Gunnars Driver
-
Posts
793 -
Joined
-
Last visited
-

Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
Ohh no . Rip dburne Thanks for the information, even if it was not one hoped -
Old post but still: There will not be Icing conditions in a snow storm. The snow is already frozen, or wet. Icing conditions happens in clouds, of fog or (barely) dense mist. Happens also from freezing rain or drizzle, but other than these = no.
-
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
Been out of the DVS for quite a while… does 2.9 work as before with MT and DFR ? Only need to update or is there any things needed to be done ? Didnt see anything on first page…. -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
Anyone having issue with the F-18 radar with either Varjo DFR of DCS MT? Did a little gaming today, and my friends didnt have any issues with the radar but I saw it omn the first flight with DCS MT and Varjo DFR, and I had it today also. The altitude numbers of the radar lobe at range is faulty, always same number for upper and lower limit, and the radar setting SILENT is boxed, which seems like it would be off. Sleving the lobe up and down dosent work, and also, it doesnt see anything. I now remember I didnt check that is was set to ON, but autostarted A/C have had it to on before. -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
There seems to be headroom for other adjustments, if the framrate is locked at 90fps. I saw a few pages back that there could be a problem with setting pheriferal resolution too low? What level is recommended by you guys that have tested this? (I do not use any vsync, and no motionsmoothing/reprojection etc.) -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
Nice! What settings do you use for the rendering (fovea/pheripheral) ? -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
Well, I made that update that came today. Started with steam openVR, worked just like before. Same frametimes, same fps, maybe a tad lower at low level over land. Then I tried MT again, after re-running mbucchias DFR setup. Now…. ….it works flawless. For 25 minutes of flying I had 90 fps all the time, even at mach 1 at low level and landed at senaki kohlki and still had 90 fps. Second test was pheriperal set to 0.8 and focus/fovea at 1.5, still 90 fps all the time I did not have a single stutter or like yesterday, frame time that cause the game to stop shortly….it just flows all the time. I think I always have seen the threes on ground move slightly choppy even at 90fps but now they actually flow around very smooth. I do not get how being GPU-bound and having good CPU overhead can turn into this, but I-m sure will not complain This feels like the biggest step forward since I started with DCS, so some very big thanks to mbucchia, dcs people and also you Supmua that is so helpful -Great work! -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
Just tried Steam OpenVR and it still works very nice, all settings still the same, so i might stay with that for a while. CPU framtimes 4-6ms same as before GPU frametimes 7-13ms, same as before average FPS not that far from 90, same as before. -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
I followed the guide for DCS multi-threaded via Varjo OpenXR, it seem to work like it should whennit cones to geting it to run with MT and DFR. Witouth any settings changed I did get (much) worse overall performance compared to the old steam openVR. (that turbo mode is still activated, will try it of. Never tryed Resizable bar). I did run the steam openVR without any sync to 45 etc, and did get 90fps most of the time, at low level overland about 75 (average in fpsVR about 87 or do) but just because the GPU frame time went slightly above 11.1ms, some 12-13ms. Gaming was of course not always 100% smooth but the stutter was ”proportional” to the GPU frame time, so not that bad. The CPU frame time was mainly 4-6ms and never ever above 9-10. With MT /DFR i can not see the frame times other than the built in DCS coubyer that shows CPU bound all the time. I get quite bad stutter from time to time, feels like frame times briefly goes well above 22 ms. Between the stutter I get 90fps sometimes but not as often as in ST with steam openvr. With no tools for evaluation, it feels strange going from Single thread with no CPU limitations but sometimes GPU bound to ”always” CPU bound as the DCS tool states. No DCS settings is changed.. Any tips where to begin sort it out? [Edit]13900/Z790/32Gb DDR5 6200mhz and RTX4090. -
If you follow the setup tips for new owners tge missalignment will dissapear. it is the standard Varjo setup that causes this. Read the setup information in post 1. I suggest beginking with B steam openVR. the setup is easy to follow and the win in experience is very good. https://forum.dcs.world/topic/300065-varjo-aero-general-guide-for-new-owners/#comment-4960863
-
I upgraded from a i9 9900KS OC:d to 5.2ghz to 13900KF/Z790/fast DDR5 and 4090. I run the 13900 in stock settings (no powerlimit time activated). From this point it seems like the CPU frametimes is not an issue anymore. No real need (no panic at least) for multithreading as the frametimes never comes close to being the limit. The GPU is the limiting factor, I have a OC version that I have clocked even further. This CPU is hot if no fix is done. I saw more than 90C on stress testing with a Corsair H150i with the stock thermal paste (was just a test, I newer use these). After lapping the CPU and using thermal grizzly conductonaut the CPU is about 10C cooler in stress tests, and running DCS or Assetto Corsa only reach 65-67C on the cores as the top value during gaming.
