yogi149
-
Posts
376 -
Joined
-
Last visited
4 Followers



Recent Profile Visitors
6216 profile views
![[DE] T-Bone](https://forum.dcs.world/uploads/monthly_2025_08/DSC_07035_Enhanced_NR_feb236537c.thumb.webp.66e5c21e96d8a6489aeb8148209cbfe6.webp)

-
Hi, eigentlich nicht. Das XPlane macht eine eigene Kalibrierung, DCS nimmt aber die vom PC. Also musst du wohl oder Übel die vom Rechner nochmal machen. Entweder mit JOY.CPL über Ausführen, oder z.B. einem externen Tool wie DIView. Persönlich benutze ich lieber DIView, da gibt es nämlich noch ein paar schöne Anpassungen.
-

Cold start not possible after update or changed procedure?
yogi149 replied to Eisprinzessin's topic in Bugs and Problems
Hi, it seems that Batt 1 and Batt 2 are swapped. -
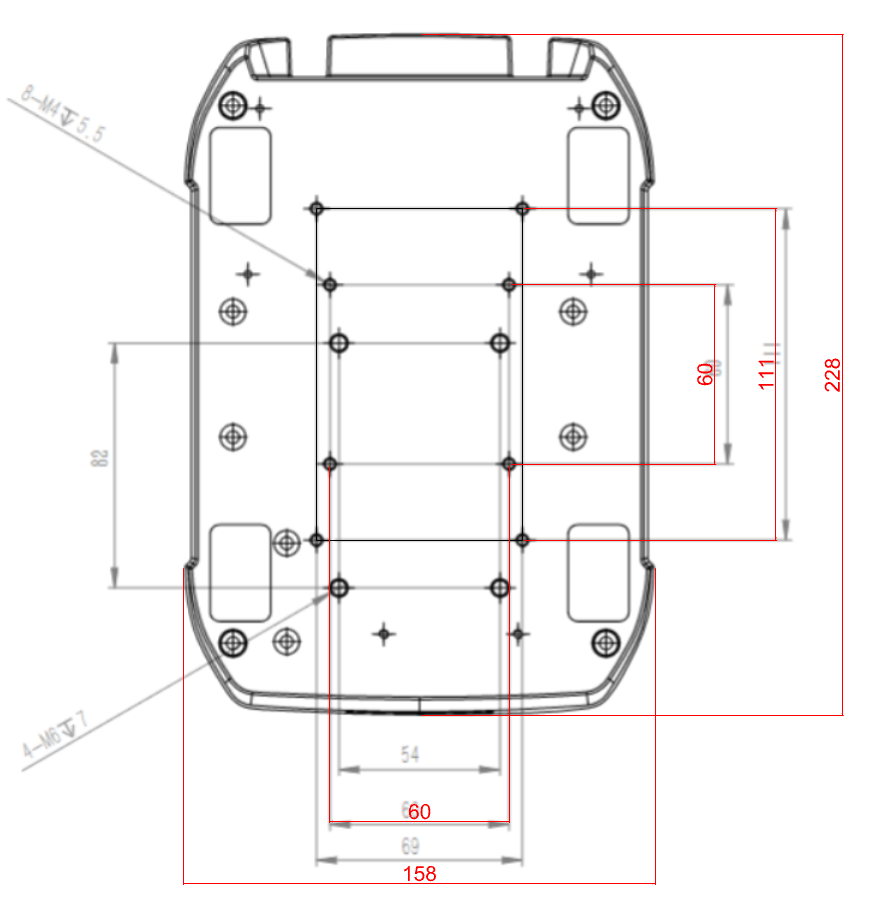
Hi, @rapid Are they really saying that they don't have any dimensions for a product that is already available for pre-order?
-
Hi, with CAD it is easy but rounded to full mm.

-
Hi, ich benute seit Jahren einen Kindle, zuerst einen mit Tasten zum Blättern und mit externer Beleuchtung , aktuell (7 Jahre alt) einen 6" Paperwhite. Mein Frau benutzt ein 10" Android Tablett mit Reader. Zum Konvertieren von Büchern benutze ich Calibre (Freeware): https://calibre-ebook.com/download_windows Damit gehen dann sogar PDF auf dem Kindle, auch Handbücher. So ein e-Ink Reader hat schon eine wesentlich längere Laufzeit als das Tablett.
-
@Sofapiloz Dann müsstest Du für die OH-6 aber auf Mitte lassen. Die hat nämlich keine Hydraulik, folglich also Rückstellkräfte auf Mitte durch die Rotoren. Ein bisschen gekoppelt sind Heckrotor und Pitch durch einen mechanischen Mischer. Und der Collective hat eine Bungee Feder zur Unterstützung der normalen Flugstellung und tatsächlich noch einen Mixer für die Turbine (N2). Zusatz: diese Version hat dann wohl die Trimmactuatoren verbaut (man sollte alles lesen), damit kann man dann einen Feder-Nullpunkt über die Trimmtasten verschieben. Die Feder unterstützt aber nur so, dass man nicht immer die volle Kraft mit der Hand aufbringen muss. @Sofapilozalso genau wie dein Stick, ohne die FTR Taste.
