EinsteinEP
-
Posts
490 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by EinsteinEP
-
I posted this elsewhere, but it kinda fits here, too, so... Sorry in advance for what must seem like a dissertation, but this is what I've learned about coaxial rotor flight dynamics. It may help to have a picture or model of the Ka50 in front of you while you read this. In a hover, the two rotor disks of the Ka-50 contra-rotating coaxial rotor helicopter are designed so that they produce the same amount of torque (due to drag) in opposite directions. The lower rotor actually produces less lift/drag than the upper rotor for the same relative airspeed, but since it is working in the higher airspeed downwash of the upper rotor, they match torque production at a hover setting (at sea level on a standard day, <yawn>). This designed so that minimal (ideally NO) yaw input is needed at a hover. During forward flight, this difference in lift production capability results in the upper rotor generating more lift than the lower rotor. The upper rotor rotates clockwise, so you get a net counter-clockwise torque from drag, thus the left yawing tendency at airspeed. This yawing tendency, left uncorrected, will result in uncoordinated flight which is messy and unprofessional. So, in a Kamov contra-rotating coaxial rotor helicopter, like the Ka-50, a Good Pilot, interested in maintaining steady-state coordinated level forward flight, will apply right rudder to counter the left-turning tendency of the upper rotor disk. In a conventional helicopter, applying pressure to a rudder pedal increases (or decreases) the pitch on the blades of the tail rotor, increasing (or decreasing) the lift they generate. The mounting of the tail rotor is such that lift from the blades directly translates to turning moment. So, pressing a pedal directly affects turning moment (aka torque) on the chopper. Unlike conventional helicopters, however, there is no tail rotor on the Ka-50. While removing moving parts from a design is usually a good thing, the function those parts served must be replaced by other parts, or else thrown out of the design. Yaw control is most certainly not an optional "feature" of a combat helicopter and the solution implemented in the Ka-50, while complicated, is quite elegant. In the Ka-50, yaw torque is controlled by varying the pitch of the blades of the two rotor disks. To yaw to the right, the pitch of the blades in the upper rotor disk is decreased which decreases lift which decreases drag which decreases the counter-clockwise (i.e., left-turning) torque it produces. If nothing else was done, the helicopter would yaw to the right due to the excess torque generated by the lower rotor disk, but it would also start sinking due to the loss in total lift. To counteract this, the pitch of the lower rotor blades is increased at the same time, increasing lift which increases drag which increases the clockwise (i.e., right-turning) torque it produces. The total change in lift is zero while the total change in torque is to the right. The process happens in the opposite for yawing to the left. This is all accomplished automatically by the helicopter control systems when the pilot stomps on a rudder pedal. This technique was apparently pioneered by Mr. Kamov, by the way. Unfortunately, that's not the end of the story. Due to a number of factors, including the fact that rotor blades are not infinitely stiff and thus flex a little, rotor blades slope upwards away from the rotor mast when the produce lift. This causes the rotor disk, which is essentially flat while making no lift, to form a cone shape, or rotor cone. In forward flight these cones are asymmetrical, even in single rotor disk helicopters, because of a phenomenon called "dissymmetry of lift". Dissymmetry of lift is caused by the fact that, on a helicopter that is moving, the rotor blades on the side of the disk that is moving in the same direction as the helicopter are moving faster through the air and thus generate more lift than the blades on the other side of the cone. More lift means more force pulling up on the blade, which means a steeper cone angle. Less lift means less force pulling up, which means a shallower cone angle. From the outside it looks like the cone is leaning away from the side of the rotor disk that is headed in the helicopter's direction. This side of the cone is generating more lift than the other (hence the handy-dandy "dissymmetry of lift" moniker) which creates a banking torque on the helicopter. In the Ka-50 contra-rotating coaxial rotor, the upper rotor is producing more lift overall, so although the lower rotor is producing a banking moment in the opposite direction, there is net banking moment to the right. So, in addition to the right rudder needed due to the differing torque production of the two rotor disks at airspeed, left cyclic is also needed to counter the dissymmetry of lift effect. Hence the left stick and right rudder we keep finding ourselves using to maintain straight and level coordinated forward flight. It's natural. And it's right. Now for the Dark Side: One of the cons of this design is that the cones of the two rotor disk system lean in opposite directions. This is because the two rotor disks spin in opposite directions. Although the upper rotor is a bit higher than the lower rotor, at a high enough airspeed, the two cones can cross, which, if you remember from Ghostbusters, is a bad thing: Dr. Egon Spengler: There's something very important I forgot to tell you. Dr. Peter Venkman: What? Dr. Egon Spengler: Don't cross the streams. Or rotor cones. Dr. Peter Venkman: Why? Dr. Egon Spengler: It would be bad. Dr. Peter Venkman: I'm a little fuzzy on the whole "good/bad" thing here. What do you mean, "bad"? Dr. Egon Spengler: Try to imagine all life as you know it stopping instantaneously and every molecule in your body exploding at the speed of light. Or your rotor blades clashing at high speed and breaking off your helicopter, sending you spiraling to the ground! Dr. Ray Stantz: Total protonic