KenobiOrder
-
Posts
186 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by KenobiOrder
-

correct as is Incorrect AIM-7 MK-58 Rocket Motor Model
KenobiOrder replied to Prez's topic in Weapon Bugs
Not even an explanation of why ED thinks it better. Just "correct as is". -
No, the new spotting is aweomse and should stay as is. The best change to DCS by far since the MT patch.
-
Can this please get fixed. Its sort of a big deal. You cannot employ the sparrow at all in cold war servers because if the bandit turns cold or starts cold it instantly loses lock.
-
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
And we have zero verification of any of this. Which means no rational individual can place any significant epistemic confidence in claims originating from a video game module where the justification is "trust me". It makes little sense to hide evidence of details you have already ostensibly revealed through the module. If you have a document that specifically states what you claim, why not even a screenshot and possibly also the name of the source? Surely this would verify your claim without giving away any additional information from your document trove. A competitor would learn nothing new, except that you have valid data. I make no accustion of dishonesty at all. I assume you are giving a good faith module. But it has been the case in the past, more than once, that you justified the current module status based on documents you possessed. Then later, additional, and apparently contradictory information surfaced that allowed for changes. This implies that either some of your sources are not accurate or that you misinterpreted them with the best intentions possible. Or some information was out of date of intended aircraft or system model. This very thread is partially the subject of one example of this. We are now talking about the zero Doppler filter, but entire subject got brought up due to changes to the velocity gate tracking loops and whether the MLC filter was present, which was changed from the original model some time ago based on your research. Also, I am not accusing you of being incompetent either. As I am sure you would agree, the subject of modeling these systems is complex and so is interpreting whatever documentation exists. Mistakes get made, and as far as I can tell you seem to correct them when found. But it would still be nice if you could provide some kind of evidence of various claims. I fail to see how screenshots of specific paragraphs or even document names somehow threaten your exclusive access to a useful information repository when this is data you have already ostensibly revealed and would just be verifying. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
Yeah this is all completely counter factual for the most part. I've done requests for this sort of data and while it can incur costs, most of the time it does not. And to certainly does not involve lawyers. You also making many assumptions about the nature of the source in question with a absolutely zero evidence. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
This makes zero sense when we're talking about government documentation. Nobody is asking for heatblurs proprietary formula or anything. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
Why is this the case? The documents used for this module are either legally available or they are not legally available. How can it be the case that you have legally available documentation that you cannot share, since if the documents could not be shared they could not ostensibly be used for the module either. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
What makes you certain of that? Do you have a document stating explicitly that the PD STT has a 200 knot zero doppler filter and the amount of gain specified? These filters generally work by samling the altidue return and associated side lobe clutter and then placing a threshold on it. However these do not have infinite gain. There would almost certainly be a threshold where the target would be visable. The altitude return itself would be the strongest return. SLC on either side of it would be MUCH weaker and at some point, the AWG-9 should be able to see targets in that region as the target in the main beam and the SLC is not. All HPRF waveforms are not as good as MPRF of course, but its not impossible for them to track low closing rate targets, especially in STT where the Signal to Clutter should be far better than in general search. The point being, at some range the AWG9 should be able to track a target with a low closing rate. Maybe not in the altitude return itself, but that would be far narrower than the 200 knot range currently modeled. No the AWG-9 is not a newer system, but part of the reason I am not convinced by this model is that even older literature or literature writtin about older systems suggests this sort of functionality. For example, I spent some additional time testing the PD STT mode and it does not even have track memory. Even the APG-59 on the Phantom J had track memory in STT (this is according to its manual). So as it stand right now, the AWG-9 is useless even agaist at target that does a 180 turn, even if I slow or increase closure dramatically to try to keep track because the radar cannot hold the target for the few seconds it resides in either the MLC or ZCF. I am just asking you to take a look at your documention again because it very hard to believe the designers of this radar completely blanked the clutter so that the PD STT mode could not even attempt to compete with it. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
Nah I'm saying I have the same data and your selectively picking which setting you want to go with. And in any case, those values are not used in track. In track it's overridden and dynamically adjusted. Tracking loops do not use gargantuan mlc filters. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
Nope. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
I understand what zero Doppler and the altitude return are. But there is no reason for a blanket 200 knot wide filter over it in STT. The altitude return around zero Doppler is significantly weaker than say the mlc, which is unlikely to be overcome at any practical range. However the altitude return is outside the main lobe, and it's strength is further attenuated by it's distance from the aircraft due to altitude as well as the relationship to target range. With the tracking gate centered on the extremely narrow band of Doppler the target is in, only clutter inside the zero Doppler range that precisely corresponds to the tracked target can compete with it. You gain nothing by placing a automatic filter over this region because in many cases the radar will be able to complete with this clutter. The situation in search is entirely different due to the wide variance of ranges, signal strengths, and lack of knowledge where in the Doppler space the target will be. Far narrower than that. And I'm not guessing. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
