Wad
-
Posts
149 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Wad
-
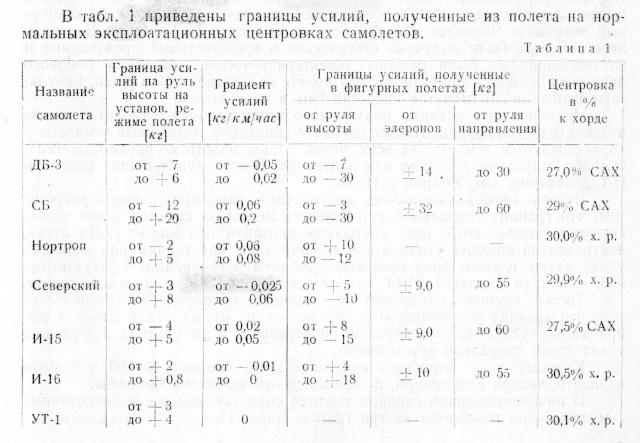
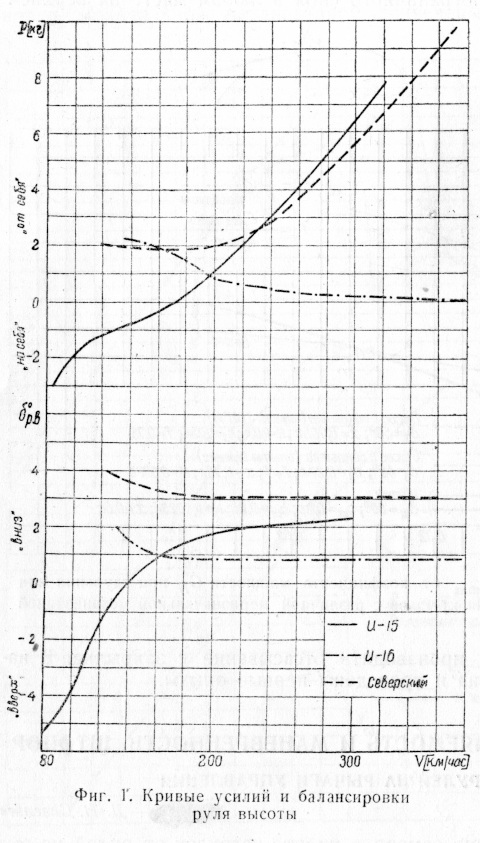
Во-первых, у него сейчас загрузка в принципе не там где нужно. Сейчас на MSFF он слегка висит на ручке. На каком основании? В реальном мире - у него вообще ни на одной фигуре никогда и нигде не было отрицательных ("на себя") усилий (см. вложение)! Это, кстати, благоприятно сказывается в отношении выбирания возможных люфтов не только у реального самолета, но и у джойстика тоже. :) Во-вторых, джойстик, все-таки не настоящая РУС, поэтому есть смысл моделировать с его помощью ощущения, а не загрузку реального самолета, масштабированную в несколько раз. То небольшое усилие, с которым он сейчас тянет вниз мою руку - оно же вообще, можно сказать, фантазийное и больше действует на воображение. Но если мне скажут, что это и есть килограмм на ручке реального самолета - я поверю. Тогда почему бы эту загрузку не перевернуть наоборот - "от себя" и не сделать на посадочной скорости больше в два раза, а на максимальной - в два раза меньше? Ведь на других самолетах ее же можно двигать триммером практически с любой точностью? Нужно будет только еще проверить, чтобы ее хватало на то, чтобы на вводе в фигуры и на посадке тянущих усилий бы не требовалось. На мой взгляд - будет ближе к реальности.