-
Hi @Hiob Danke für den Hinweis, habe es korrigiert. Der Trick bei den BL Motoren ist ja, das die gepulst angesteuert werden, da übernehmen die Kondensatoren im Treiber den "Peak" , das Netzteil liefert quasi nur den durchschnittlichen Strom. Jede Wicklung im Motor bekommt ja nur solange Strom, bis der Magnet passend für die nächste Wicklung steht. Der 57FBL03 hat 8 Magnetpole. (4 Paare) Für die bei FFB nötigen Zwischenstellungen werden dann mehrere Wicklungen bestromt. Irgendwo im Datenblatt von deiner Motor- Treibereinheit könnte eine Ansteuerfrequenz stehen. Mein Test Board mit den TMC4671 Treibern kann den Motor mit zwischen 25 kHz und 100 kHz ansteuern, das OpenFFB Board berechnet mit 1 kHz die nötige Position.
-
die 36 A für 10 Sekunden wären der vom Hersteller erlaubte Wert. Die Leistung ist ganz einfach (ohne Verluste): Spannung [V] * Strom [A], hier also 24 V * 12 A = 288 W ( 188W stehen im Datenblatt vom Hersteller, das würde dann ja nur einen Wirkungsgrad von knapp über 65% ergeben ) Die thermische Begrenzung zeigt aber doch, das der Treiber dann am Limit läuft. Wird, wie ja schon gezeigt, aber zum Fliegen völlig ausreichen. Ist halt eigentlich als Handelsprodukt so nicht machbar. So von wegen Gewährleistung und den anderen (un)nötigen rechtlichen Verpflichtungen.
-
Hi, Peak bei den verwendeten Brushless Motoren ist laut den Herstellern für 10 Sekunden erlaubt. Bei dem im Rhino verbauten Motor sind das statt der nomialen 188 W dann eben knapp 560 W, die aber auch der Treiber bereitstellen müsste. Da hat der am Motor verbaute Treiber definitiv Nachteile. @Sofapiloz zu Deiner Frage: ja, ich werde Dir einen Umbausatz machen.
-
Hi @Hiob THX Da der Motor vermutlich keinen eigenen Temperatursensor hat, wird die Software auch nur die Treiber Temperatur nutzen. Kühlfinnen passen da auch nicht drauf, oder? Und kann man den Lüfter noch etwas optimieren? Wie ist das bei Deinen Pedalen, gibt es da auch Temperatur Probleme?
-
Hi @Hiob kannst Du beim Rhino sehen, was denn da warm wird? Motor oder Treiber?
-
Nein, warum auch. Aber habt ihr euch schon mit Servosystemen in der Robotik beschäftigt? Wie kommt ihr denn darauf, das die Anwendung von Servomotoren so unterschiedlich ist? Und ja, es ist immer ein Servomotor, der von einer Elektronik angesteuert wird. Und zwar nach Rückmeldung mit einem Meßsystem. Bei den Drehachsen mit einem Encoder, bei den Pedalen von Simucube sichtbar mit einer Wägezelle. Die Software entscheidet, was der Motor machen soll. Die Software entscheidet mit welcher Rampe eine Position des Encoders erreicht wird, oder welche Last aufgebracht werden darf, um diese Position zu halten. Die Roboter von KUKA bringen mit 5-6 Achs Systemen Lasten von mehreren 100kg mit einer Genauigkeit < 0,05mm ins Ziel. Das geht nur, wenn die Software ständig die Lasten und Positionen aller Achsen (möglichst) gleichzeitig neu bewertet. Und ja, auch da gibt es dann, programmierbare Dämpfung, Federverhalten und maximal Momente. Und das sind eben immer Servo-Systeme, die selbst im RC-Modellbau vom einfachen "soll-ist" Positionsproblem schon programmierbar in Lastverhalten und anderen Parametern verfügbar sind. Ja, die Software macht euer realistisches Steuerverhalten möglich, aber wie (wiederholt) geschrieben: nur, wenn der Sim das auch liefert. Die Elektronik ist gewissermaßen Strohdumm. Zu den hochfrequenten Vibrationen, die das Real-Gefühl erzeugen: warum soll ich denn auf 3 unabhängige Controls Vibrationen überlagern, die nicht als Reaktion der angesteuerten Steuerelemente vorliegt? Die hochfrequenten Vibrationen kommen vom Triebwerk, den Rädern oder auch von den Rotoren, und übertragen sich doch auf das ganze Fluggerät. Also sollten gut eingestellte Buttkicker und JetSeats das auch übernehmen können, ohne das ich für jedes FFB Gerät das auch noch "einstellen" muss. Bei meinem Gestell reichen z.B. die JetSeat Motore im Sitz aus, die ganz Plattform vibrieren zu lassen, inclusiv meiner Controls. Die Kiowa ohne SimShaker war einfach fürchterlich zu fliegen. Wenn ich mir Videos von echten Helis