engines
-
Posts
64 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by engines
-
Not sure exactly, but I would guess high hundreds at least.
-
Quick photo dump! About 100 hours of use and most of the kinks are ironed out. More to do.

-
I started working on the final wiring, which involved changing all the wires from the 2mm JST connectors to DSUB terminals to fit onto the Arduino shield I designed. Unfortunately I noticed that I messed up the PCB design, so I have to re-do the shield.
-
Here it is in DCS for the first time, just testing the axis and parking brake:
-
This is mine versus the grip above. The one from the real aircraft below.
-
That would be great. I'm based Pacific Northwest and won't bein the UK until May based on my current plans. If you can get a couple of measurements like the total length or diameter, that'll be enough to get me in the right ball park.
-
When I scaled the drawings for the grip, I made the assumption that my reference drawings had a thread size of 1.5" at the base of the grip. The resulting grip always felt a bit too large. It turns out, from a ln obscure reference someone dug up with drawings of a training simulator, that thread was 1.25" meaning my part was oversized by 20%. Having corrected for this, the new grip feels closer to what I was expecting (noting my only real reference is from an other jet type I've worked on). If anyone here has sat in either a real Harrier GR7/9/9a, AV8B, or their respective simulators, can you tell if the lower photo looks right?
-
No custom programming, per se. It's all very basic Arduino libraries. The sensors have a small range of motion, so I have the magnets right down near the pivot point.
-
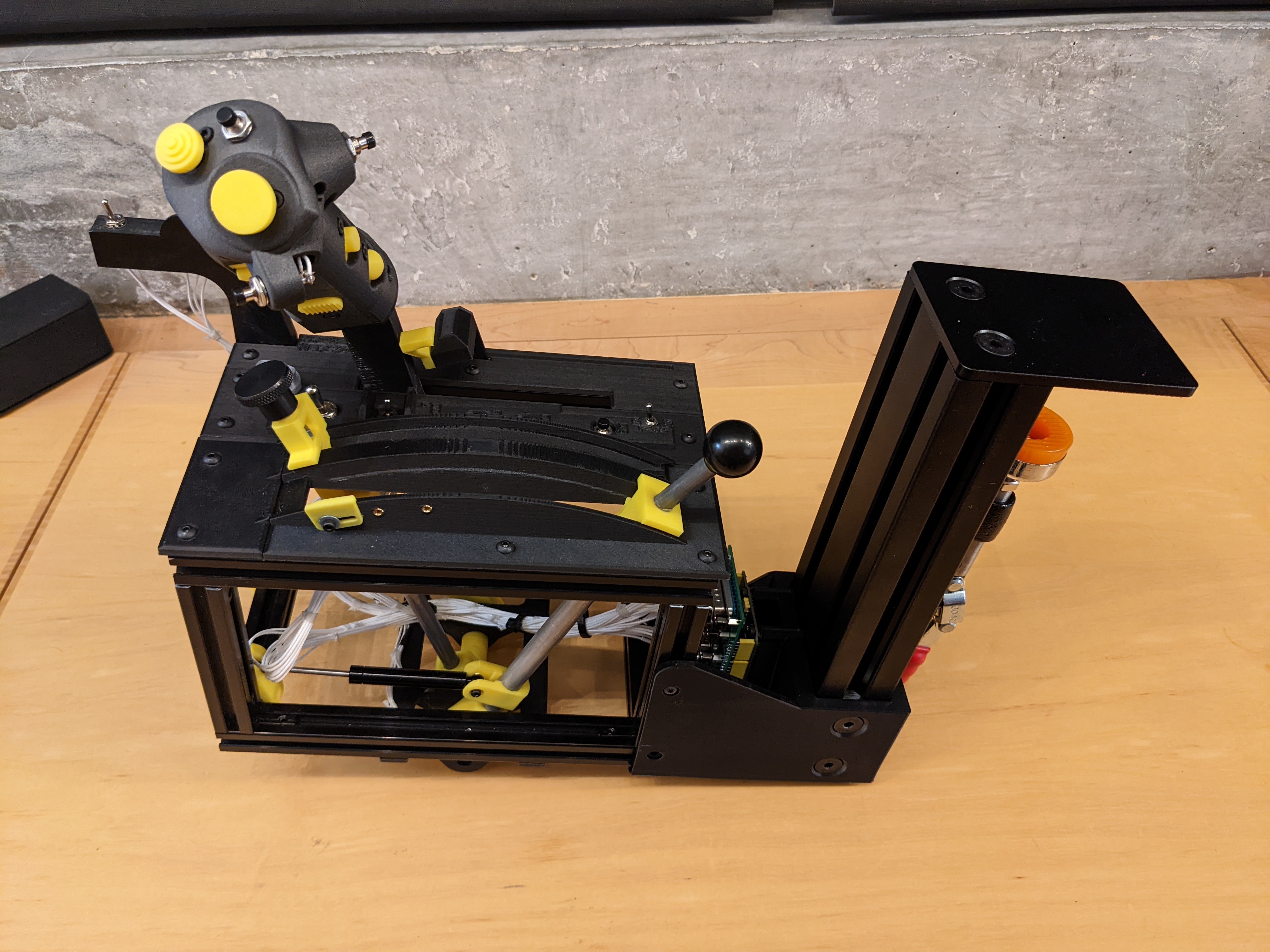
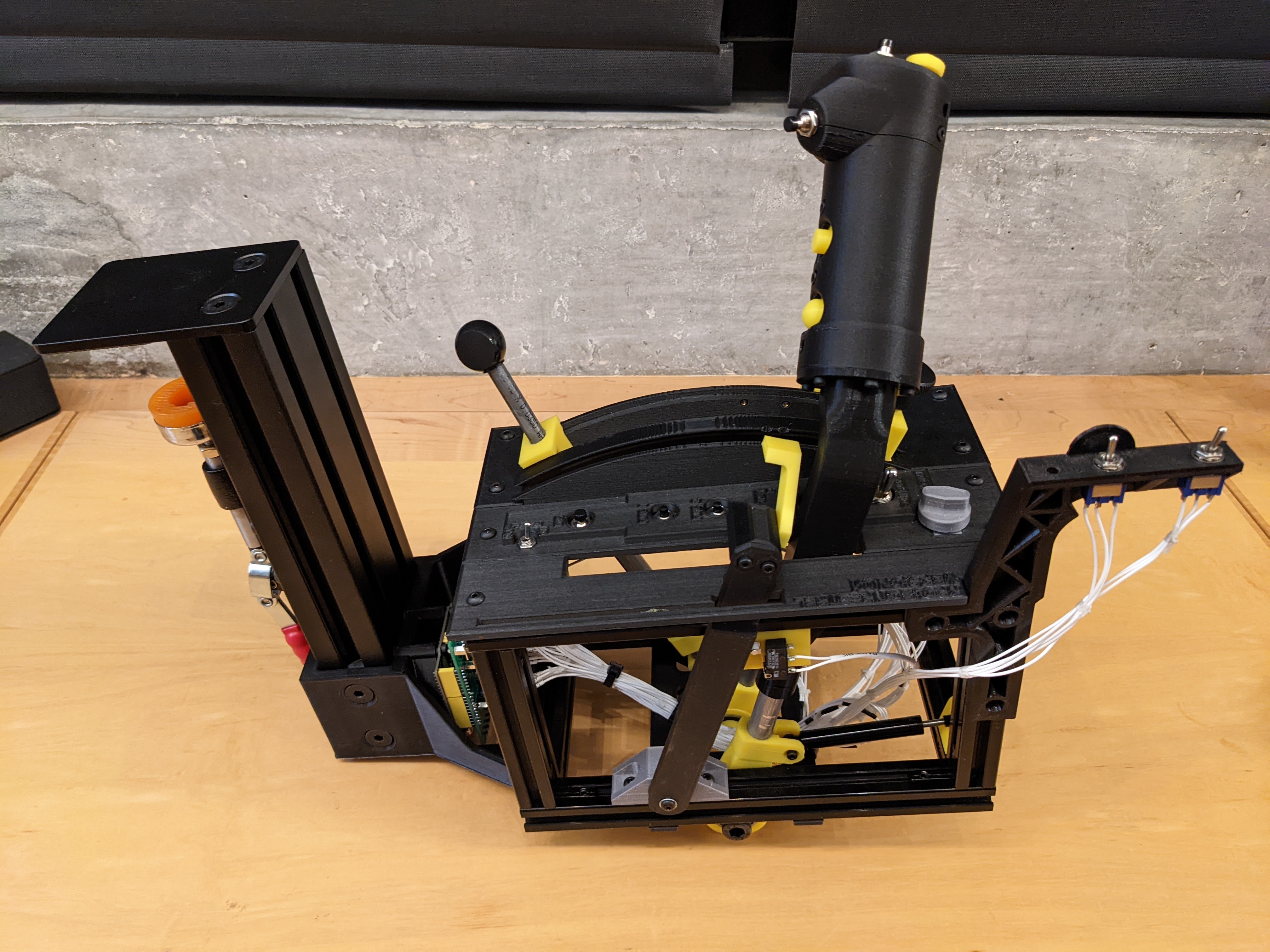
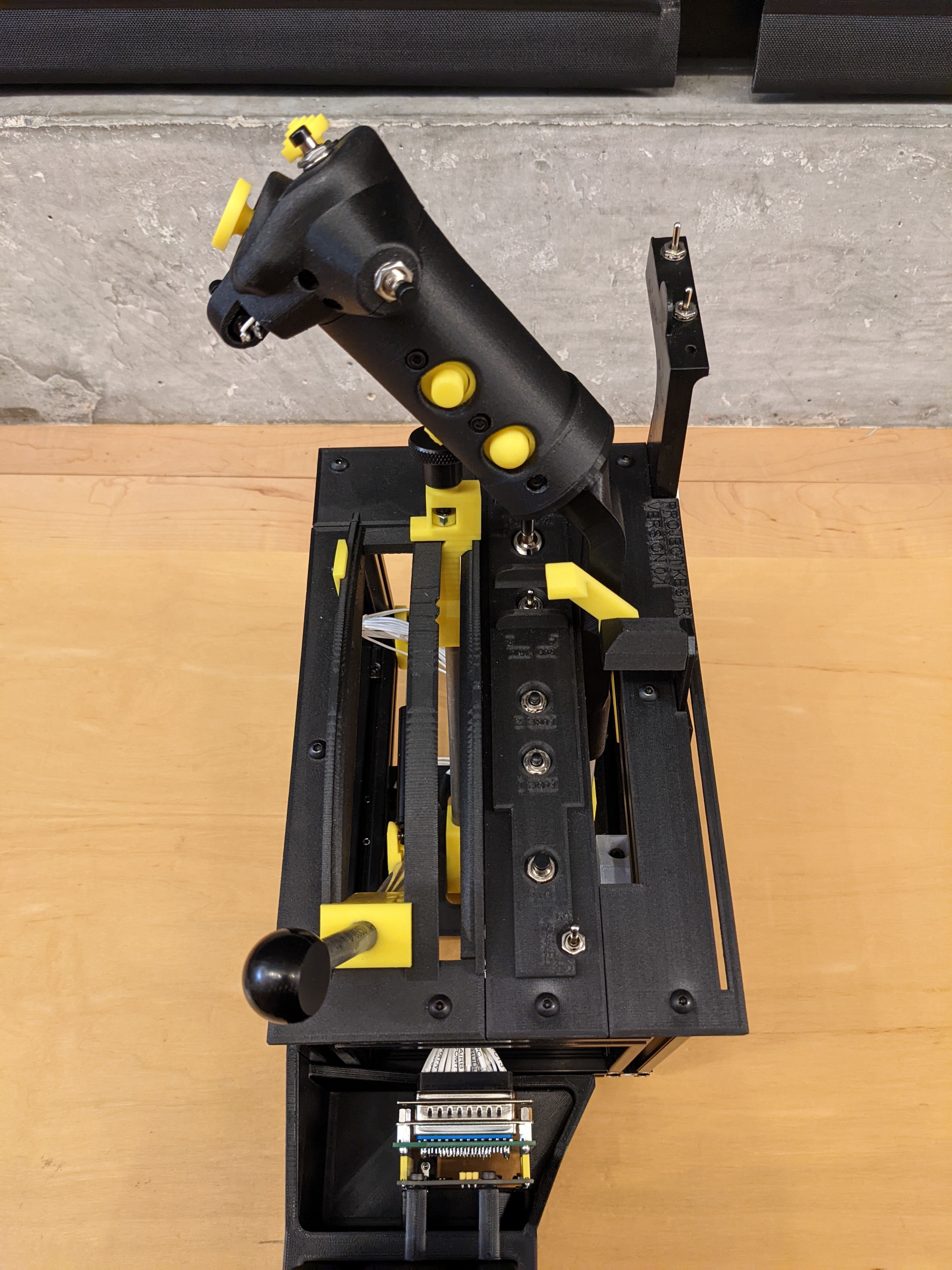
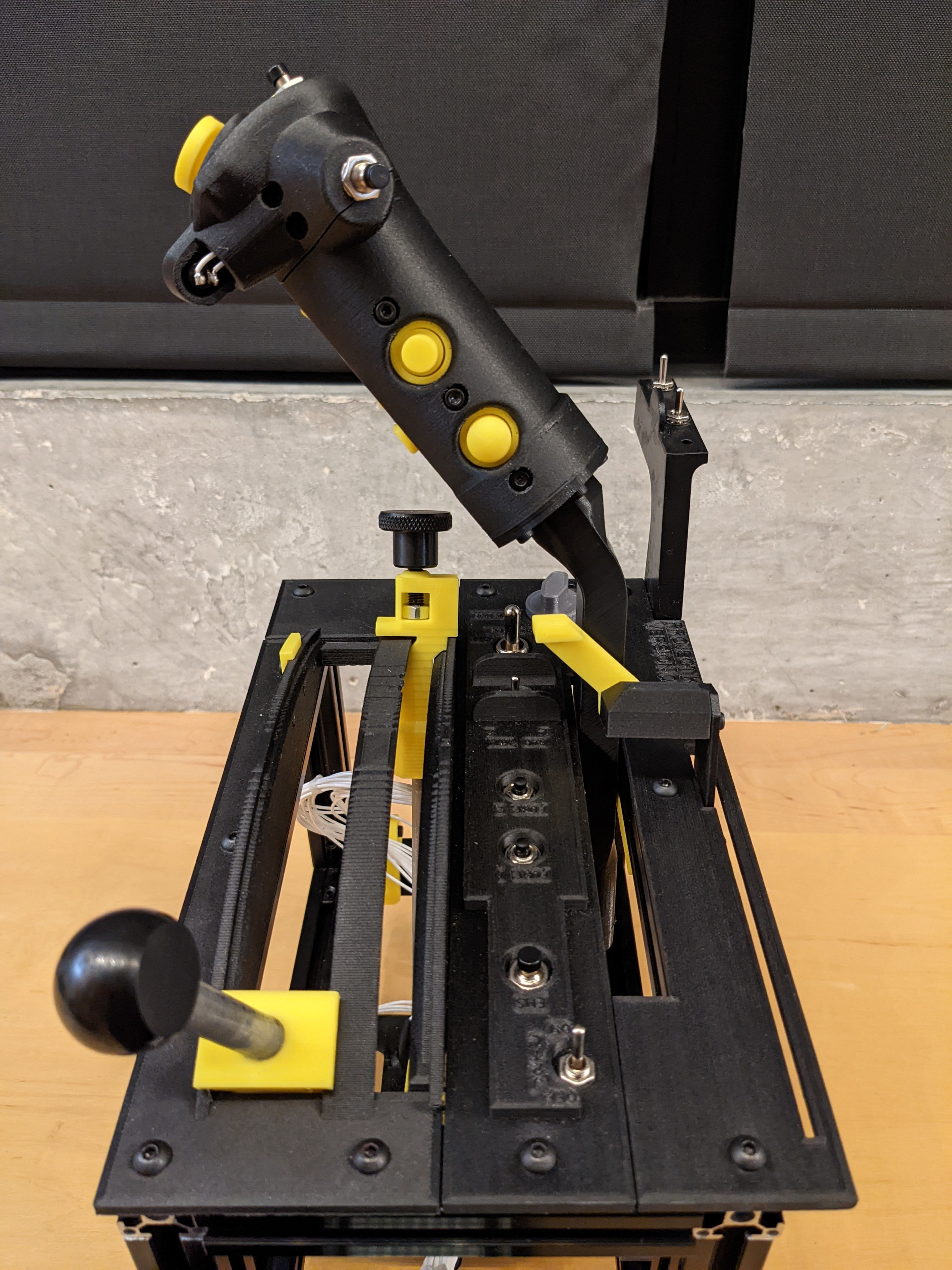