-
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
I did some intense tests ladt night. 90 minutes of Assetto corsa - no issues what so ever. I had that at least once/15 minutes before. DCS - I use the Steam OpenVR mod. Before I had the usb cable issue (now fixed) I had very good performance. More or less no stutter and the average fps was 87 or so. Now there is two ”red” (>22ms) framedrops coming in pair, about each 3-5 seconds. This causes bad stutter. I did use my reverb while waiting for the repair kit but no settings was really changed. I did a update to latest DCS Open beta (was just one hatch behind so no big difference. I also did one update to the latest Varjo Base. Thats it, I guess. Something isnt right now. Did they change anything avout the steamVR openVR settings? Resizable bar - I was skeptic when I did get the 4090, but after the new built computer I started with it on and everything worked very fine, so keeping it on. [Edit]An update: The basic issue was fixed with the repair kit sent from Varjo - It was probably the USB C cable thstnwas broken. Even better, I think I did find the issue with the disconnnections - It seems like the issue was a USB 3 hickup. After disconnection and uninstalling my Logitech Keyboard and mouse it was possible to play for 90 minutes without a single disconnect in Asetto Corsa. First time ever with the Varjo. I only tested DCS very briefly but it seems like it is fixed there too. -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
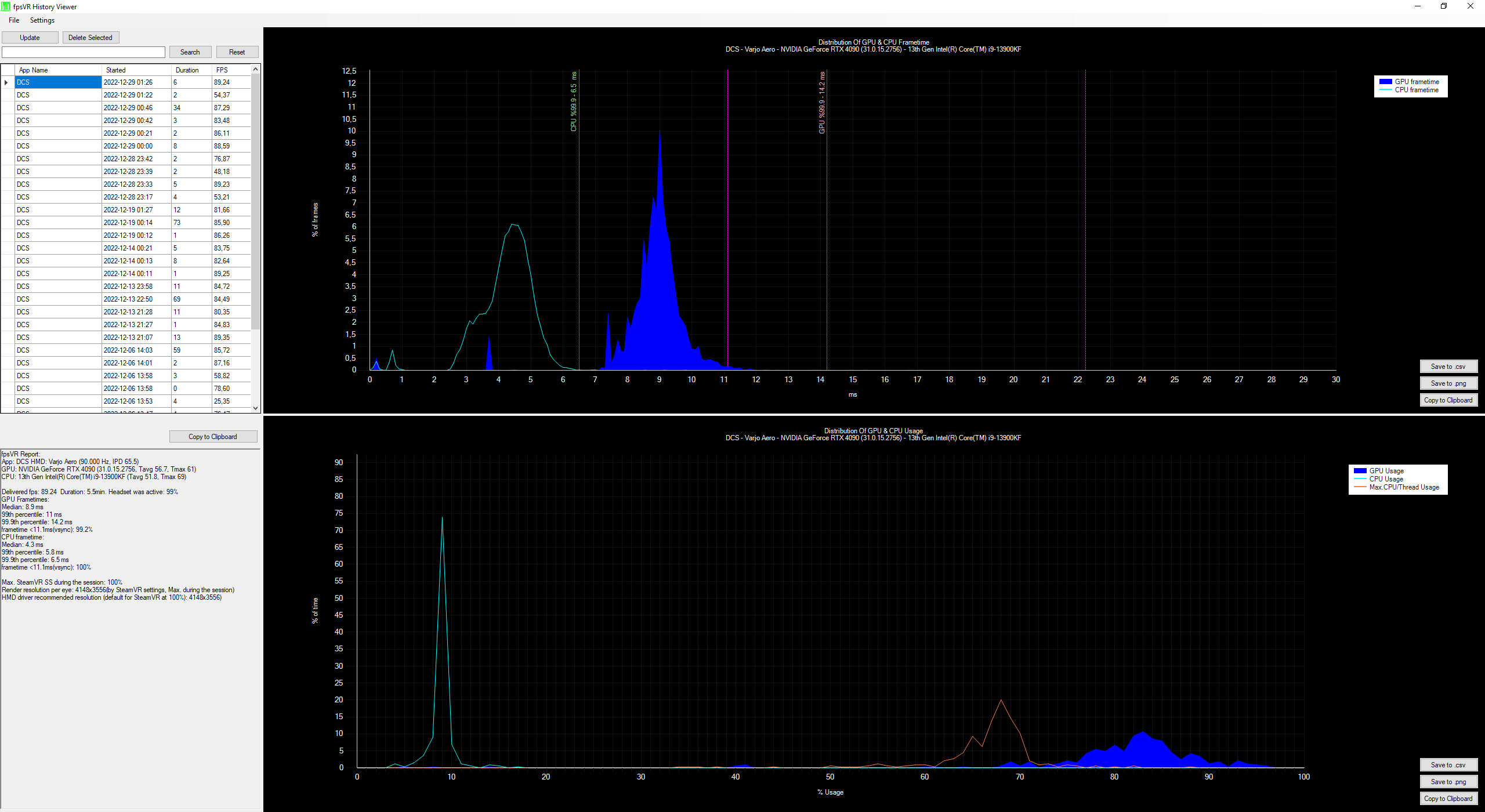
Well, the picture get all grey and the ipd adjustment moves like wehn the headset in started up/connected. If the fovea controlled rendering is set to always calibrate, that ipd/eye tracking calibration also runs. I did find though that if it was set to remember my calibration that part is skipped and the time from getting thrown out of the game is much shorter. In any case, as it takes 5-10seconds, in a car race its always a crash and in DCS it ia catastrofic 50% of the times it happens. For what I can understand it is a complete restart of the varjos. I did have this issue