Avat
-
Posts
21 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Avat
-
OpenXR Guide - Deprecated - This time for real (▀̿Ĺ̯▀̿ ̿)
Avat replied to nikoel's topic in Virtual Reality
From unplayable jittery low resolution mess straight to smooth, beautiful high resolution experience! It's like magic! Ryzen 5600X, RTX2070, 24GB RAM on G2 Reverb v1. I don't know how to measure FPS in OpenXR, but I suspect it's 45fps with reprojection because during fast head turn I can see black parts on screen (frames not being rendered fast enough) -
What worked for me: 1. HOTAS throttle to minimum 2. Pressed key to go from OFF to IDLE (it makes throttle move in-game, so you know when it worked) 3. Pushing throttle to MAX did not start any engine 4. On the right side of throttle and little forward, there is an ignition override switch for left and right engine. Throttle to MAX and I held ignition for few seconds. Engines started.
-
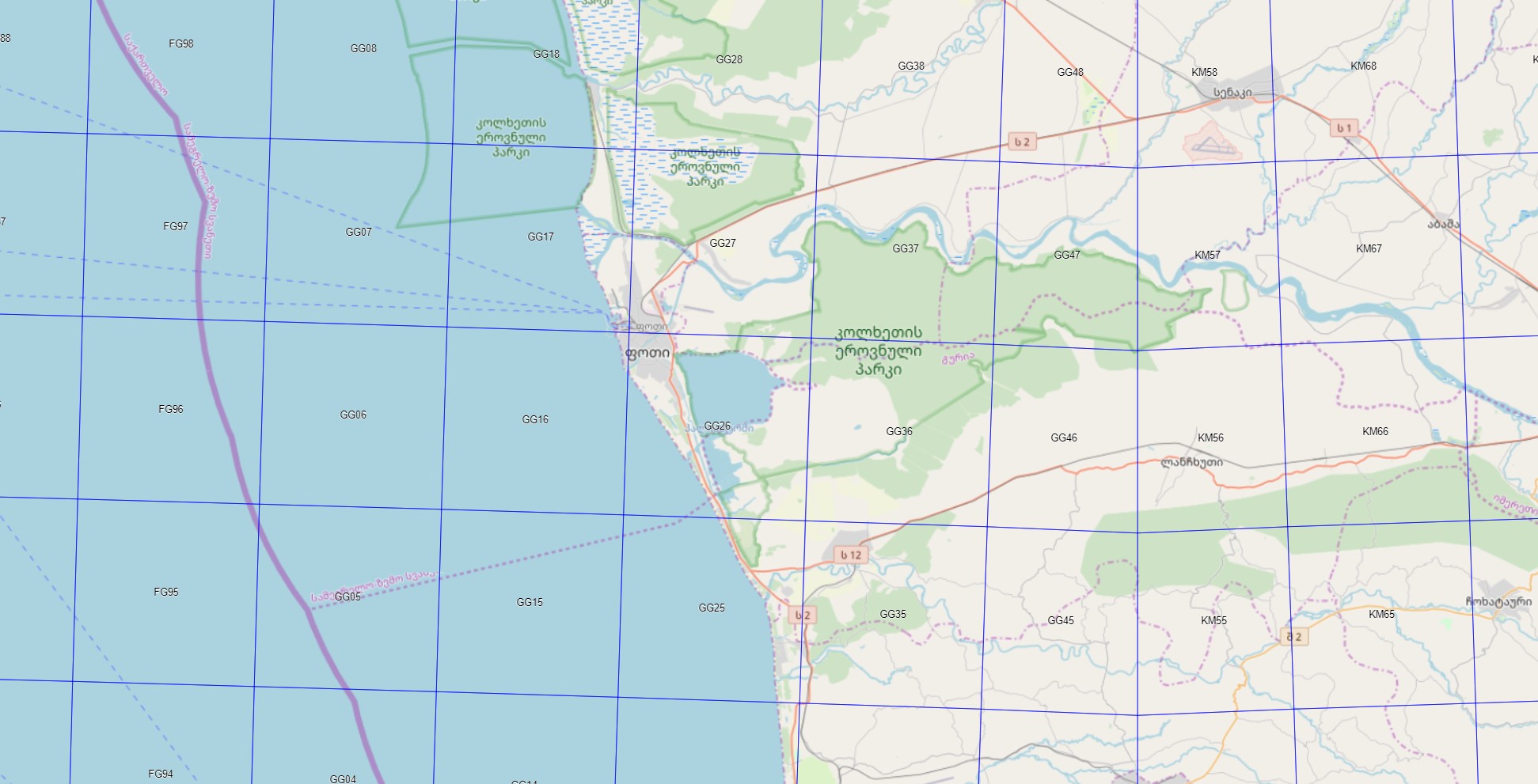
Hey, Not sure if it interests anyone, but I thought I'll just put it here in case anyone searches for this info in the future. I made MGRS grid identical to the one visible on Caucasus map. It covers the whole playable area and grids are named (ex. GG26) You can use it external apps for DCS where you display custom map. Download here: mgrs_grid.zip

-
Thank you everyone. I noticed that first rocket comes from the left wing, so when you bring 12 rockets, first one shoots from the left and you're left with 11 rockets, and that 11th rocket will shoot from the right and so on. Even numbers - left side Uneven numbers - right side
-
Thanks. Is there any indicator which wing will shoot next? On HUD or instrument panel?