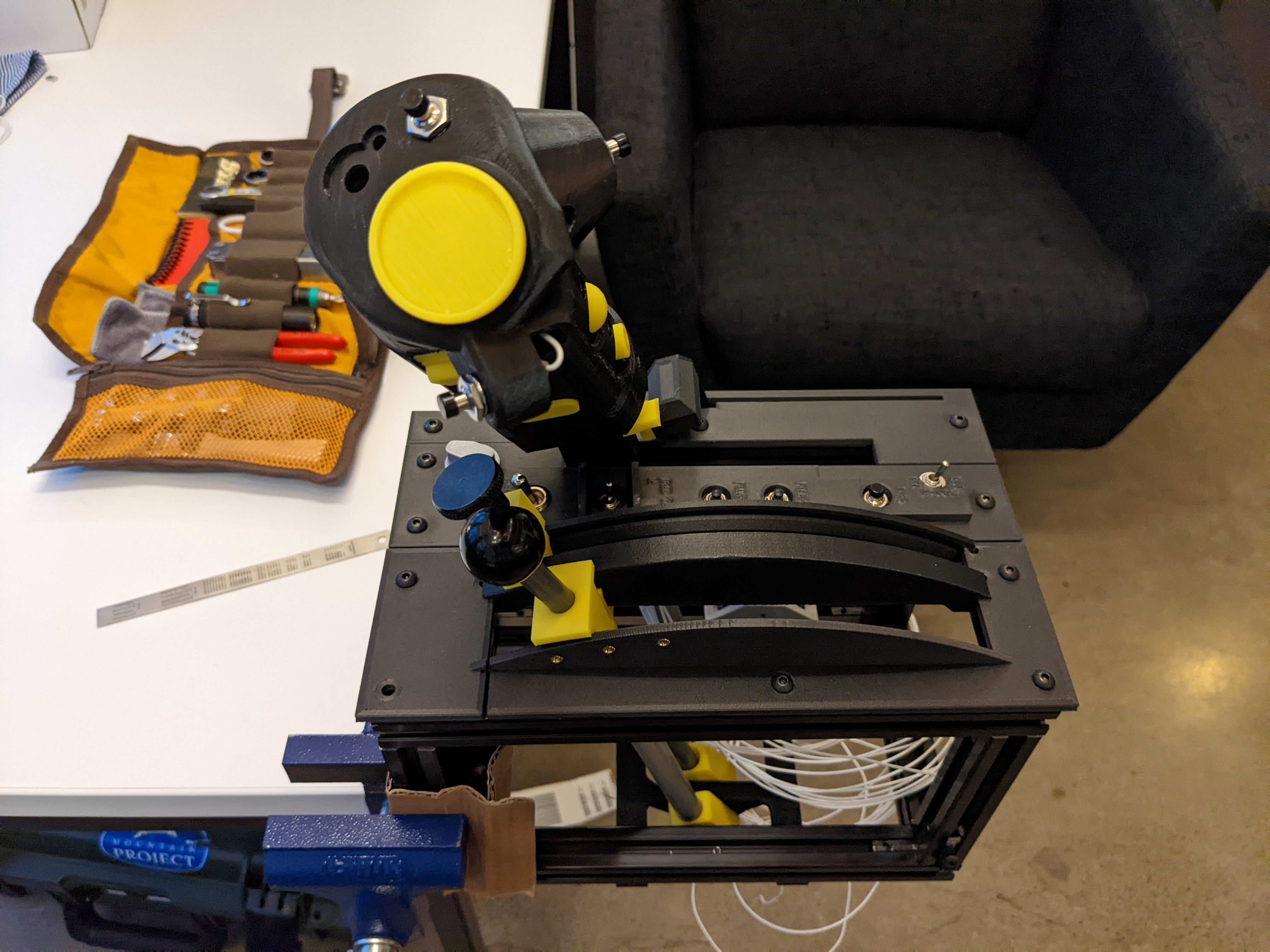
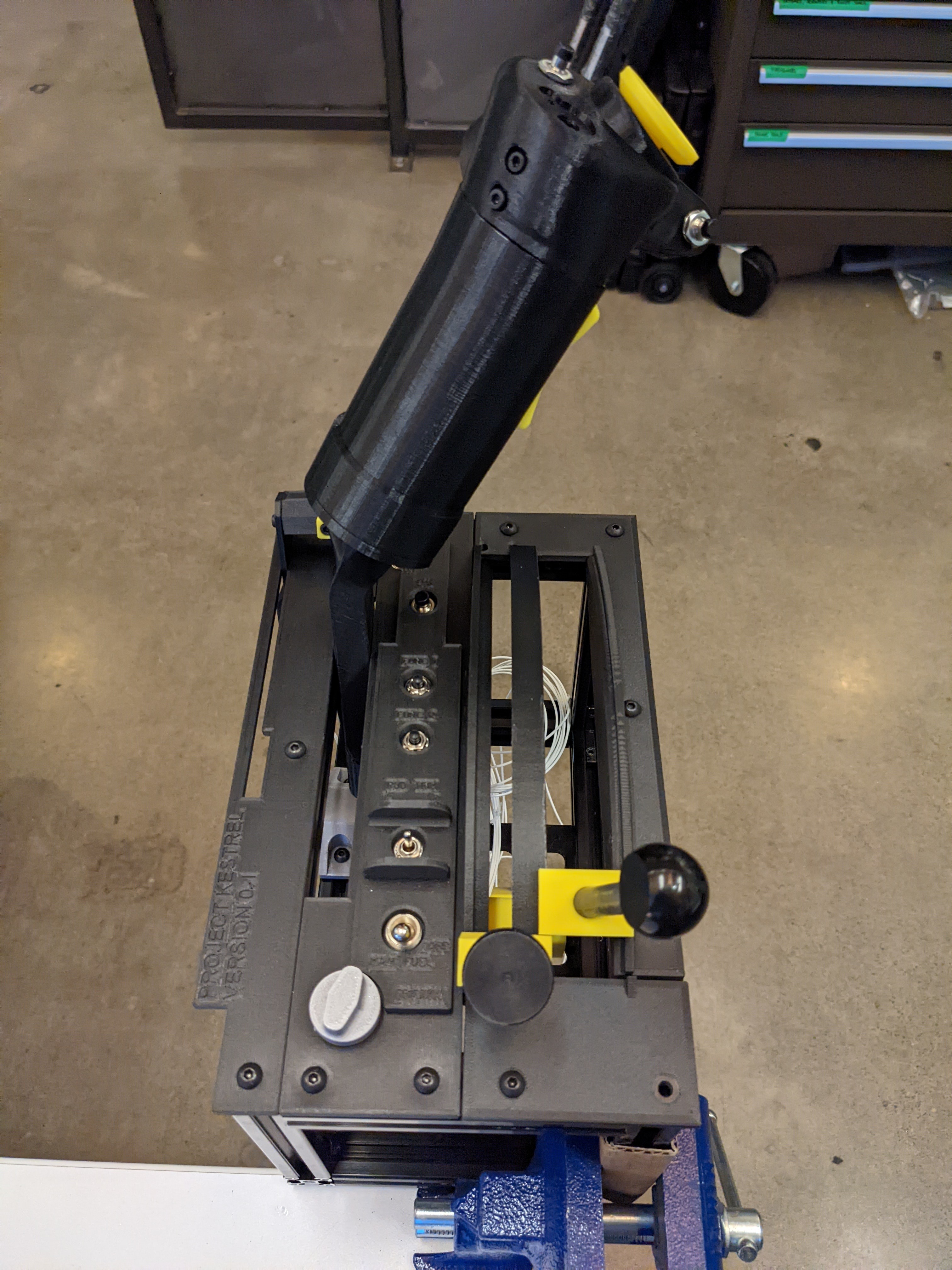
Quick progress update now that I have most of the structure in place. The photos below aren't the final configuration as I need to redo a couple of parts, but for the most part it's complete. Each of the three rotational axis will be using the hall effect sensors. Once I've adjusted a few aspects of the moving parts, I will be ready to functionally test. I've scrapped the original friction assembly as I couldn't get it to apply enough force within the geometry constraints I had, so I will be resorting to a small damper which will arrive next month. Some more photos from the front aspect.
-
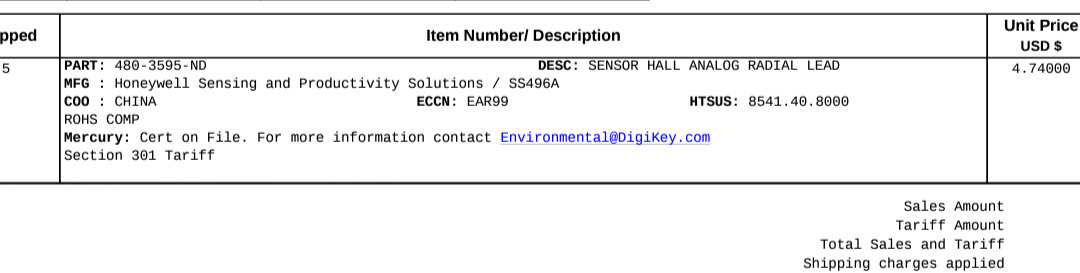
Quick clip showing the smooth action of the hall effect sensor here: And attached is the sensor details. It's used with an 8mm cube magnet.
-
I've been working on a simple, reliable friction mechanism. This version uses a toothed belt (from a recycled 3D printer), belt tensioner, and a lever pushing on the throttle pivot block. This way I can use the friction knob as it was intended while keeping moving parts to a minimum.
-
It may have moved. I'll have a better one up at the end of the week with (hopefully) a functional friction mechanism. The only metal is for the M4 inserts and the screws themselves. The grip is made from PETG for better surface finish and durability, but there is internal structure that holds it all together that is using ABS for higher modulus of elasticity. From the prototypes I've made so far, it seems to be strong enough, although I reserve the right to change my mind once I get some use out of it. I've just got the grip head section to a point where I'm reasonably happy with the structure. There will have to be a few more revisions to get the hat switches properly mounted though.
-
A quick peak at the unit attached to my chair.
-
What an honour to have been at the recommissioning! I was in HMS Illustrious for a short time, and HMS Ocean for a more substantive period when I was early in my Fleet Air Arm career. I also spent some time working with the company of HMS Queen Elizabeth when she was in build and out for trials when we were putting the F-35B through test and evaluation. I should note that due to the period I served as a WAFU, most of my deployed time was in a tent in a land locked desert, so I'm not an authority in the blue water aspects of naval aviation! What you said about EMCON silent for the carrier makes sense and I think that's the strategy employed by Sandy Woodward during the Falklands conflict where the Type 42 destroyers and 22 Frigates were the main pickets for fleet air defense. Interestingly the carriers still had their on Freddies and even the Queen Elizabeth class carriers today have the same radar system used on the Type 45 destroyers. I guess due to the smaller size of the Royal Navy compared to the US Navy, it's more likely that our carriers could potentially be deployed without a dedicated destroyer, whereas I think that would be unlikely in the USN as there are enough assets to fill that role. I think the other strategic difference between the US and UK with regards to carriers is that we opted for gas turbine propulsion rather than nuclear so we could put the ships alongside in friendly countries. Also, the maritime strategy is, where there isn't a direct anti-ship threat, to get the carrier 12 nautical miles off the coast before the conflict heats up to make a statement. I think the request to have carriers and destroyers be able to act as AEW and give BRAA calls is a reasonable one, even if, in certain scenarios like day one of a large scale conflict, the carrier would be EMCON silent.