That is not what I am saying. A am not saying the radar does not need doppler to track. So you have a target with a closer of 700 knots. The ground speed of the radar is 400 knots. By place a tracking gate centered on the targets doppler, you automatically filter out any unwanted returns from unwanted doppler frequencies. Including main lobe clutter/zero doppler etc. I am not arguing that the radar stops tracking doppler. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
It probably should not be present in PD-STT. There is no need for the zero doppler filter in the same manner in which a radar uses this in search. In search this has to be wider because you dont have a target yet and want to avoid random clutter. In STT the tracking gate does this for you. Simply by tracking the doppler of the target, you automatically avoid the ground clutter centered on the radars ground speed. There is no need for a artificial +-100 knot filter. There would still be either gain control to increase the threshold of detection if the target got close to the MLC, or a null that would by dynamically adjusted based on an estimate of the MLC size. Like I said I dont have an explicit source for the tomcat spefically, but I have never heard of a tracking date that would work like that. It would basically defeat the purpose of one of the big advantages of single target tracking. That being that instead of having to place a large filter over a range of velocities centered on the zero doppler, you can now track the target righ up to the actual clutter without losing it. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
No this refers to the tracking gate. When a STT lock is formed, there is no broad MLC filter. The radar forms a doppler gate on either side of the target, only a few knots wide. With phase lock loops, it can be even narrower. The only way the lock will be lost is if the target actually flies into the MLC clutter itself, or into a notch or nuller that is placed over the MLC Clutter. The MLC Clutter width will depend on the azimuth look angle and ground speed of the radar. The closer to the boresight, the narrower the clutter. At close to boresight azimuths, the MLC clutter will be extremly narrow, potentially single digit knots wide. At large look angles with typical beam widths of around 2-3 degrees, your talking 30-60 knots or so. If the target approaches the MLC clutter, it can be avoided by using either some kind of dynamic gain control or a notch placed over the clutter to blank it out entirely. In either case, if the target flies into the MLC, the radar will either hang onto it with track memory so that it finds it again on the other side of the MLC, or potentially even track it through the MLC if the signal is strong enough. What I was seeing earlier to day was that all locks would break around 100 knots of closure or so, even when the target is off the nose. -
Velocity gate in STT appears to be too high
KenobiOrder replied to KenobiOrder's topic in DCS: F-14A & B
I understand the difference between the modes and how they generally work. This issue is regarding the STT velocity gate, not the MLC filter. There is no MLC filter in PD-STT. -
After the update the gave PD-STT a velocity gate, the F-14 was very good at tracking targets near the beam. Perhaps too good, since I could not actually notch it. I reported this issue and @Naquaiisaid he would look at it. However it now seems that the velocity gate of the PD-STT mode is excessively large. When tracking targets, It always breaks lock at 100 knots. This is an extremely wide velocity gate for an STT lock. I do not have a source for the tomcats actual STT velocity gate, but this does seem implausible given both the available literature on tradar tracking gates and other jets in the game. The Mirage 2000 for example, which is also HPRF only, has a gate that is +-25 knots or so. Based on the values given in "Radar Guidance for Tactical Missiles", and Skolnik Radar Handbooik, frequency lock loops range between 500hz and 2000hz. Or a potental range of 14-57knots of doppler. On other words, plausible velocity gates are in the department of +-7 or +-28 knots. Is is possible the MLC filter was accidently reimposed on the STT lock instead of the vel gate? Because 100 knots or so is around the MLC filter IIRC.
-
It should be hard to notch, but not impossible. If you look at the tacviews I posted, the target stays within 7 knots of the beam (or less) for extended periods. What do you mean its operating in both pulse ranging and doppler shift? It is operating at a high prf so range in ambigous. High PRF's tend to have maximum unambiguous ranges of 1nm or MUCH less even. True range to the target can be resolved by PRF switching, but you cannot filter out the ground clutter on the basis of range at high PRF, due to the fact that the clutter is present in every range bin. The main reason it should be hard to notch is due to the narrowness of the velocity gate.
-
That's not how that works. Not having a main lobe clutter filter just means there is no null in the Doppler spectrum where the radar filters out anything appearing there. In tracking radars you have a velocity gate that tracks the targets Doppler, but there is still main lobe clutter that the target can fly into. It's possible that the awg9 would be able to track into the not via the target having significant strength relative to the main beam clutter, but that's practically impossible for a HPRF radar to do when the target is near co-range to the clutter since if the target and mlc are co range, the mlc will invariably be the larger target. This is why I did the tests with the target flying very low, because it would make sense to track through MLC if the difference is range between target and clutter is great enough that target signal exceeds clutter by enough to exceed the gain of any MLC filter or gain control threshold if there is no filter. To put this in perspective, two F-15s with their obviously superior MPRF capable radars we're notched by two foxbats and broke their lock. They were flying very low, near co range to clutter. If an Eagle isn't immune, the AWG-9 sure as hell isnt. Also the velocity gate HB added is not a special tomcat feature. It's basic to pretty much any tracking radar.
