Search the Community
Showing results for tags 'fcs'.
Found 4 results
-
 Hi, This thread is about the FCC OFP version 10.7 control logic implemented in DCS, and it's missing important features. Several observations (currently as of 2.9.4) show that a core function, which is described as 'Opposite Differential Stabilators for Roll', is not implemented. This function utilizes adverse yaw to generate yaw rate, enhancing roll coordination and performance at high AOA. A description of opposite diff-stab function, quoted from reference [2]: A description of the sluggish roll performance of v10.5.1, quoted from reference [1]: Video evidence of Opposite Differential Stabilators, from 0:42: This would be very useful in generating proverse yawing moment in the direction of intended yaw, increasing the yaw/sideslip maneuverability of the Hornet at elevated AOA, which is currently lacking in DCS. References: 1. Mitchell, Eric John, "F/A-18A-D Flight Control Computer OFP Versions 10.6.1 and 10.7 Developmental Flight Testing: Out-of-Controlled Flight Test Program Yields Reduced Falling Leaf Departure Susceptibility and Enhanced Aircraft Maneuverability. " Master's Thesis, University of Tennessee, 2004. https://trace.tennessee.edu/utk_gradthes/2372 2. Park, David J., "Development of F/A-18 Spin Departure Demonstration Procedure with Departure Resistant Flight Control Computer Version 10.7. " Master's Thesis, University of Tennessee, 2004. https://trace.tennessee.edu/utk_gradthes/2312 3. NATOPs manual which is not quoted here but contains relevant info.
Hi, This thread is about the FCC OFP version 10.7 control logic implemented in DCS, and it's missing important features. Several observations (currently as of 2.9.4) show that a core function, which is described as 'Opposite Differential Stabilators for Roll', is not implemented. This function utilizes adverse yaw to generate yaw rate, enhancing roll coordination and performance at high AOA. A description of opposite diff-stab function, quoted from reference [2]: A description of the sluggish roll performance of v10.5.1, quoted from reference [1]: Video evidence of Opposite Differential Stabilators, from 0:42: This would be very useful in generating proverse yawing moment in the direction of intended yaw, increasing the yaw/sideslip maneuverability of the Hornet at elevated AOA, which is currently lacking in DCS. References: 1. Mitchell, Eric John, "F/A-18A-D Flight Control Computer OFP Versions 10.6.1 and 10.7 Developmental Flight Testing: Out-of-Controlled Flight Test Program Yields Reduced Falling Leaf Departure Susceptibility and Enhanced Aircraft Maneuverability. " Master's Thesis, University of Tennessee, 2004. https://trace.tennessee.edu/utk_gradthes/2372 2. Park, David J., "Development of F/A-18 Spin Departure Demonstration Procedure with Departure Resistant Flight Control Computer Version 10.7. " Master's Thesis, University of Tennessee, 2004. https://trace.tennessee.edu/utk_gradthes/2312 3. NATOPs manual which is not quoted here but contains relevant info.- 2 replies