-
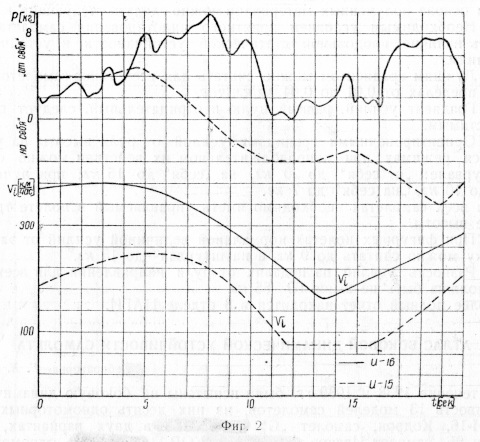
Наиболее интересный график - усилия на ручке на петле. Помимо того, что для выполнения этой фигуры опять-таки ни разу не потребовалось усилие "на себя", здесь очень хорошо видна самая ключевая особенность управления И-16 - его аэродинамическая неустойчивость. Усилие на ручке представляет собой некоторую кривую с непрерывными мелкими отклонениями то в одну, то в другую сторону от медианы - это постоянная борьба пилота с попытками самолета отклониться от заданной траектории. Для сравнения рядом показана ̶п̶е̶ч̶е̶н̶ь̶ ̶з̶д̶о̶р̶о̶в̶о̶г̶о̶ ̶ч̶е̶л̶о̶в̶е̶к̶а̶ характеристика устойчивого самолета (И-15). Надеюсь, окажется полезным.
-
К вопросу о степени достоверности ощущений от управления самолетом И-16 в симуляторе: Пророков нет в отечестве моем, Но и в других отечествах не густо... (с) :) Лично у меня (а я использую MS FFB) после некоторого налета в DCS на И-16 сложилось такое впечатление, что это - обычный самолет, только с очень чутким и легким управлением. Все усилия вполне понятны и предсказуемы - на малой скорости (около 200 км/ч) в горизонтальном полете он весьма незначительно висит на ручке, с ростом скорости это усилие уменьшается и на максимале становится практически нулевым. В вираже ручку нужно совсем чуть-чуть тянуть на себя, на петле - то же самое. Что было в реальном мире: Прежде всего следует отметить довольно интересное протекание балансировочной кривой, прямо противоположное общепринятому: на взлете требуется заметное усилие "от себя", с ростом скорости оно уменьшается (испытания И-16 39-го года со щитками на нормальных эксплуатационных центровках, см. вложение). Таким образом на взлете нет никакого перехода от усилия "от себя" во время поднятия хвоста на разбеге к усилию "на себя" в момент отрыва. В процессе разбега стремление самолета по мере роста скорости