenbereich, die Federkraft wird nach aussen höher. Ohne Federn ist nur die Öl-Dämpfung aktiv. Beim Collective ist nur eine einstellbare Bremse. Die "etwas" aufwändigere Cyclic Version mit FTR soll im Serienzustand noch ein paar Tricks vorweisen können.
-
Hi, und weiter.... Aktuell gibt es Standard Controls mit gedämpfter Bewegung und Nulllage über Federn. Was aber nicht der original Funktionalität entspricht.:cry: Weil auch in unserer Facebook Gruppe der Wunsch nach einer FFB Funktionalität aufkam, habe ich mich damit mal beschäftigt. Aber was passiert da: FFB gibt es in dem Sinne nicht in einem Helikopter mit hydraulisch unterstützter Steuerung.:( Was es aber bei Helis mit Autopilot und Trimhilfen gibt, ist die sogenannte FTR Funktion. FTR steht für Force-Trim-Release. Damit kann man quasi den Reiseflug (und noch ein paar Dinge) etwas einfacher machen. Dabei wird das Federsystem, was einem ein wenig Rückstellkraft auf den Stick bringt, bei betätigen der Taste ausgekuppelt und bei loslassen an der aktuellen Position wieder eingekuppelt. D.H. die Federmitte, also der Bereich ohne Rückstellkraft befindet sich dann an der aktuellen Stickposition. Dort kann dann gegen die Federn weiter gesteuert werden. Dort ist das Verhalten wieder, wie ein "normaler" Joystick mit Federn. Zum noch gemütlicheren Fliegen, kann