-
- 6
-

-

-
- flight model
- wip please read roadmap
- (and 2 more)
-
Currently in 2.9.2, whenever a sideslip is recreated by just rolling the aircraft at a speed around 400 knots, the rudder slaps hard to reduce the sideslip and results in a long-lasting yaw oscillation, as if yaw damping doesn't exist, which I found unacceptable from a handling quality point of view. According to section 9.1.3 Directional Auto Flap Up CAS from the NASA technical memorandum 'Simulation Model of a Twin-Tail, High Performance Airplane' (https://ntrs.nasa.gov/api/citations/19920024293/downloads/19920024293.pdf), the yaw rate (multiplied by cosine of angle of attack) feedback component is used to augment the Dutch roll damping. In the case of DCS, the oscillation is caused by the rudder itself, indicating either it is over-gained (system unstable/phase margin too low), or a wrong type of feedback (sideslip) is used according to another report https://forum.dcs.world/topic/338130-the-rudder-should-not-be-using-sideslip-feedback-for-yaw-dampening-causing-a-very-slow-yaw-response F18 yaw oscillation.trk
-
.thumb.jpg.4bdd9821192c10235482cd93c5541168.jpg) Subject. I do not have any real data, but these oscillations look and feel weird when doing a basic crank maneuver. Oscillations are less violent when you are slower. Added: on 0.9M it feels nice and smooth. I think the current FCS implementation can't keep up on 1.4+. Have added second track with full stick deflection. F-18-oscillations.trk F-18-oscillations2.trk
Subject. I do not have any real data, but these oscillations look and feel weird when doing a basic crank maneuver. Oscillations are less violent when you are slower. Added: on 0.9M it feels nice and smooth. I think the current FCS implementation can't keep up on 1.4+. Have added second track with full stick deflection. F-18-oscillations.trk F-18-oscillations2.trk -
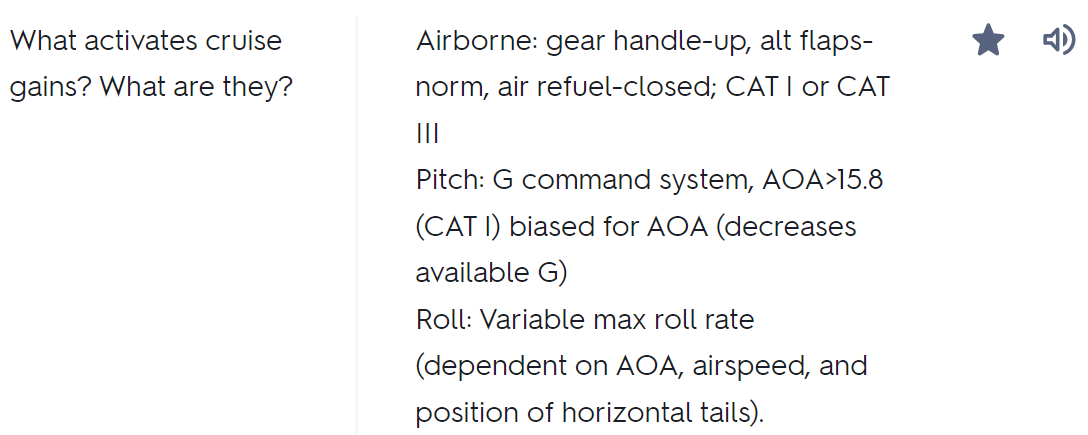
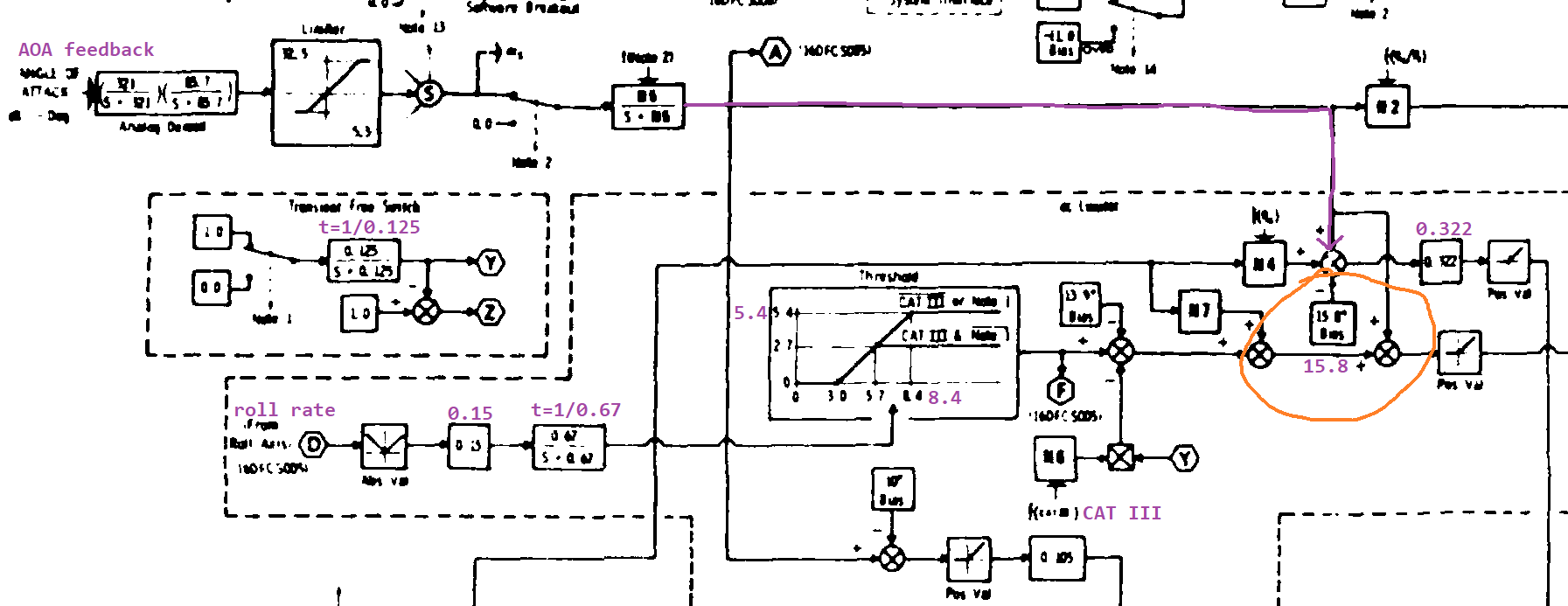
Just a minor bug in the CAT I Limiter. The blended AOA feedback bias used in the g-command system is not correct for the FLCS version we had. According to Figure 3.1 Longitudinal Control Block Diagram from the DTIC paper 'F-16 Simulator for Man-in-the-Loop Testing of Aircraft Control Systems (SIMTACS)' (https://apps.dtic.mil/sti/citations/ADA189675), the AOA bias used for an initial g-command reduction should be 15.8, but not 15.0 as currently is in DCS. This results in a lower AOA limit than expected. The figure is also backed up by the publicly available FLCS flashcard (https://quizlet.com/309832047/flcs-flash-cards/), which states that the G command system decreases available G when AOA > 15.8 (CAT I). The current 15.0 bias is seems to be used by a very old version of FLCS. 16CM g-command should not be reduced until 15.8 AOA.trk