опустить нос ниже заданного положения компенсируется незначительным движением ручки на себя, но усилие при этом все равно остается того же знака. Более того, для перехода в режим набора высоты пилот "слегка ослабляет нажим на ручку" (КУЛП-41 стр. 157), т. е. никакого усилия в направлении "на себя" опять-таки не происходит.
-
Надо сказать, что я пока проверял как И-16 в симе по прямоугольному маршруту летает и разные режимы пробовал - сделал более сотни взлетов-посадок. И все равно сейчас раз на раз не приходится и я то в одном месте, то в другом из нормативов вываливаюсь. А уж чтобы все на "отлично" выполнить - это я не знаю, сколько тренироваться нужно. Если бы все это как следует обставить - то только из одного полета по прямоугольному маршруту на И-16 можно было бы увлекательное развлечение сделать! :)
-
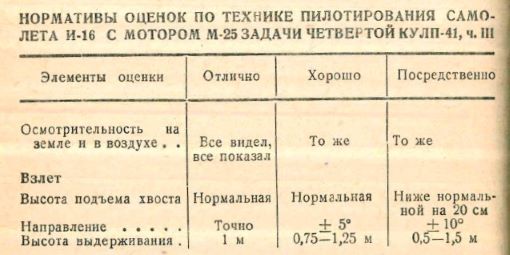
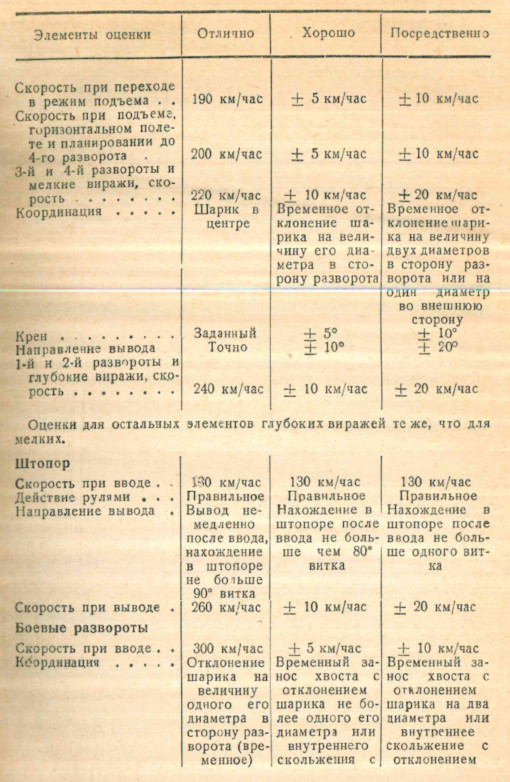
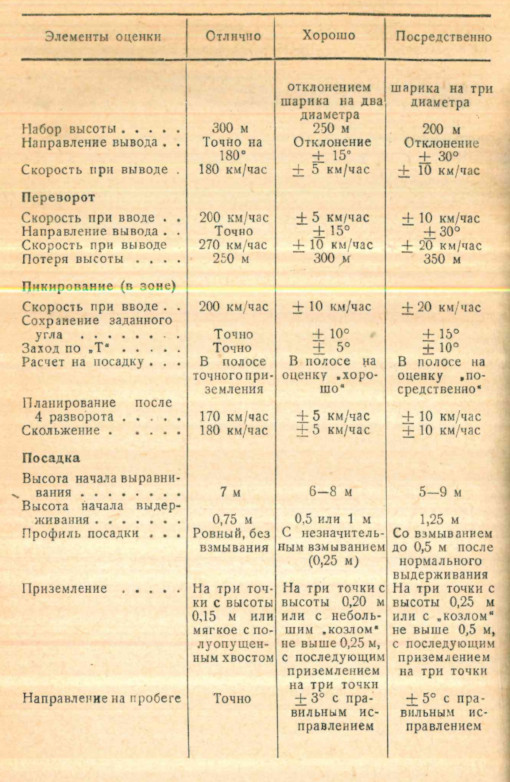
Там все есть, но для И-16 с мотором М-25 и винтом фиксированного шага, поэтому для М-63 и АВ-1 нужно делать поправки. Также не совсем понятно, какой полетный вес И-16 имеется в виду в КУЛПе, потому что по ТО у И-16 с мотором 25 полетный вес 1510,9 и при этом у него нормальная скорость планирования 160 км/ч. В КУЛПе же "нормальное планирование" выполняется на скорости 200 км/ч. Задание:
-
К вопросу о максимальной скорости: вот здесь http://istmat.info/node/58225 выложен Акт 1-го ГУ НКАП СССР "О состоянии самолетостроения и научно-исследовательской работы по I-му и II-му ГУ НКАП на 1-я января 1940-го года": по этому документу максимальная скорость самолета И-16 с мотором М-63 и пулеметами составляет 489 км/ч на второй границе высотности - это в точности соответствует выдержке из отчета по результатам испытаний, которую я показывал выше. В симуляторе, согласно РЛЭ от разработчиков: 462 км/ч.
-
Я пошутил, так про него в "Авиации и космонавтике" писали: "Самолет не был лишен и недостатков. В первую очередь, это относилось к его планирующим качествам с выключенным или отказавшим мотором, оказавшимся примерно такими же, как у бетонной балки. При отказе мотора самолет немедленно опускал нос и переходил в отвесное пикирование из-за своего черезчур тяжелого двигателя. Летчику оставалось лишь как можно быстрее сбросить фонарь и покинуть самолет, если позволяла высота. Именно этим и объясняется очень малое количество вынужденных посадок Фокке-Вульфов- 190. Как правило, такая посадка оканчивалась фатальным разрушением самолета. Позднее, в ходе войны, были разработаны рекомендации летчикам, как сажать FW190 с отказавшим двигателем: если высота позволяет набрать в пикировании эволютивную скорость, рекомендовалось у самой земли плавно выровнять самолет и поставить лопасти винта в положение нулевого шага."
-
Вот я и говорю - в симе сейчас без подтяга самолет не посадить. Такого не может быть вообще даже безо всяких расчетов, потому что тогда с отказавшим мотором летчику остается только за борт сигать с парашютом. Эдак только FW-190 планировал - "как бетонная балка"!
-
В целом так, только, поскольку я изначально не знаю каким будет угол планирования - я для каждой скорости считаю не необходимый cy, а необходимый cr: И, откладывая его на поляре для соответствующей скорости, нахожу сx, сy и угол планирования для данного режима графически: Поскольку вредное сопротивление винта для каждой скорости свое - то и поляры получаются для каждой скорости разные. Я не стал их все рисовать на диаграмме с полярами, показанной выше, потому, что они идут очень тесно, а дал только граничные - для 150 км/ч и для 250 км/ч. Посчитал, какой там получается сдвиг по сх для каждой скорости, и распределил его между этими границами. P. S. Вот здесь, я, конечно, неправильно написал: Делить на площадь винта не нужно - масло масляное получается. Но значимой ошибки не было, потому, что 1,05 это почти 1. В дальнейших расчетах я эквивалентную вредную площадь винта сх*Sвинта делил только на Sкрыла.
-
Задаемся рядом скоростей планирования, для каждой скорости находим обороты, на которых будет прокручиваться мотор. Для каждых оборотов по графику коэффициента отрицательной тяги находим вредное сопротивление винта, строим поляры. Для каждой скорости находим значение коэффициента аэродинамической силы cr, изображаем его на полярах, по засечкам находим сх и су, далее - тривиально. Получается так:
-
Сейчас проверил еще раз поточнее, у модели: скорость 200 у земли, зажигание выключено, дроссель закрыт: 1450 об/мин: мотор работает, дроссель закрыт: 1500 об/мин: Конечно, хорошо бы узнать, как было в реальности - но где ж взять такие данные? На всякий случай предлагаю обороты рассчитать. Для этого достаем из рукава график с производным коэффициентом мощности на режимах отрицательной тяги для винта 3СМВ-2 и подрисовываем там линию, проходящую через установочный угол 17 град. (считаем, что на этих режимах лопасть стоит на упоре малого шага): Затем: -умножаем значения производного коэффициента мощности на относительную поступь в кубе и получаем коэффициент мощности - делим коэффициент мощности на 2 * Pi() и получаем коэффициент момента - умножаем коэффициент момента на квадрат относительной поступи и получаем производный коэффициент момента - делим все значения производного коэффициента момента на 3 и умножаем на 2 для того, чтобы перейти от трехлопастного винта к двухлопастному. - смотрим, что получилось: Теперь находим производный коэффициент фрикционного крутящего момента мотора, для этого смотрим в график: Объем мотора М-63: 