jetzt noch mit dem Coolie auf dem Stick die Mitte direkt verschoben werden. Man kann dann sogar die Hand vom Stick nehmen (solange wohl keiner auf einen ballert:music_whistling:). Ein paar Tasten muss ich in meinem Testsystem noch anbinden, dann kann ich das System darüber auch komplett an- oder ausschalten. Aktuell entspricht das Fliegen mit gedrückter Taste einem Fliegen ohne Trimmsystem und ohne Zentrierkräfte. Schnelle Bewegungen dabei sind allerdings Systembedingt durch kleine Ruckler spürbar, die aber nicht beim fliegen stören. Icebear (hier im Forum) konnte die 1. Version schon etwas testen, allerdings war da die Nick-Achse noch fürchterlich.:cry: Er hatte auch noch einen Wunsch, der im englischen Teil schon zu heftiger Diskussion geführt hat.:huh: Wer bei uns in Aachen zum probieren vorbeikommen möchte, kann das gerne machen. Kaffee gibt es immer, und wenn wir z.B. für Samstags morgens ein paar Leute zusammen bekommen, gibt es auch wieder Brötchen.:smilewink:
-
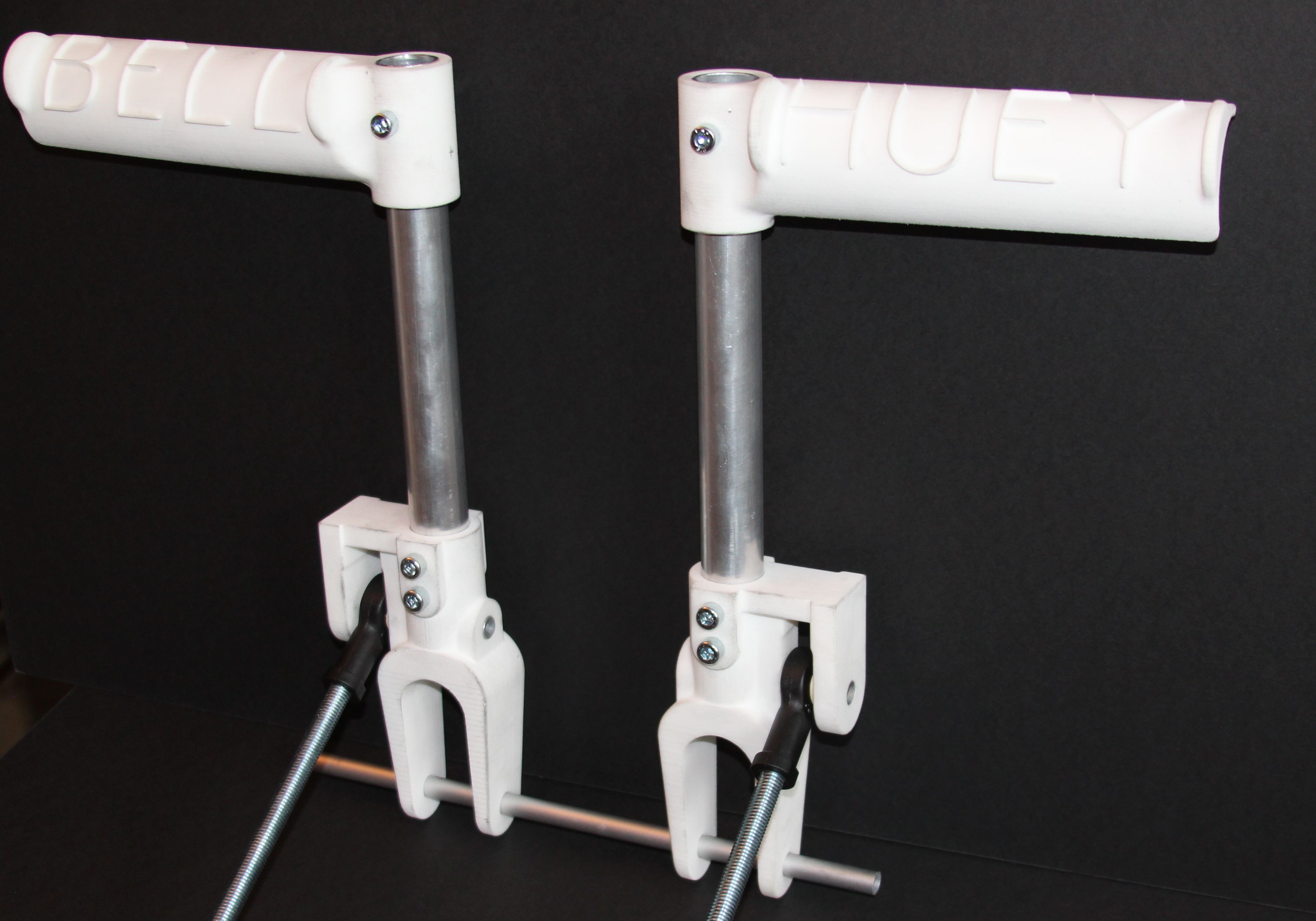
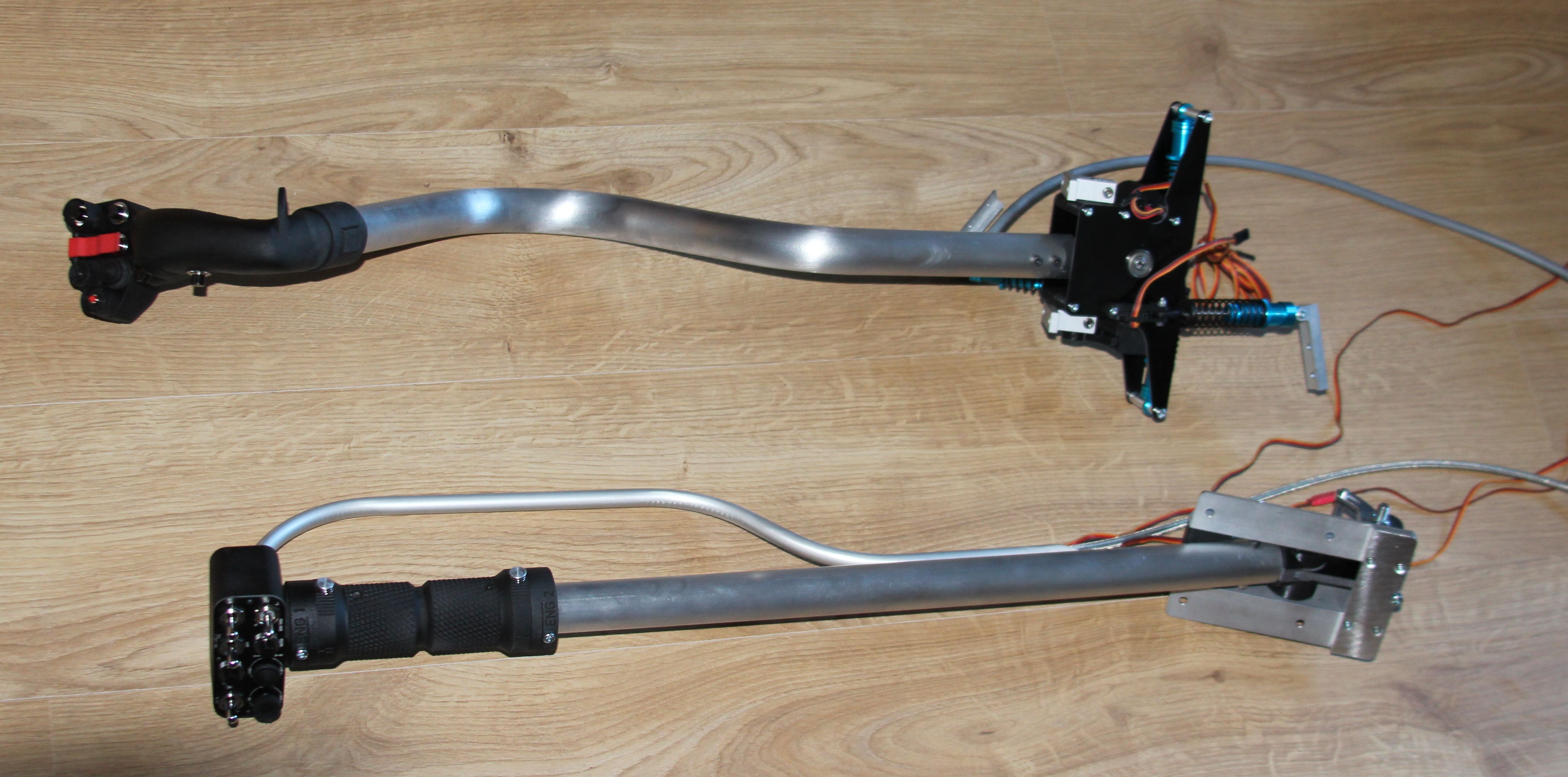
Hi, in der Hoffnung, das es hier nicht als reine Werbung gesehen wird:music_whistling:, kann ich gerne Fragen zu meinen Controls beantworten. Da ich eher zufällig zur Entwicklung von Heli-Controls gekommen bin und das ganze vor der VR Zeitrechnung angefangen