towsim
-
Posts
658 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by towsim
-
To all Aries Radio users, I have to apologize for being inactive the last week, since a lot of people are waiting on the MIG21 mod. The reason was a serious crash of my development computer which needed external maintenance. Meanwhile I got the computer back and all works normal. Sorry...
-
@Random If you installed the application with the normal installer, you should not have a problem. If you want to disconnect Aries radio it is recommended to use the TS3 menu Plugins/Aries Radio/Export.lua entry on/off. If TS3 does not find the C:\Users\[name]\Saved Games\DCS\Scripts\export.lua then you have an exceptional installation. Check the following registry entry HKEY_LOCAL_MACHINE/SOFTWARE/AriesWings (64 bit registry). There should be the variable DCSsavedGames. It contains the path to the SavedGames folder. The default path should be C:\Users\[name]\Saved Games\DCS. If it does not match your Saved Games location, you should enter the correct path. Use caution, every modification in the registry may corrupt your computer system.
-
That should be possible. While DCS World and Open Beta can be installed with the installer, an additional installation needs some manual copying. The simplest way is to copy the entire DCS World\AriesWings folder to the same place in the additional DCS installation. Then locate the Saved Games\DCS\scripts folder of your additional installation. Copy the export.lua from the normal installation to that folder. If the folder does not exist, you need to create it. That's all. The only disadvantages are, that the connect/disconnect function from the teamspeak client does not work for the additional installation and the configurator works not for the additional installation. But if you copy AriesAirborneRadio.ini from your normal installation, you have all the settings available.
-
As announced yesterday, a new LUAC file to compensate the DCS radio mismatch for the Dora: the attached AriesRadio.luac (AriesRadio.zip) has to be copied to \DCS World\AriesWings. The only important change is a device ID change from 16 to 15. The Dora is tested and works normal now. The update with the MIG-21Bis will follow shortly. Thanks Esac_ mirmidon AriesRadio.zip
-
We did not test all types up to now. This will be done this night. During my development today, I worked with the A10C, MIG21 and FW190. FW190 had a bug with the new version and is fixed meanwhile, A10C works normal and the MIG21 is under construction.
-
It seems, that the device ID for the FW190 radio was changed from 16 to 15 with the latest update, without any warning. I have fixed the bug internally. We will have additional tests this night. If nothing comes up, I will publish a bug fix tomorrow.
-
You have two choices: spread the view over 3 monitors ( for DCS only one monitor is defined, which covers the entire desktop). Your FPS will drop to about 25 FPS regarding to your current 53 FPS. This view will give you a distort impression because you have only one big view window. A view angle more than 90 degrees is almost not usable. The other possibility is to define 3 view channels of 60 degrees (3 monitors for DCS). This view is not perfect, but ways better than one big window. This drags the frames down to about 15 FPS. Because DCS has to calculate the view 3 times. You have to play with the option to increase the FPS if it is possible.
-
The heli pilots actually have a procedure how to compensate the tail rotor. The procedure is part of the training course and is called 'Simulated anti-torque fixed right pedal' . The details are as follows: The main advice to turn the nose from right to center is to reduce throttle to minimize torque, reduce collective, increase airspeed to the minimum airspeed for directional control. The entire procedure starts on crosswind by informing ATC about the procedure (priority in traffic). On downwind , the procedure is discussed with the flight instructor. The final is intercepted at 800 feet AGL with 60 KIAS. On final, the flight instructor holds the right pedal 10 degrees to the right of the aircraft heading. The approach heading should be established with 20 degrees to the left from the runway heading while the track is the runway heading. When a shallow approach angle is intercepted, decrease the collective to maintain the angle. Progressively decrease airspeed to determine minimum airspeed for directional control. Once the speed is determined, hold the speed until touchdown. At touchdown, retard throttle to align nose with the runway heading (minimized torque) . Apply collective to cushion landing. After touchdown, maintain heading and ground track with collective, cyclic and throttle. The procedure was published as part of the helicopter training of the US Army at Ft. Rucker, Alabama.