29,8 л. Отношение крутящего момента трения к оборотам = 0,015 [Кгм/об/мин] Пересчитываем его в об/сек: 0,015 [Кгм/об/мин] = 0,015 * 60 =0,9 [Кгм/об/сек] Делим полученное значение на плотность, скорость и диаметр винта в четвертой степени и получаем производный коэффициент крутящего момента по оборотам. Для планирования вблизи земли на скорости 200 км/ч его значение будет равно: 0,9 / (0,125 * (200 / 3,6) * 2,7^4) = 0,0024 Производный коэффициент крутящего момента мотора - это производный крутящий момент по оборотам, умноженный на обратную относительную поступь. Строим на графике эту линию, она пройдет через 0 и точку 1 : -0,0024. Пересечение графиков даст нам значение обратной относительной поступи = 1,1: Умножаем полученное значение на отношение скорости к диаметру винта и получаем обороты, с которыми винт будет прокручивать мотор на этом режиме полета: 1,1 * (200 / 3,6) / 2,7 = 22, 63 об/сек = 1358 об/мин
-
У меня получается так: По Пышнову для И-16: К = 11,0 Значит, пренебрегая тормозящим действием винта, для того, чтобы получилось u = 5,7 м/с нужно держать на чистом крыле V = (5,7^2 + (5,7 * 11)^2)^0,5 = 220-230 км/ч. Проверяем - падает вниз со страшной силой: u = 12 м/сек, К = 230 / 3,6 / 12 = 5,3: Смотрим, насколько может быть велико торможение из-за винта. Обороты: 1600 об/мин по прибору, редуктора нет, диаметр винта 2,7 м., на холостом ходу лежит на упоре малого шага = 17 град. Относительная поступь = (230/3,6) / ((1600/60) * 2,7) = 0,89 Смотрим в график ЦАГИ для винта 3СМВ-2: производный коэффициент отрицательной тяги для n*D/V = 1/0,89 = 1,1 и установочного угла 17 град: -0,05: Это для трехлопастного винта, для двухлопастного будет -0,05 / 3 * 2 = -0,033 Тогда сxвинта * Sвинта = 2 * производный коэффициент отрицательной тяги * диаметр винта ^2 = 2 * 0,033 * 2,7^2 = 0,48 Учитывая, что покрытие винта = Sвинта * 4 / (Pi() * D^2) = 2 * bmax / D и ширина лопасти СМВ-2 bmax = 0,092 * D Получаем Sвинта = 1,05 м2, отсюда сxвинта, отнесенный к площади крыла = 0,48 / 1,05 / 14,54 = 0,031 Из поляры И-16 для Кmax: су = 0,7: cx = 0,065 Сдвигаем поляру на 0,031 в сторону увеличения сх и видим, что К ухудшилось c 11 до К = 0,75 / (0,07 + 0,031) = 7,4 Но никак не до 5,3!
-
Вот как раз из-за такой вот посадки у меня и возник вопрос к разработчикам: а почему на вашем Ишаке на посадку нужно обязательно с тягой заходить, словно это реактивный истребитель какой-нибудь? А как на нем тогда садиться если мотор в воздухе откажет? При планировании с выпущенными щитками и полностью убранным газом на скорости 160-170 км/ч вертикальная скорость составляет совершенно недопустимые 12 м/сек, на 180-и - еще больше, на 150-и он уже валиться начинает: Вертикальную скорость на режиме планирования для самолетов тех лет можно легко посчитать по формуле, которую дает Пышнов в своей статье "Вопросы посадки самолета" (ТВФ, № 10-11 за 1940 г.): Сх0 по данным Пышнова из той же статьи для истребителей с выпущенными щитками: 0,05 - 0,06; отношение эффективного размаха к геометрическому для монопланов с низкорасположенным крылом: 0,8. Полетный вес у И-16 с мотором М-63 (по данным из отчета по испытаниям) = 1885 кг. (Кстати говоря, что это за параметр "Масса снаряженная, кг" = 1614 в РЛЭ к модулю? Что в него входит? А полетный вес какой?) Площадь крыла = 14,54 м2 Размах крыла = 9 м. Удлинение: 9^2 / 14,54 = 5,57 Эффективное удлинение: 0,8 * 5,57 = 4,57 Эффективный размах крыла: 9 * 0,8^0,5 = 8,05 Все подставляем (Сх0 берем для верности самый худший = 0,06), считаем: u = 3,1 * (1885 / (8,05)^2)^0,5 * (0,06 / 4,57) ^ 0.25 = 5,67 м/сек. Кроме того, Пышнов и сам уже это все посчитал и привел такие данные: Откуда 12 в симе?