hat, sind meine Sticks und Pedale eher als Repliken angelegt. Angefangen habe ich nach einer Anfrage von einem User in einem Modellhelikopter-Forum, ob ich denn neben meinen RC-Scale Teilen auch eventuell einen Huey-Collectiv-Head machen könnte. Klar, kann ich. Aber die Ansage, das das dann an einen ominösen Throttle-Besenstil kommt, hat mich dann dazu bewogen auch gleich eine Collective Mechanik zu machen. Durch meine berufliche Vorbelastung und meine Philosophie war ich dann quasi dazu gezwungen, mir das zum testen natürlich erst mal selber zu bauen. Dafür hatte ich mir meinen Lieblings Helikopter, eine EC-120 ausgesucht, die wir auch noch in dem Jahr für Scaleteile ausführlich fotografiert hatten. "Meine" EC-120 ist in der Schweiz stationiert und hat ein ziemlich einfaches Cockpit, von der ich die rechte Cockpitseite ziemlich komplett nachbilden werde. Inklusive mechanischer Instrumente. Die brauchte aber erst einmal Mechaniken für die Steuer Eingabe. Also neben dem Collektive auch Pedale und Cyclic. Mit Hilfe von einem anderen Sim Verrückten, mit dem wir sogar schon vorher angefangen hatten den Cyclic-Grif der EC-135 nachzubilden (das war aber mangels Möglichkeiten etwas versackt :cry:) konnte aber jetzt doch dieser EC Griff realisiert werden. Er baut sich ein Simpit mit Doppelsteuerung für die EC-135 auf.