-
I dont have a track file presently because the tests I did got corrupted in typical fashion by the DCS track file system, but when I get the chance I will redo them and post them here. It would appear as though PD-STT cannot be notched. I had a friend fly a beam course using a F-15. He was able to maintain about plus or minus 7 knots of the 0 closure, but the radar never lost him, despite staying in the notch for very significant time, far longer than any track memory would be able to maintain. The appears to have been the case since the speed gate was added to PDSTT some time ago, which was obviously a good change but it seems to have introduced this problem. Tacview-20220824-193816-DCS-notch2.zip.acmi Tacview-20220824-192744-DCS-notch2.zip.acmi
-
Some time ago there were some discussion threads about the 54C going active on its own that concluded with Heatblur stating they had a source that confirmed this functionality. Is this still a thing? I have not seen anything in the patch notes and its been quite a while.
-
Yes OP is the info.
-
investigating AIM-120 still can not chase simple Split S manuever.
KenobiOrder replied to opps's topic in Weapon Bugs
No it does not. I am looking at it right now in two separate documents. It specifically states that maintaining datalink has no affect on missile Pk after the missile goes Pitbull UNLESS the missile loses track. -
investigating AIM-120 still can not chase simple Split S manuever.
KenobiOrder replied to opps's topic in Weapon Bugs
That is not correct. The manuals all state the the data link improves Pk in situations where the missile loses track. Reference the HAF-34 for the F-16 for example. -
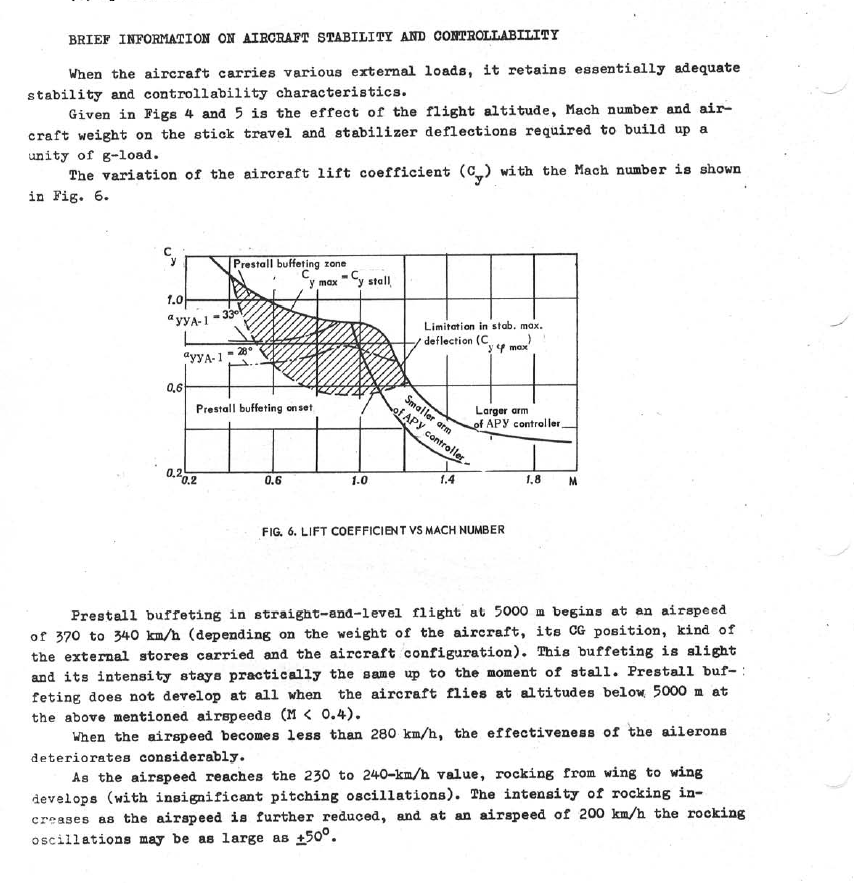
Wing rock is a stall condition. It generally occurs because one wing stalls first, then the other, and then oscillates. In any case the US manual mentions no wing rock whatsoever until you get below something like 250kph, at which point it reports +-50 degree wing rock. The only pre-stall condition reported is buffet, which itself only occurs in certain conditions. As can be clearly see in the stall diagram, on both Russian and American documents, the only warning is for buffet. There is no wing rock warning on the chart, and no mention of it at higher speeds in the expanded description that I could find. What can also be seen in that the 28 and 33 degree limits are NOT the stall limits, unlike in DCS Mig-21. The instructions call the 33 degee limit the stall limit, but thats contradictory to the chart....except at high mach numbers. I sort of get the impression that the 33 degree limit is placarded as a safety limit because the stall AoA appears to decrease substantially with mach number. nullnullnullnullnullnull

-
Yes that's for the airfoil, not the entire wing. If you reference the chart from the U.S manual it shows the actual stall at a much higher aoa than 33 indicated. There is no mention of wing rock except at speeds at 250kph and below, making me wonder if the dcs mig 21 is modeled backwards by accident.