anschaue (und das sind schon einige): wenn es schüttelt, dann als Reaktion vom Rumpf und alles schön gleich. Wenn wirklich Vibrationen vom Rotor in den Stick zurückkommen, dann landen die meistens möglichst schnell und lassen den Heli zur Reparatur abholen. Das fliegt sonst nämlich auseinander. Und noch ein bisschen über den Tellerand geschaut: Hat aber noch keine Zulassung, weil es den Testfahrern bis jetzt nicht wirklich gefällt. Also hört bitte auf, mir ständig zu sagen, das so ein DD Wheel das Nonplusultra wäre. Das ist nur so gut, wie man es einstellt und die Software Telemetrie liefert. Da ich aber keinerlei Erfahrung mit dem Steuerverhalten von hochmotorisierten Spaßgeräten habe, wäre jegliche Einstellung ein Zufall in der Realitätstreue. Am von @schmiefel gerade nochmal erwähnten Video sieht aber noch was: das ganze sind sehr subjective Einstellungen und werden für jeden Gestellaufbau anders sein. Wer also holt sich dann einen passenden Piloten für jedes Flugmuster auf sein Gestell und läßt sich die Einstellungen erfliegen, die dieser Pilot für realistisch hält? Da ich mit meinen FFB Anbauten mit Huey Piloten kommuniziere, weiß ich aber z.B. das es gut eingestellte Hueys gibt, die kaum vibrieren und welche die ziemlich schütteln. Welches Modell nehme ich denn dann? Mit der FFB Software könnte man natürlich beides simulieren, aber welches von den beiden würde als real empfunden? Ja, FFB wird ein Gewinn sein, aber wieviel Wissenschaft möchte man für den Flugspaß da reinstecken? Schlußendlich muss man selber damit zufrieden sein. (sagt einer, der den Detailgrad seiner Repliken nicht hoch genug schrauben kann. )
-
das ist doch genau der Punkt. Das FFB Gerät muss das umsetzen, was der Sim liefert. Die eigentliche Elektronik muss das an den Motor weitergeben, und da sind die Industrie Anwendungen mit Sicherheit höher ausgelegt. Da geht es nämlich nicht um: hält das ein paar 100 Std, sondern sind genug Schutzmechanismen einprogrammiert, die die Werte von einigen Hunderttausend € schützen. In der Industrie sind einfach andere Anforderungen. (Wir haben in den 1990ern einige Handlingeräte für Spritzgußmaschinen entwickelt, die tunlichst die mehrere Millionen D-Mark teuren Maschinen und das Personal nicht beschädigen) Hast Du Dir das about us von "Granite devices" mal durchgelesen? Entstanden aus einem Hobbyprojekt für eine CNC Fräse und weil er nix passendes gefunden hat, haben sie selber Treiberplatinen für Motoren entwickelt. Aber wie gesagt: wenn der Sim da keine Daten liefert, nützt die beste Hardware nix. Egal ob DIY oder vergoldetes Label. Granites devices / Simucube macht doch alles richtig, sie lassen sich den Namen eindeutig gut bezahlen.
-
Damit man mal sehen kann, wo denn die Servo Motoren in der Größe für DD herkommen: und was die in der Industrie so leisten, ich denke, da ist die Anwendung für ein Lenkrad doch etwas trivialer.
-
also der "kleine" 57FBL03 macht 3000 Upm = 50 Umdrehungen pro Sekunde. Bei meiner aktuellen Variante eines FFB-Blockes habe ich eine 2 stufige Untersetzung mit insgesamt 30:1, und mache damit dann schlappe 36 Nm Drehmoment allerdings nur noch 1,6 Umdrehungen pro Sekunde. Gleichzeitig erhöht sich die Auflösung für die Positionsbestimmung der Achse des Motors auf 61440 impuls pro Umdrehung der Abtriebswelle. Ich persönlich glaube nicht, das man in einem Fluggerät schneller und präziser braucht. Was genau fehlt Dir da jetzt? Das Fanatec das Riemengetriebe nicht hinbekommen hat, heißt doch noch lange nicht, das es nicht geht. Andererseits finde ich das extrem geil, wie beim DD Lenkrad mit extrem viel weniger Teilen soviel Marge generiert werden kann. (Simucube macht ja nicht mal die Mühe ein "formschönes" Gehäuse für die Wheelbase zu designen, die nehmen tatsächlich den nackten Industriemotor und vervielfachen den Preis) Wenn ich das richtig sehe, benutzen Winwing und auch Moza für die Mechanik etwas modifizierte RhinoFB Grundlagen, bei Moza zumindest habe ich in einem Video auch noch Teile der Software gesehen. Warum auch nicht, ist ja Open-Source und Freeware!