-
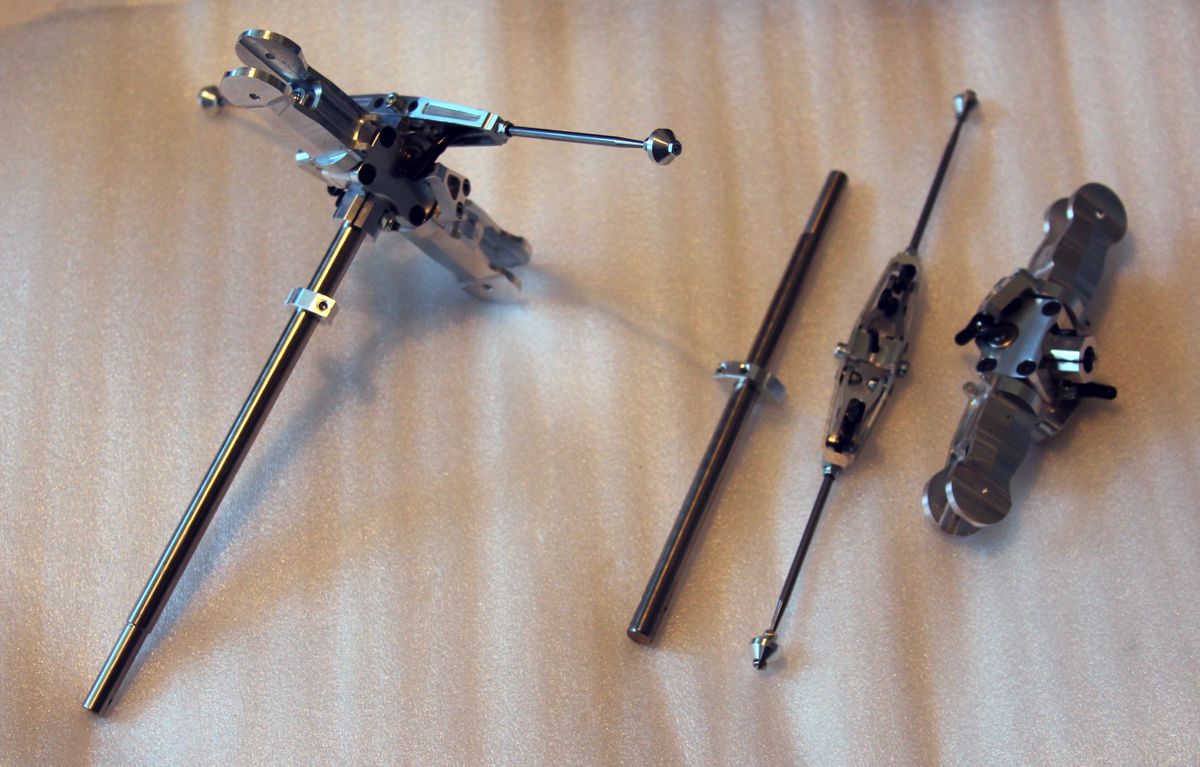
Hi technical they do the same job: keep the bladeholder and blade to the center hub against the centrifugal force.:pilotfly: The rotorhead for the EC-135 is working different, there is only a hole in the 70mm thick carbonfiber beam inside of the blade. This head do not use a TT strap against the centrifugal force. The control set you ordered has oil filled dampers with removable springs.:music_whistling: If removed there are only the dampers active.