-
For those, who installed the latest Version (1.949) of the Gossip Box. There is a bug, located in the AriesRadio.dll for TeamSpeak 3. If more than one user is speaking at a time, a terrible background noise is audible. The noise is created even if the Gossip Box is not active. The attached AriesRadio.zip contains the bug fix. Copy the AriesRadio.DLL to C:\Program Files\TeamSpeak 3 Client\plugins or wherever TeamSpeak was installed. Sorry for this inconvenience... AriesRadio.zip
-
The glow lamp has no function in DCS up to now.
-

buying new pc, how many cores will edge suport ?
towsim replied to LarryElder's topic in PC Hardware and Related Software
I would sign that. I observed the competition between Intel and AMD over the years. Intel was always a bit ahead. We always used Intel for our image generators. But to build up a test environment would let my wallet stall. After thinking a bit over the two cores statement, I have an assumption where this could come from. The two most power requiring threads are the graphics server and the audio server, if I can trust the rumours. Since Windows is not that perfect while spreading the threads evenly, it could happen, that the two threads are given to the same core. Then it would make sense to avoid such a situation by assigning the thread intentionally to different cores. This is an function offered in the Windows API. But the remaining cores would still be used by other simulation threads. As I said, it is an assumption. Probably , anybody else has proved information. I have no hope, that ED would comment this statement. -
How on earth do people afford 3ds Max?
towsim replied to Buzzles's topic in 3D Modeling for DCS World
3D Max would be perfect if there wouldn't be the price. But there is a similar software, which should be sufficient for designing aircraft and other simulation objects. G-Max is a derivative of 3D-Max with some limitations. It is delivered as freeware. The handling and the GUI is almost the same like in 3D-Max. I would estimate 80% of all FSX developer use G-Max. The only limiting factor is the format of the resulting files. But there are a lot of free converters available. Have a look the FS Developer Forum or go directly to http://www.turbosquid.com/gmax. -