-
I'm probably doing something wrong here. Vikhr rockets launch either from the left or right side. Every time I shoot I have to turn Ka50 a little, so Vikhr can get a lock. While turning itself is not that annoying, oftentimes during hover I can't see the target markers on HUD and I have to lower the nose, which destabilises my hover. How to do it properly?
-
My most expensive module by far... feeling bad..
Avat replied to Koriel's topic in DCS: Ka-50 Black Shark
Any news on this? Release date, detailed list of features? -
Is it going to have GUI?
-
Textures by Mustang look blurry on low altitudes. Anything is better than stock when it comes to resolution quality for helicopter flying?
-
Look for DCS Witchcraft on Github - it's got it sorted very well
-
I'm flying with HD Ricardo's Russian version black cockpit, but lots of elements are still very low resolution and quality. Is there any better cockpit when everything is crispy and detailed? English or Russian, doesn't matter.
-
Poor Man's Force Feedback for DCS (Lua based)
Avat replied to Avat's topic in PC Hardware and Related Software
No, the Arduino Joystick will work like normal one, no Lua. Lua would be used only for exporting telemetrics to background app, which would translate it for Arduino (not sure how yet) to move motors. EDIT: Actually, I did some reading on Arduino. Looks like implementing USB HID both way would be difficult or even impossible. That way one could use two Arduinos, as they are pretty cheap - one for Joystick, second for Forcefeedback only, communicating as serial port via USB -
Poor Man's Force Feedback for DCS (Lua based)
Avat replied to Avat's topic in PC Hardware and Related Software
HID is to send joystick movement to game, force feedback would be done separately, but on the same Arduino -
Poor Man's Force Feedback for DCS (Lua based)
Avat replied to Avat's topic in PC Hardware and Related Software
OK, then it seems like all calculations should be made on computer as background app, and force feedback signals sent straight to joystick (ex. Arduino which already has working HID joystick library) with DC motors -
Poor Man's Force Feedback for DCS (Lua based)
Avat replied to Avat's topic in PC Hardware and Related Software
Nice Hakweye60! I feel that RaspberryPi would be easier to use than Mjoy or Arduino, as it's basically a Linux computer. Are there any ready to use libraries which make RaspberryPi a HID USB joystick? -
As currently we have no force feedback widely available to use and I was playing with possibilities of Lua scripting in-game, I did some tests. Lua export function can send up to 100 messages per second, which means information is sent out every 10ms. Export can contain multiple interesting metrics, such as: G-forces Velocity Angles gear speedbrakes refuelingboom airintake noseflap parachute wheelbrakes hook wing canopy controlsurfaces (elevator, aileron, rudder) player fires weapon mach number and many more: https://wiki.hoggitworld.com/view/DCS_export#Ownship So I was thinking - calculating those metrics to apply forces on the stick are way, way easier than working on obscure, troll-patented FF implementations. The code is easy to understand and calculate in whatever programming language you want. Of course well-done, playable FF would still be a long way, but I guess even basic shakes while gear is down, player is taking off/landing or experiences great g-forces would still be great addition for immersion. What do you think?
-
I've got one problem and I can't find out what's the cause. I'm locking targets for Vikhr. Hover is on, all autopilot channels on, ground moving target on and helicopter heading follows the Shkval aim. Suddenly (and I didn't touch anything) Shkval breaks lock and helicopter starts spinning right, goes back for a while to aim at waypoint marked on ABRIS (PVI is turned off, no navigation, no route mode) and goes back to spinning right until crash. When I'm trying to counter it, trim doesn't work. The only way is to disable autopilot heading, stabilize heli and enable it again - then trimming suddenly starts working.
-
OK, I managed to send data to DCS and it's being received properly. But still, the only thing I can send using sockets is string "trigger.action.outText("TEST MESSAGE", 10, 0)" - is there any possibility to make it work in mission?
-
Hello, I have connected to DCS using LuaSocket. I can receive information, but I'd like to send something. So, let's say I want to send UDP message with a command: trigger.action.outText("TEST MESSAGE", 10, 0) Simple command like udp:receive() causes DCS to crash. How to approach this?
-
Open Source Joystick FFB / DIY FFB Joystick
Avat replied to Berniyh's topic in PC Hardware and Related Software
Oops! I've just seen the attachment on previous page! Previous post invalid, then :) -
Open Source Joystick FFB / DIY FFB Joystick
Avat replied to Berniyh's topic in PC Hardware and Related Software
MetalGear_Honk do you have any plans to open source your Force Feedback code? I'd be glad to work on it to transfer the code for Arduino platform, so it can be easily adapted for non-electronics enthusiasts? I still have flashbacks of Atmega programming and dozens of wasted AVRs during beginning of my electronics adventure, and Arduino has huge advantage - it can be plugged and programmed with just an USB cable. I have some designs for rudder pedals and joystick gimbals, but adapting them for force feedback is another chunk of work. As software is about 100x more difficult than hardware, I'd work on it only when having working software prototype. No hardware first - right now I'm stuck with another project's almost 1000 USD hardware and no working software in near future. That's incredibly frustrating and I don't want to repeat this error. Best, Avat