-
Hi, but the manufacturer and the airworthiness directives call it "tension torsion straps" :music_whistling: http://www.airwolfaerospace.com/awa/products/products-bell-uh-1-204-205-210-212-214 and https://www.google.de/url?sa=t&rct=j&q=&esrc=s&source=web&cd=10&cad=rja&uact=8&ved=0ahUKEwiR-ZeuyYjSAhWBGywKHYTmDnMQFghfMAk&url=https%3A%2F%2Fwww.caa.govt.nz%2FAirworthiness_Directives%2FUH1.pdf&usg=AFQjCNEUeA5eX2Ugca8lIx1seJLRKshl2Q&sig2=bx_SzZ-Jd6aVFw4EUCUfDQ but I agree that the reposition force should not be high. My opinion agrees with yours, that the stick center must be made manually. But for those customers who want a centering function, independently it is real, we can add this in the program.
-
Hi heloguy but I think part 81 in this picture: must be a torsion tie bar. I found this drawing when designing our small RC-helicopter rotor-head: :music_whistling: I wrote that the rotor spins in this video, but I have seen many videos where the pilot move the stick for checking the movement.
-
Hi, I have seen several such startup videos, where the pilot moves the stick before powering up the hydraulic. And I know at least one video where the pilot make this move with spinning rotor. sec. 35> We will program the virtual centering at the push of a button. (after crash :music_whistling:)
-
Hi, take a look to the first seconds of this video please: :smilewink:
-
Hi, after talking to icebear via FB, I think he is mostly right, and I have to implement this behavior. Most rotorhead constructions use some kind of a "bendix" element to intercept axial forces. (the yellow part in this picture from an BO-105 head) This part takes all centrifugal forces, so these heads do not need thrust-bearing like the RC-helicopters. But this part makes even more: it also generates a restore force. And this force will align the mainblade when hydraulic is shut off. So the stick will get a nearly centered position. (I found it even in the UH-1 head, engineered before the BO-105 head.) Link to one patent I found: tie-bar @trip: helicopter pedals (as far as I know) have no centered position, and I should finally remove my spring from my damper. :huh: The damper will remain, because they simulate the behavior of the linkage rod. The collective normally has adjustable friction, so the pilot can adjust it until he feels well with it.
-
Hi I simply could program a codesnippet, that run to a previous learned position, if I press an assigned button. But at moment it would be much simpler. Thus the FTR system is independent from the simulator logic, I can activate it before using the VR googles. Thereby I can give the stick the position I want and set the center. To the defense of icebear: he used the system only some minutes without VR, in front of my 3m screen with beamer from behind.
-
Hi icebear, my technical explanation for this behavior: without activated hydraulic, the swash-plate is driven directly from the cyclic stick linkage. If you have a cold start with your helicopter, hydraulics power up after sitting down on the pilot seat. :music_whistling: Therefore the force for moving the stick is much higher without hydraulic. This keep the stick in its position, but the stick can be moved easily, without the reaction force from the swash-plate, while the rotor is not spinning. The stick forces with spinning rotor but without hydraulic are nearly 300N.:huh: But as I wrote before: with the programming possibilities of the Arduino, I can implement a startup procedure, which can move the stick to a learned center, were you can reach it with your hand. edit: too slow.
-
Hi, after some minor changes, I invented icebear to take an other ride next days. Now the pitch axis also moves really smooth, with less feather force in trim activated mode. In non-activated mode there remains little vibration due the magnetic pole of the used stepping motor. But you can move the stick nearly without force. In activated mode, the steering seems to be nearly like my damped version. In both systems you need little moves until the opposing spring force builds up. I think that my reading of the technical drawings, I got from EC-135 and UH-1, leads to a mechanical solution that become near to reality.:smartass: But since we also have a programmable part, we can add a few features. I can imagine a kind of teach-in, with which also a virtual center can be defined. The using of an Arduino opens really smart possibilities.:pilotfly: