nighthawk2174
-
Posts
1517 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by nighthawk2174
-
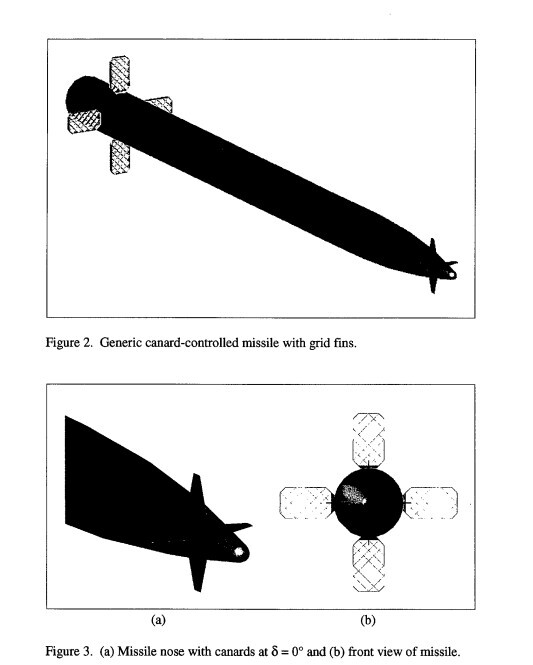
Каковы размеры решетчатых стабилизаторов на P-77?
-
Specific impulse wise HTPB is probably in the range of 242-248. There are patents from the late 90's early 2000's which change up the blend to get it higher but these would not be relevant for the 120B/C. 1498409585215997771-06238499 US6238499B1 - Solid rocket propellant - Google Patents
-
So with it reacquiring why. Does the R27 through its speed gate open if the target is lost? More importantly though chaff should not be impacting a speed gate this bad it should be minimal. Speed gates are often only 10-15kts wide and chaff will fall out of that well before they bloom to an RCS that could be useful. Chaff slows down at 700-1200m/s if memory serves me right and bloom time is 2 or so sec to go to its full RCS. Even near the beam the drop off in speed is such that it should fall out of the speed gate in a fraction of a second.
-
With such methods its best to do a lower and upper estimate which will give you a reasonable range of results. It can be difficult to get exact measurements from photos but depending on how accurate you want to be they can suffice for a reasonable estimate.
-
Do you have the original documents these fin diagrams come from?
-
That'd be good enough considering the limited nature of information.
-
Concerning the motor shape is there a diagram that exists your work is matched too? Do we know the propellant type as well?
-
A few questions regarding the R77 - What are the dimentions of the lattice fins and chord profile? -How much is known about the motor? -How much is known about the radar seeker?
-
I don't think there is a simple method by wich you could calculate it except at very low machs. Shock interactions basically make it so that you need CFD or wind tunnels to do this. You could probably estimate with a drag build up method but it'd have large error margins on it.
-
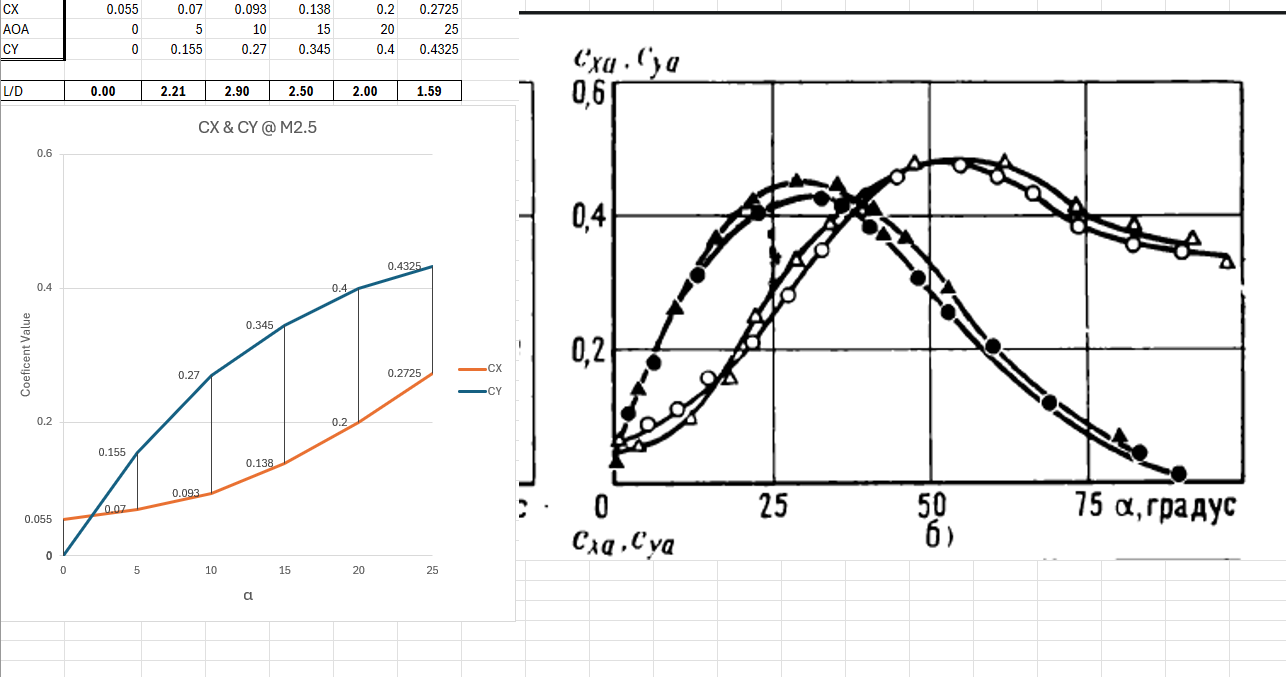
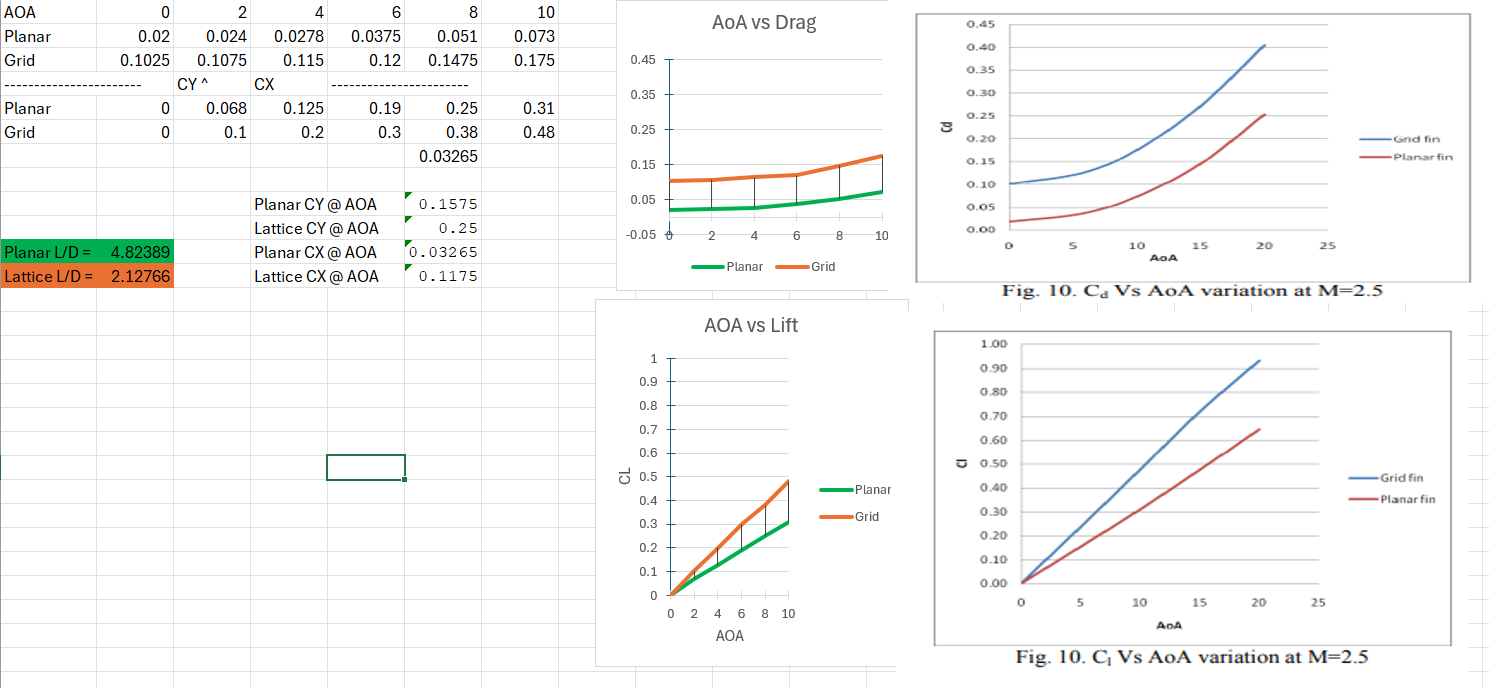
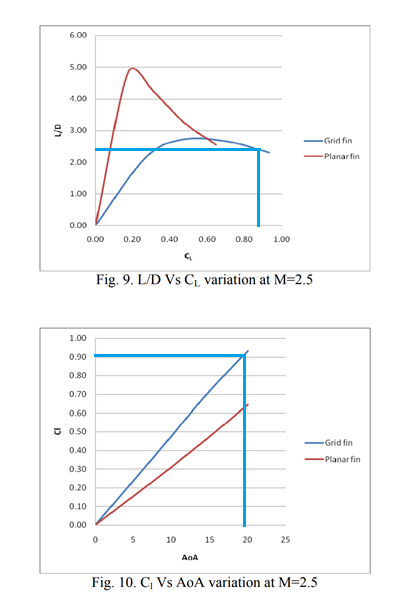
L/D of ~2.4 which is reasonable and the shock angles are reasonable close for M2.5 at 5deg. The original paper I posted was at ~2.15 L/D and Russian document was ~2.2. Also are these body axis force coefficients or wind referenced?
-
https://ntrs.nasa.gov/api/citations/20040110952/downloads/20040110952.pdf A NASA paper I remembered seeing a few years back may be worth a look.
-
The plot has mach number listed with associated plot colors. M2.0 would be a light green to green'ish teal color. While upstream appears to be a light-medium blue instead. If upstream is M2.0 based on the expansion fans angular width i'd expect a much higher post fan mach. M2.5 - M 2.8 depending on how you measure out the fan angular width. But it itself appears to also be awfully close to M2?
-
Is this plot for those condtions you listed?
-
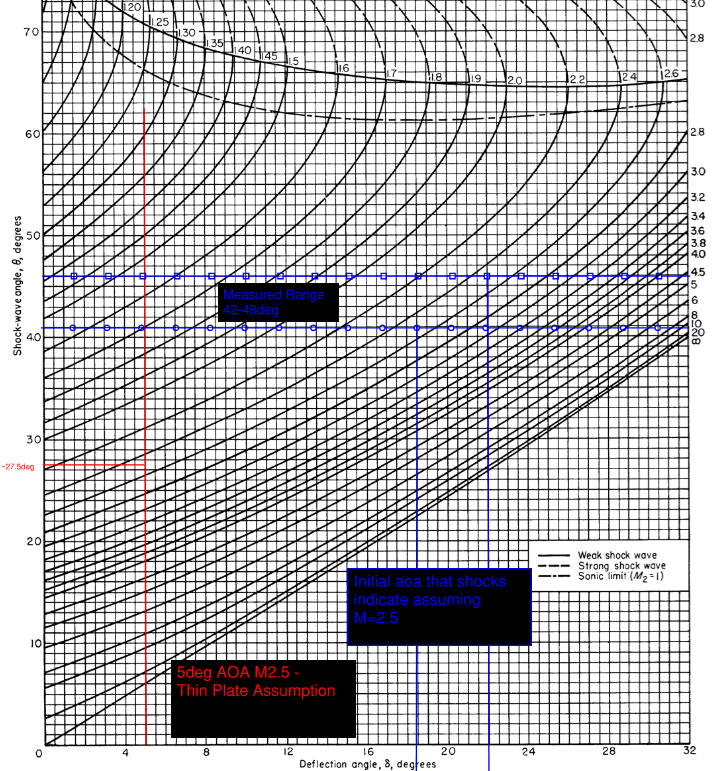
Probably being lost in translation what i'm saying is that the chart you posted lines up with what i'd expect to be the points where you get direct interaction, shock reflections directly off the opposite fin. However this does not preclude the main shocks hitting and reflection off each other (which will still chock flow) while still within a chord length of the tip of the lattice. Shocks off the lattice will nearly follow the oblique shock tables for thin plates. The angle at which the shocks will only interact with each other (as in shock off shock reflection) more then a chord length from the lattice tip can be calculated. This is why flow is still chocked even up to M2.5 not as bad as with all the shock reflections at a lower mach such as M1.5 but it is why the L/D still remains poor except at very high machs 4.0+. Ok
-
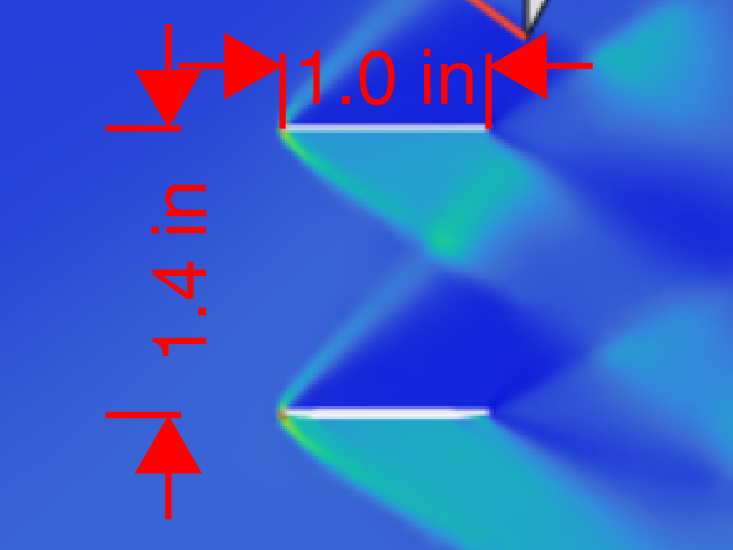
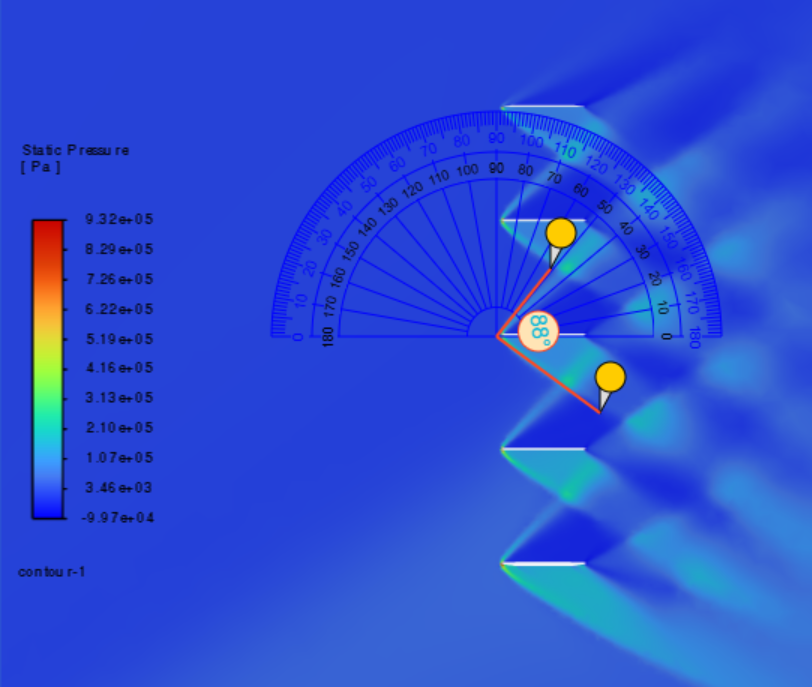
Yes I do the tradeoffs are that by increasing tbar you decrease drag but also decrease lift and dynamic stability. Essentially larger boxes makes it have lower L/D with worse stability, but the sooner you stop getting shock reflections interfering with each other. The chart you posted will be the point where the shock angle is such that you stop getting shock reflections for various tbar's and aoas. The shocks will still interact inside the lattice at least until a much higher mach usally M4+. The pressure coeficent drawings fin outline is making it difficult to tell but the shocks in that example are not interacting with the other plate of the lattice just with the other sock/expansion fan which is to be expected for that mach and angle. null Also from your images tbar appears to be closer to 1.4, scaled such that chord = 1". Doc I linked with the pressure coeficent iso's is ~1.48 inner to inner surface.

-
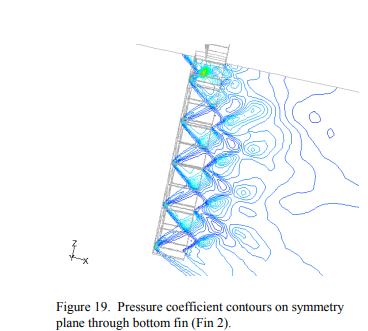
I haven’t made anything up; it is up to you to disprove what I’ve presented. You’ve provided no definitive proof to back the numeric results you listed. Said results don’t align with a substantial amount of wind tunnel and CFD data from NATO, US Army, and academic sources, including your own Russian sources that you posted earlier. I’ve studied lattices at a high level in university and have conducted my own CFD research on them. The numeric results you presented earlier simply don’t align with well-known data points from multiple reputable sources. The static pressure profile you posted matches nearly the pressure profile from the below report which is at M2.5 and 20deg of aoa. The expansion fan on the leward side of the lattice and the shock on the windward side match the above. Indicating to me the CFD results you posted are almost ceratinly from a higher angle of attack then claimed. CFD_analysis_of_grid_fins_for_maneuverin.pdf
-
This data your presenting is not lining up, not even with data you posted earlier. Do you have a screenshot of the numerical readouts or is this just what was told to you? You said that this data was for M2.5 5deg aoa I can't imagine that the fins halfway deflection point is only 5deg. Looking at the shocks if this is at M2.5 the angle the shocks are at would indicate a deflection of closer to 20deg not 5deg. null We also have the CD and CY values you posted earlier for the M2.5 case: null L/D at 5deg is 2.2 and at 20deg is 2. From the original study I posted at 5deg its Cy=0.25 and Cx=0.12 for a L/D of ~2.1. I don't have ref area used in the numbers you posted but assuming that the 2Kn of lift is right - sea level + STP - then drag using the coeficents provided would be 906N of drag not 420|430N.
-
Gotcha did you run the CFD you posted, if so you have the numeric results? Also tbh i'm suspicous of those numbers as that is rather quite high and doesn't line up with the graphs you posted or the wind tunnel results I posted.
-
2D only flow?
-
Roll stability is important in that while manuvering if you are unstable in roll small pertubations can induce roll oscilations which you have to counteract with your control system. You can get long term periodic oscilations which are highly undesirable such as dutch roll if you are lacking roll stability. This can increase miss distances or reduce the efficency of the control system in general. For the army study this would be critical for reducing miss distances of guided muntions like glmrs. For the army document the point was more so to analize performance between nose control canards and tail control lattice fins.
-
Could you define a few of the other variables listed here such as t_bar/H_bar/m/n (where _bar just indicates it has a bar over it) null Yes and in the document I posted, the original one, they get ~2.4-2.5 L/D. The NAO wind tunnel paper with a slightly different gridfin design gets a hair over 3.3 L/D for M4.0 but for the fin only no body.
-
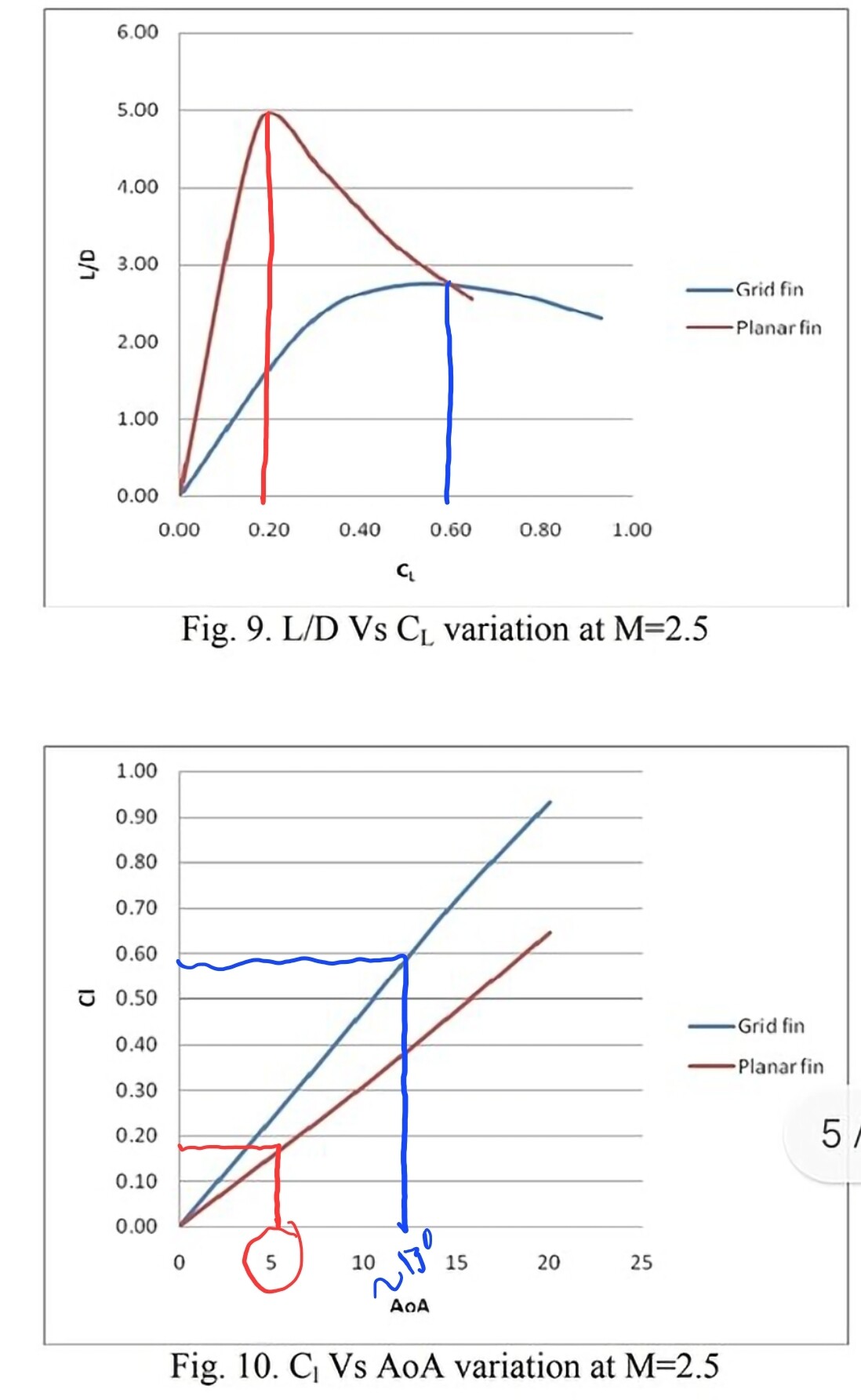
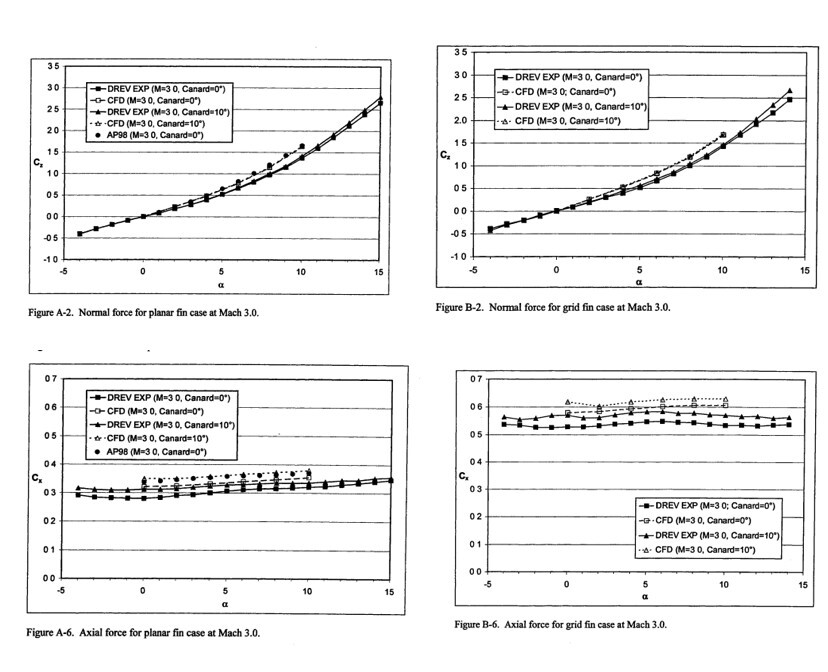
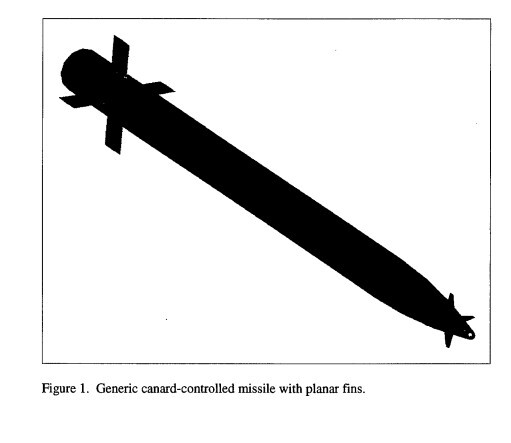
Yeah right, its up to you to prove the supersonic wind tunnel data in the following reports, which align with the one with the charts, are nonsnese. Grid fins experience more drag per unit of lift across most of their range especially at lower angles making the L/D much worse. Yes they produce more lift per unit of aoa, with less hinge moment, but at the cost of substantially more drag across their entire range. Hence why their not everywhere on air-to-air missiles. ADA509444.pdf Numerical Investigation of Aerodynamics of Canard-Controlled Missile Using Planar and Grid Tail Fins. Part 1. Supersonic Flow DTIC ADA426637: Aerodynamic Analysis of Lattice Grid Fins in Transonic Flow : Defense Technical Information Center : Free Download, Borrow, and Streaming : Internet Archive
-
Yes hence my confusion, your description of Kmax doesn't make much sense And as described above for a moderate lifting load aoa difference is a few degrees.
-
Do you have the page which defines this value what you say here is confusing. L/Dmin is a very atypical expression to be used to analyze L/D ratios. As minimum drag will occur at Cd_aoa=0 and even more so if you mean minimum Lift over drag? And per your description this would describe the point where L/D>1.0? I should also note based on the studies i've listed peak L/D efficency for the planar fins occur in the 3-6deg range. While lattice's are much higher often double this.
-
Can you post the definition of Kmakc. Another study to prove my point; data is from the US army supersonic wind tunnel with the reference area being idential between the two fins. Appears to be a study of using GMLRS body as a base with a planar and grid fin design. Study utilized CFD and supersonic wind tunnel testing and data. DREV is data from the wind tunnel. null nullOnce again in this study a suboptimal design was used for the planar fin as it was just a rectangle with a double wedge chord shape. Not to mention it was extremly large. nullNumerical Investigation of Aerodynamics of Canard-Controlled Missile Using Planar and Grid Tail Fins. Part 1. Supersonic Flow