from quite early after delivery but I thought it would be a varjo base glitch, as my varjos was almost not used(had a very busy year last year). I noticed the sound get trown away also, so discord is out after a restart and the DCS sound reverts to the computer speakers. I did build a completely new computer just before christmas so the hardware is all new. It shouldnt be something like that I guess. Only one week left until the one year day when the warranty goes out so I need to sort it out asap. I have made a support request, but I think I need to know a little more, thats why I ask. The motion smoothing seems hopefull. As most other headsets have it it would be strange if varjo could hang on to that train. I'm actually a bit surprised about it taking so long. My computer upgrade was partly because there was no reprojection and I am sensitive to non smooth gaming. After the upgrade is mostly works very fine. I dont always have 90fps but quite often and when below it mostly is not very low numbers and noth very much stutter. I attached a fpsVR report, showing the numbers.
-
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
No, no message. At one of the outs I know I was sitting still without head movement. I have these during a racing game also. Not much head movement at all then. -
Varjo Aero: General guide for new owners
Gunnars Driver replied to Supmua's topic in Virtual Reality
I have a problem that is extremely anoying. Earlier I thought it might be the Varjo base that was not 100% stable. In game, the headset shuts down (grey out to completely grey color) and restarts and the movement of the leanses can be heard. Then it works again, but this takes a few seconds and is not complatible with racing games at all --> guaranteed to crash. Its not that good in DCS either. I had a USB cable issue, and contacted the support. Got a new cable and my hope was that this was the same issue but it was not. With a new USB cable and a new "box" where you put the USB cable this issue is still there. I had two of these blackouts today, about 1.5hours of DCS. Is this a common issue, anyone else having it?