-
I guess that's a national thing, I know for certain that Brit carriers do have fighter controllers aboard, as do the destroyers. I can't speak for the US carriers.
-
Oh, wow, that's a good start! Is there something in particular I need to do to set this up?
-
But you can't call up the carrier on the radio and get BRAA calls though, right?
-
That's exactly it. It prevents spurious inputs when a combination of buttons are hit simultaneously.
-
Apologies for bumping a very old thread, but I'm trying to understand if a modern day "Freddy" can be replicated. Freddy is the Royal Navy term for a Fighter Controller on a ship. They would essentially do the job of "AWACS from a carrier (or destroyer)." I have looked at MOOSE/MIST and various other scripts to see if this is possible as I am running a group of Carrier-based Harriers and I would like to train up in very basic airborne interdiction. So to bump the question, can DCS be configured to have a surface unit exhibit the same behaviour as an AWACS to mimic what I am referring to as a Freddy, or Fighter Controller?
-
If I can get them to a good enough standard, absolutely.
-
I'm redesigning this to make it more print and manufacturing-friendly.
-
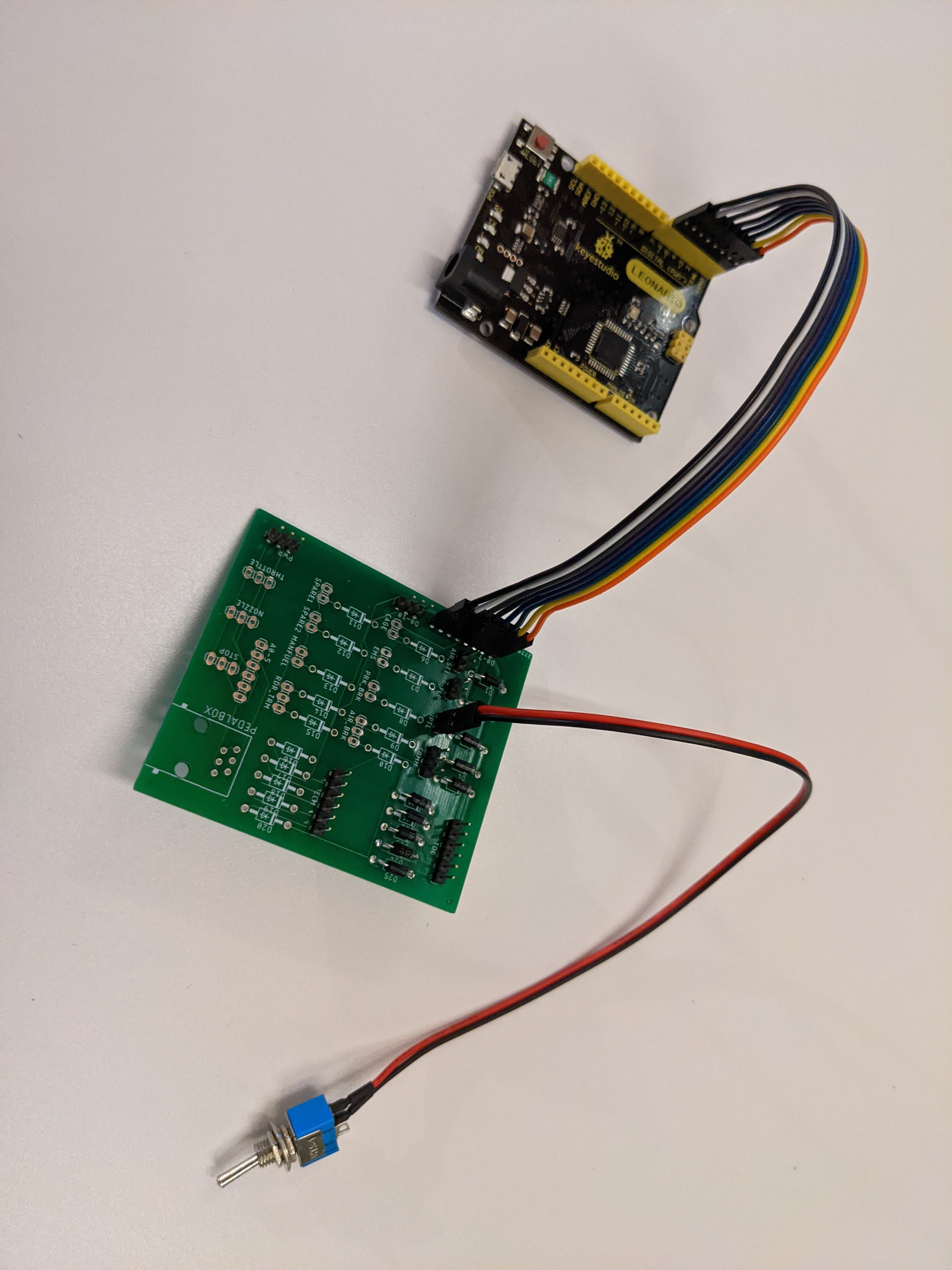
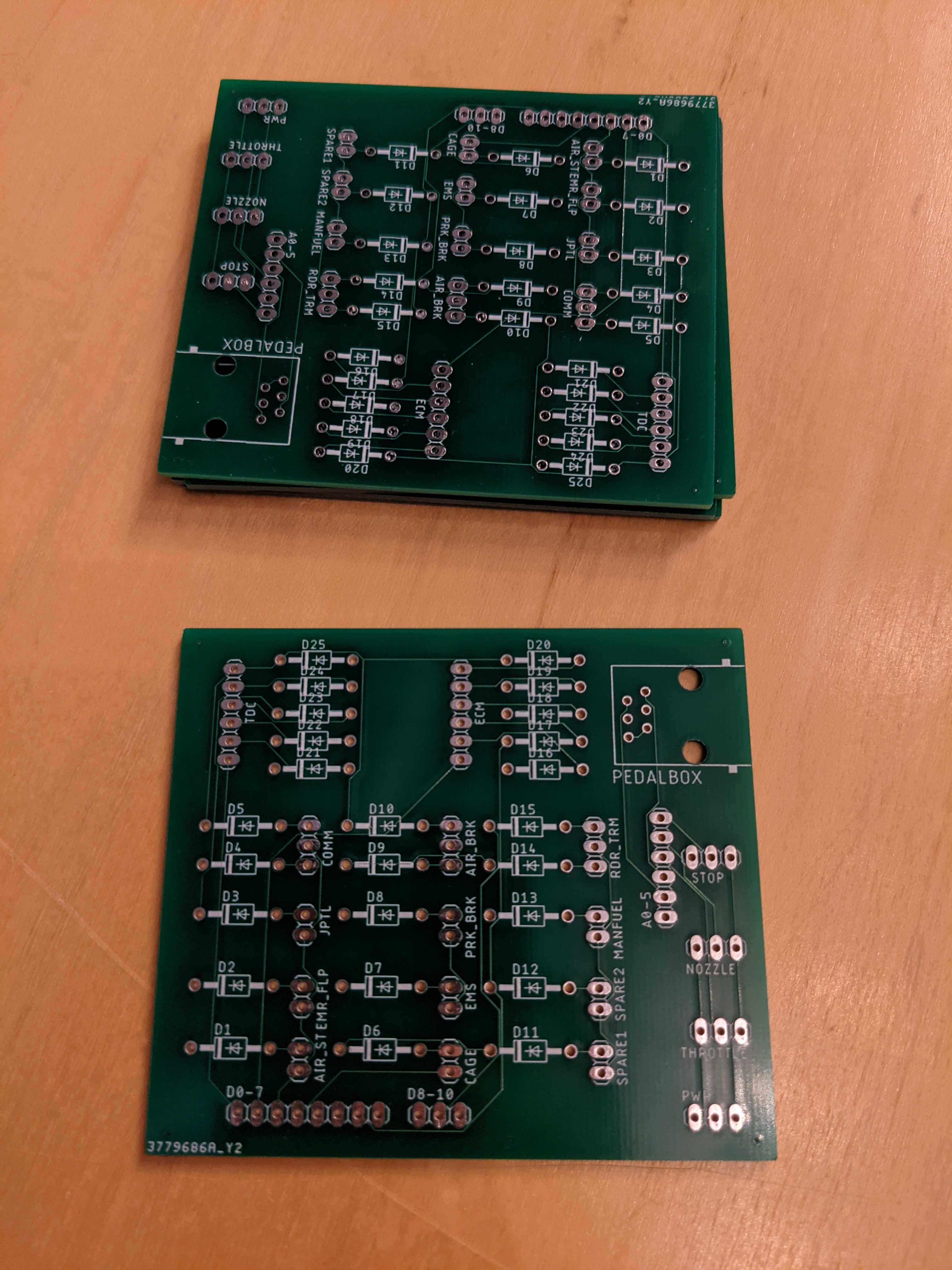
Functional testing of the input matrix is looking good so far. I've only tested a couple of the digital inputs to verify the board and code works. I'll have to look at the analogue stuff next while I wait for the rest of the diodes to arrive.
-
Custom "button matrix" PCBs for the inputs. I feel like I should have increased the trace size from default. We shall see.
-
Some test and assembly prints are ready.