buying new pc, how many cores will edge suport ?
towsim replied to LarryElder's topic in PC Hardware and Related Software
@Pilotasso 4 cores. @Gloom Demon Leave all 6 cores active and overclock them. I bet this configuration will win. The question was, do more cores increase the performance. Overclocking is another thing, which can be done in addition. It is not nor or neither. -
buying new pc, how many cores will edge suport ?
towsim replied to LarryElder's topic in PC Hardware and Related Software
The result seems to be linear in a certain way, if fps are compared to number of cores. But this has an upper limit, where additional cores do not increase the performance anymore. I forgot to mention, that a multi core environment has a small trap door. It can happen, that windows delivers the most power requiring threads to the same core. In this case, the advantage of additional cores is gone. I experienced this in an Windows XT environment with two graphical adapters and two separate CPUs. Both adapters were served by the same CPU, which led into overheating of the stressed CPU. But I never observed this with Windows 7 (never tested Windows 8 ). The two pictures show the same stress test with 4 cores active. The frame rate is any what around 40.
-
buying new pc, how many cores will edge suport ?
towsim replied to LarryElder's topic in PC Hardware and Related Software
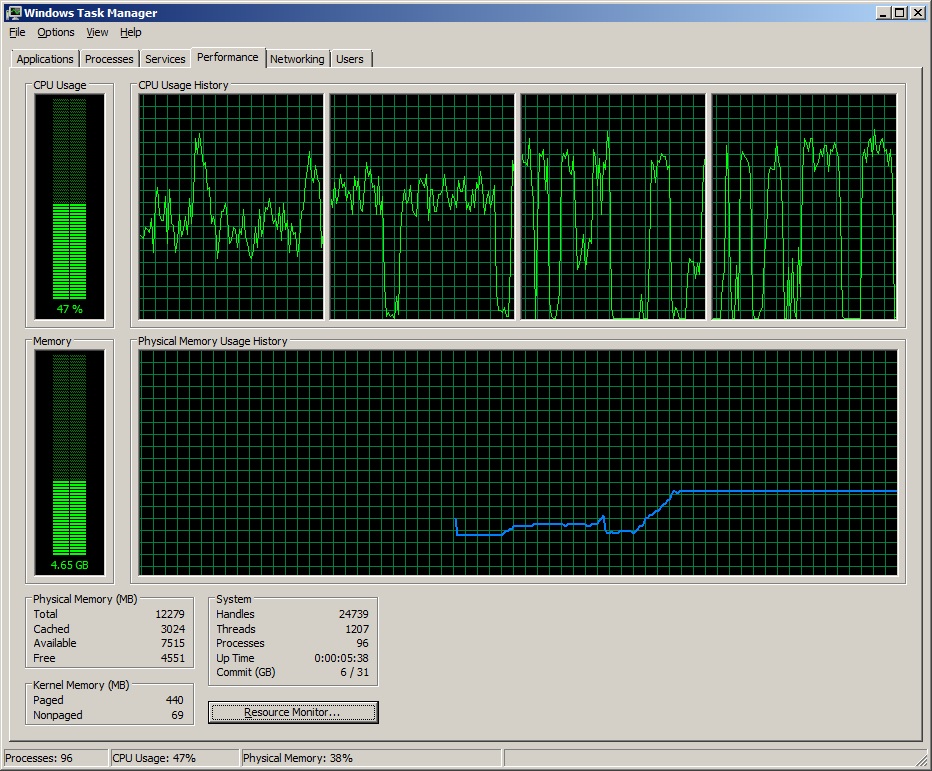
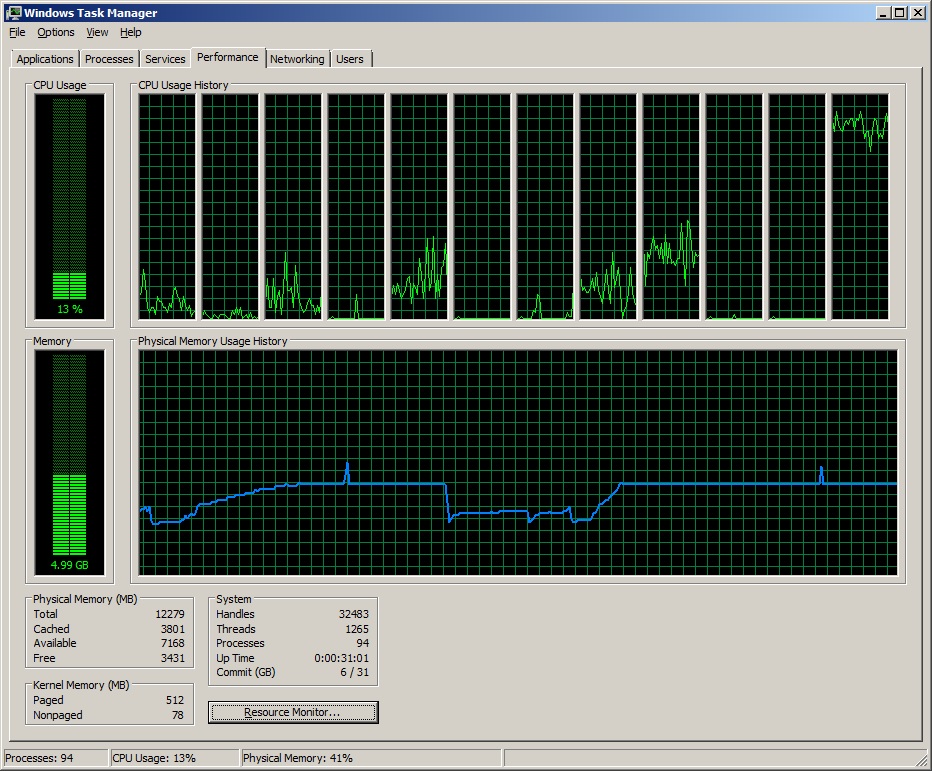
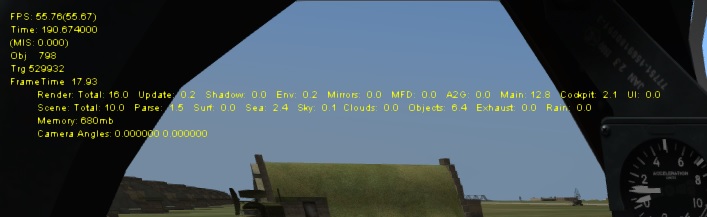
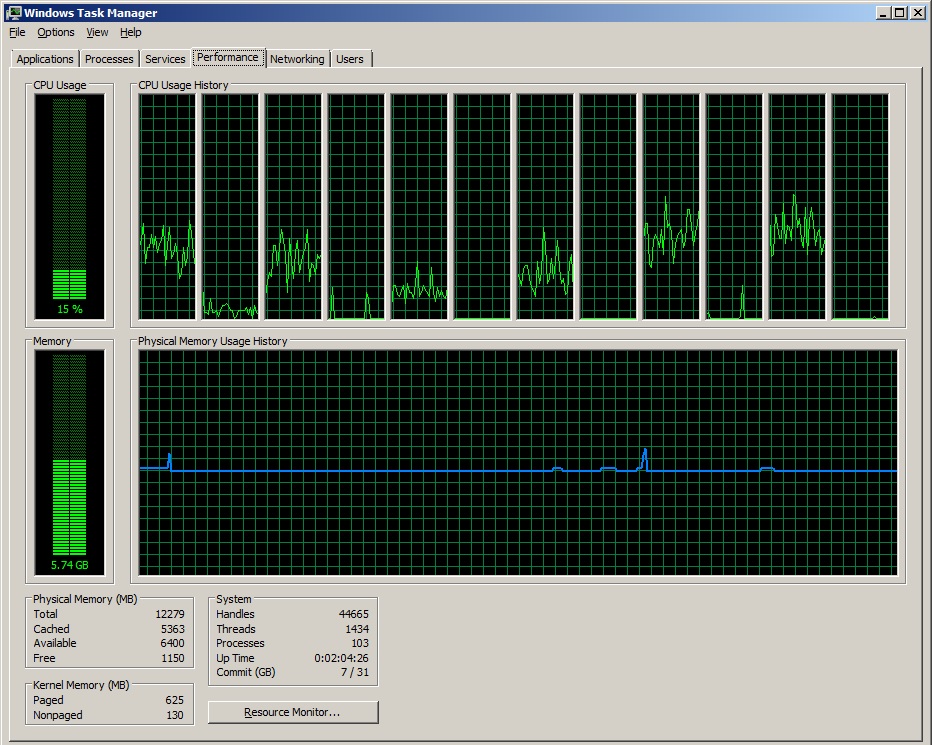
Please, do not think, that I want to be right in any case. But the experience I made during 25 years software development in ATC, cannot be wrong.The big misunderstand for most of the users is the mix up of calculation speed and process time. Multithreading does not give any advantageif it is running on a single core. All threads are serialized and get their process time one after the other if the priority is not changed intentionally.So if 10 threads are running and every thread needs 100 micro seconds before it shifts the control to the next thread, the entire loop would take 1000 micro seconds before thefirst thread gets control again.If these 10 threads are spread over 2 cores, the loop time would be the half theoretically.There is a certain limit because the memory access must be synchronized between the cores.If you are dealing with frame calculation it makes a difference if you calculate a position update every 1000micro second or every 500 microseconds. The performance manager may still shows below 100% , but the wait for a single thread increases with every new thread in the queue. And no, the thread manager does not take care that all threads get the same process time. Only if a thread needs more than 2 ms process time , then the thread manager interrupts. A good constructed thread pushes the control back to the thread manager, immediately after one calculation loop. To simplify this point of view. Two active cashiers in a supermarket can handle more customer at a time than only one.But the time for the simple procedure, for a single customer with counting items, paying the bill and getting the change, will not be faster.The overall throughput will be better with two cashiers.Since these are only spoken words, and I tend to lie sometimes, I made a test with 6 cores and one with only two cores on the same computer , using the same DCS mission in both tests. Hardware: Processor test 1:Intel i7x980, 6 physical cores at 3.33 GHz Processor test 2:Intel i7x980, 2 physical cores at 3.33 GHz Memory:12.0 GB Graphic:Nvidia Geforce GTX 680 Disk:256 GB PCI SSD Test 1 uses 6 cores the picture below shows the load, during runtime with 6 cores (12 virtual cores) and the resulting DCS frame indication: Now the test with only two cores during DCS runtime: And the resulting frame indication: The frames are decreased from 55 fps to 26 fps. Even, if the average load is far below 100%, a single thread is called less often per second than it would be with 6 cores. And this is the key. My recommendation is still: as much cores as possible
-
http://forums.eagle.ru/showthread.php?t=126899 Post #10
-
buying new pc, how many cores will edge suport ?
towsim replied to LarryElder's topic in PC Hardware and Related Software
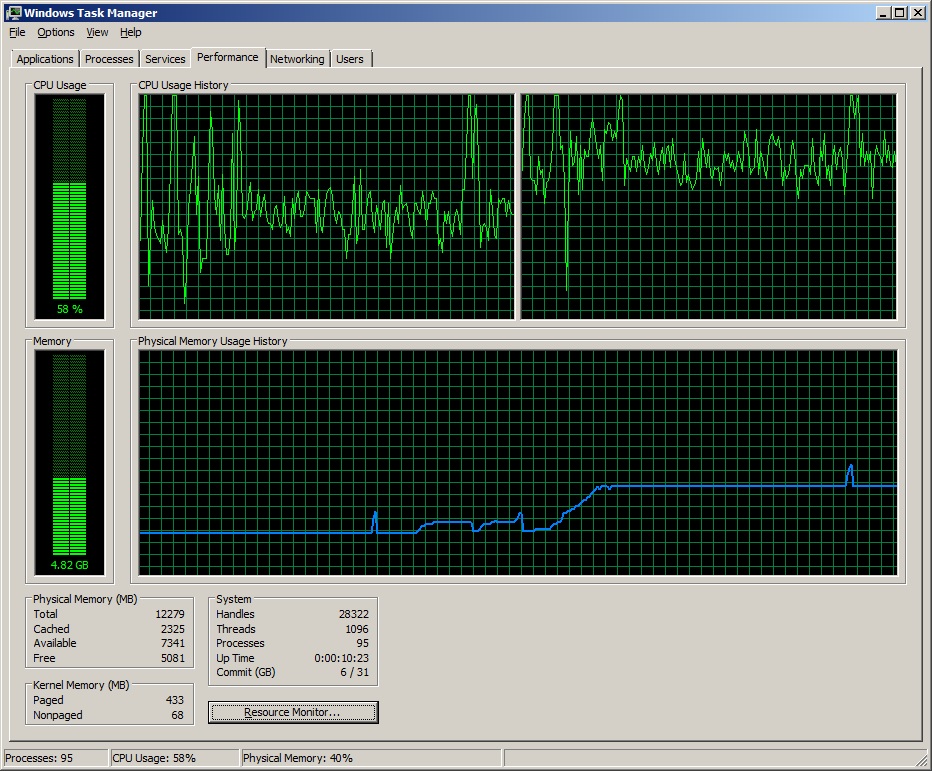
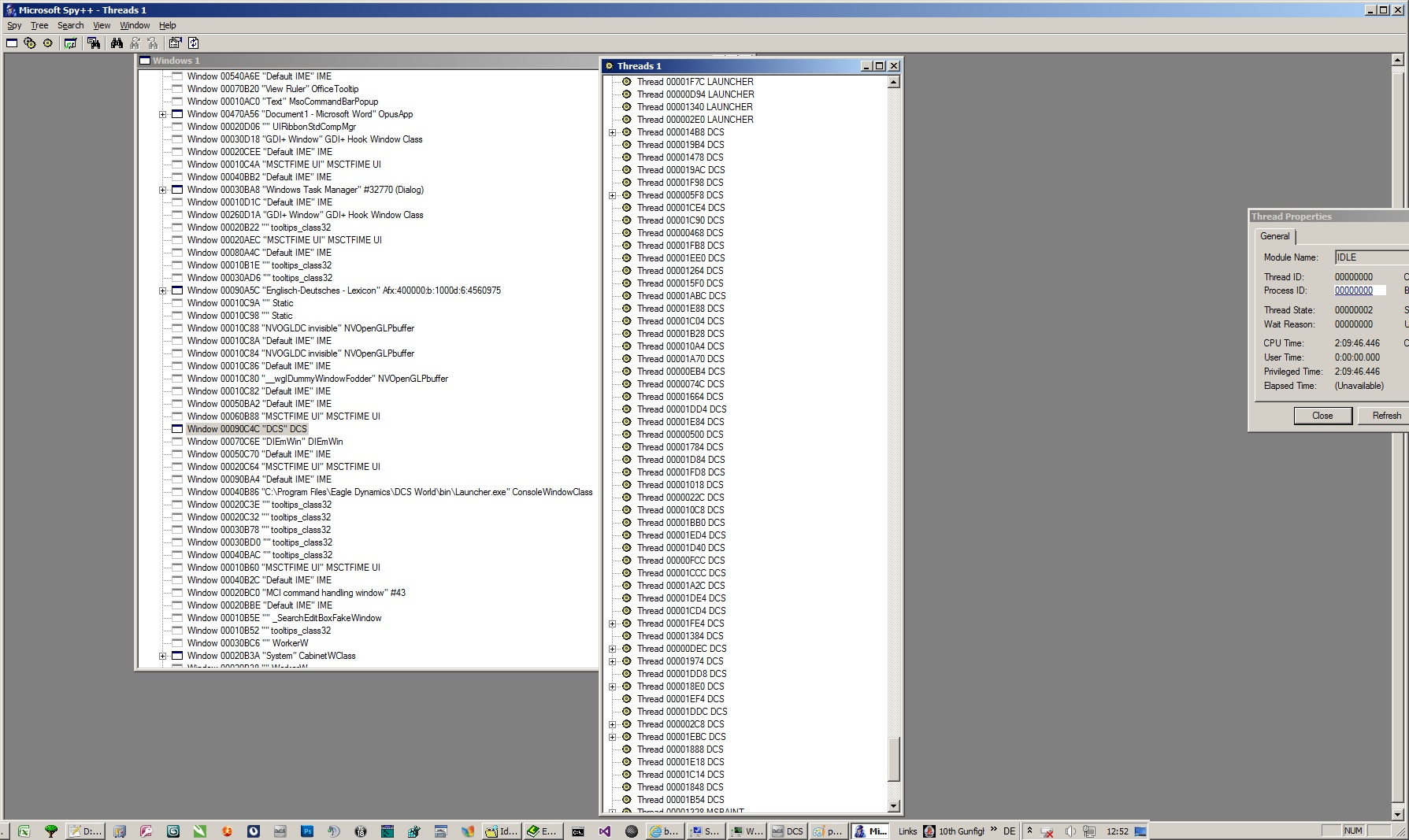
It is a campfire tale, that DSC runs on two threads only. There are some devices like the graphics adapter, which can be feed by only by one and the same thread. As soon as aircraft system simulation is discussed, there are a lot of threads running in parallel. To underline this statement, I attached a screenshot from Microsoft Spy++. The right sub window shows the 54 running threads of a DCS mission. The windows operating system takes care, that all threads are spread evenly over all cores. That does not work perfectly, but it is adequate to take all advantage of multiple cores. The other fact to consider is, DCS is not the only application running on the computer. There are many other processes running in the background, each in an own thread. As you can see in the attached performance diagram picture, 1434 threads are running at the same time. The only reason to think on only two cores is the single core performance. Most of the multi core CPUs have a reduced clock frequency for a single core. In this case, it could become a question to take 4 cores at 2.5 GHz or 2 cores at 3.3 GHz. But this counts only, if you run an important high performance application, which consists of one or two threads only. If you observer the attached performance diagram , showing a running DCS, you will see three cores running at about 50%. These cores carry threads, which can obviously not divided into different processes. But there are other cores, which are significantly engaged. In the diagram you see the result of a 3.3 GHz 6 core CPU running hyper threading, which results in 12 logical cores. The running DCS serves a single A10c in takeoff position at Sochi, RWY 24. Therefore, a six core CPU should have a remarkable advantage over a two core CPU. The 6 cores from the diagram , which carry the most load would be spread over two cores only. The context switch between different cores/threads do not impact the performance like some rumors say. We had a ATC tower simulation driving 256 Aircraft at a time. Every aircraft running in an own thread. It worked on a four core CPU at almost 100% load. And this on a CPU from 10 years ago. So my advice would be, more cores = more performance.
-
If you use the VAD charts from the DOC/Charts folder, you need to know: In the real world there are two main sets of charts. For IFR and for VFR. The VAD charts cover VFR only. ILS, VOR, NDB, TACAN and GPS approaches are subject of the IFR set. Therefore, you find no details for ILS approaches in the VAD charts with the exception of their frequencies. The IFR set does not exist up to now. Since DCS has a mix up of north references , two sets of VAD charts exists. DCS_VAD_Charts_A10C.pdf is especially for the A10c and observes magnetic north. As a result, you will see the published magnetic runway heading from the VAD charts on your HSI, if you are aligned with the runway. The second set ,DCS_VAD_Charts_FC3.pdf, covers the FC3 aircraft which are orientated to another north reference, probably true north. Even here, you will see the published runway heading on the HSI, if you are aligned with the runway in a FC3 aircraft. But do not expect, that true north and magnetic north are that what you find on real world charts. It is anywhat, created by ED.
-
Since we do not have direct access to ED, one of the ED Testers got a short description of the Bug.
-
The only possibility is to poll the external data out of one of the three standard call backs: LuaExportBeforeNextFrame LuaExportAfterNextFrame LuaExportActivityNextEvent Example: LuaExportAfterNextFrame = function() -- poll your data interface for external data (DLL, network...) -- inject the data into DCS like: device:performClickableAction(..... end
-
A couple of month ago I assembled a small document based on the helicopter training course for the US Army at Fort Rucker, Alabama. I tried to include the specifics of the DCS Huey. It even includes the autorotation procedure. If it does not reflect the experience of the DCS Huey specialists, please cremate it. HelicopterBasics.pdf
-
Ok, that makes it more clear. It seem, that the very seldom situation came up, when all path information failed.You should open the file DCS World\AriesWings\AriesConfigurator_log.html with your web browser.In the first line you will see what path information was found. The attached ZIP file contains a modified configurator, which covers this seldom situation. Copy AriesConfigurator.exe to \DCS World\AriesWings and, if the Open Beta is installed, AriesConfiguratorOB.exe to \DCS World OpenBeta\AriesWings. It should solve your problem. AriesConfigurator.zip
-
The location of AriesAirborneRadio.ini is expected as \DCS World\AriesWings\ AriesAirborneRadio.ini. The cofigurator tests three methods to find the path. The first is a path string from the registy: HKEY_LOCAL_MACHINE\SOFTWARE\AriesWings\ DCSWorldPath This path was set during the installation of Aries Radio and comes from the dialog, where the default paths are shown. If this fails, the second possibility is tested from the registry (not that reliable): HKEY_LOCAL_MACHINE\SOFTWARE\Eagle Dynamics\DCS World or HKEY_CURRENT_USER\SOFTWARE\Eagle Dynamics\DCS World Last, the folder where the configurator resides is taken, which is normally \DCS World\AriesWings\. In your case, the method one and two obviously failed. Therefore I would recommend to check the registry entries for HKEY_LOCAL_MACHINE\SOFTWARE\AriesWings\ DCSWorldPath or in case of Open Beta, HKEY_LOCAL_MACHINE\SOFTWARE\AriesWings\ DCSWorldPathOB. If you are save with handling registry entries, you can enter the correct paths there . An example for the Registry path entry: C:\Program Files\Eagle Dynamics\DCS World If the problem remains, please send me an e-mail to support@ariescon.com
-
Can i get telemetry data from DCS??
towsim replied to SnowSmell's topic in Utility/Program Mods for DCS World
Export.lua may contain 5 standardized functions which are used as call backs out of DCS. DCS looks for the existence of export.lua and evaluates the content. If it finds functions with standardized names, they will be called periodically. Out of this functions you can execute your own code. The attachment contains an export.lua, which was published with earlier versions of DCS. It contains a set of functions, which can be called out of the standard callbacks. The most important would be LoGetSelfData(). It returns a pointer to a table, containing all data of the simulated aircraft. But use caution, not all of the functions can be called. A lot of it do not return valid data but simply crash the game. The export.lua was created as example for Flaming Cliffs and was never updated by ED. The standardized functions are: LuaExportStart() Called, when the simulation starts. You can do all your initializations out of this function. LuaExportBeforeNextFrame() Just before DCS creates a new frame this function is called. LuaExportAfterNextFrame() When a frame is finished, this function is called. LuaExportStop() This function is called when the simulator stops. LuaExportActivityNextEvent(t) This function can be used to execute your code asynchronously after a defined time in a loop. A better explanation can be found in the attached export.lua Export.lua