reversal! Or rotor clashing! Dr. Peter Venkman: That's bad. Okay. All right, important safety tip. Thanks, Egon. To make things worse, since the lower rotor disk is working in the downwash of the upper rotor disk, its coning angle is more severe than the angle of the upper disk's. In forward flight the top rotor cones a little to the right, and the lower rotor cones severely to the left, bringing the tips of the lower rotor closer and closer to the blades of the upper disk. This is not an unanticipated aspect of the design. Mr. Kamov didn't have a maximum indicated airspeed warning system put in his attack helicopter to keep pilots from getting speeding tickets - he put it there to prevent the pilot from reaching airspeeds that cause intersecting cones. The system doesn't, however, take into account rapid increase of the collective at high airspeed (increased pitch = increased lift = increased coning = see Egon's saftey warning above). Stomping on the right rudder makes the upper rotor disk cone less, but the lower disk cones way more, further reducing the distance between the two cones. Throw in some cyclic controls in just the right direction and voila, rotor blade salad and lots of paperwork! The solution is simple: avoid high airspeeds! If you have to move fast, limit climbing to very gentle rates and avoid strong cyclic or rudder inputs in any direction. If you have a need to climb, pull back on the cyclic first while holding the collective steady. The helicopter will pitch up and start climbing without significantly increasing the rotor coning angles. As airspeed bleeds off slowly introduce collective to maintain your climb rate, but keep the total collective input low until the airspeed bleeds down. There's probably a table somewhere to help real pilots figure out what sort of climb rates they can get at high airspeeds before the rotors clash, but experimentation in DCS: Black Shark suggests you can comfortably climb/maneuver at speeds up to 225 km/hr without coning problems. At 225 km/hr and above, more and more caution is needed with the cyclic, collective, and rudder inputs!
-
[bug]between auto Hover and Fligh director
EinsteinEP replied to Skypat's topic in DCS: Ka-50 Black Shark
Correct in that the real Ka-50 leaves the Autohover light on after toggling the FD on then off, or correct in that DCS:Black Shark really operates this way? -
Actually, regardless of whether the switches are in a "proper" position, is there an .ini or .lua that can be edited to alter the state of cockpit equipment settings at startup? Something more than "helicopter off"/"helicopter started".
-
Totally feel your pain. On the one hand, many organized squadrons out there have "applicant training requirements" or minimum attendance standards, or ego-laden rank structures, or strict flight policies, or some aspect that makes it more like work than fun. On the other, all the whackjobs on the public servers almost make it worth jumping through all the hoops just to get some decent play time. I was extremely lucky to fall in with a great squadron (2GvSAP) that is more of a flying club than a squadron. No ranks, no stats, no policies or procedures, just a lot of good old fashioned shooting each other down. Good luck finding yours!
-
"Fear leads to Anger. Anger leads to hate. Hate leads to suffering." - Yoda. pbsmgm, I haven't tried releasing bombs before, but we'll need more info before we can help you. Alpha's advice is good, post us a track. And include what mission you're on, your loadout, and step by step what you're doing: *EXAMPLE* Training mission umptyfrats.miz with #### loadout... Weapon release button mapped to known key/joystick button? check! Weapon System Power is on? check! K041 is on? check! Altitude above minimum (dunno what minimum is, but 300m is sure to be a safe altitude)? check! Correct hardpoint selected? check! Master ARM is on? check! Cannon is off? check! Holding weapon release button for 1...2...3...4...5... [edit: just loaded up 4 FAB-500s via the Maintenance radio menu, used the LWIN+Home start cheat, took off to an altitude of 200m, clicked Master ARM on and held down the pickle switch for almost 5 seconds before the things went, but they went. I'd suggest waiting a LOT longer and make sure your pickle switch binding isn't letting go after a short period of time.] [edit edit: Did it again, but this time the wait time was maybe a second or two at the max. Must not have been holding down the switch as well as I had thought the first time]
-
Great idea, Blaster, thanks! Did you do this manually, or do you have a tool that automatically makes the Excel file? I'd be interested in a tool that automatically made that kind of list.
-
I have a VERY BIG NEWS about SKINS and MISSION - DcsMax 1.6
EinsteinEP replied to Skypat's topic in DCS: Ka-50 Black Shark
Link broken. -
I believe the OP does realize this and is asking if it is possible to change it so he doesn't have to press some Ctrl/Alt/Shift combination to get the desired view. And he does mean rotor, as in the camera shows a view from the rotor back towards to rudder. zika1234, Haven't tried it myself (at work at the moment) but check the key assigments in the options menu. Use the drop down menu to select the "View" commands and see if it lets you assign your desired keys. Good luck!
-
I second mediafire.com. I have a free account and the only issue I have is explaining to people that they need to look for the "download" button, otherwise it looks like you're on a sign-up page. Great interface, good reliability, great features, especially for a free service! There's a pay-service upgrade, if you're looking to go a little beefier.
-
Multi-Vikhr deplyoment logic
EinsteinEP replied to JaBoG32_Prinzartus's topic in DCS: Ka-50 Black Shark
If your laser lock is marginal once you hold down the weapon release trigger, it may fall below the min required by the time the 2nd Vikhr gets launched. Remember your helicopter will experience a little recoil from the first launch... I had the same problem for a while, but now, when shooting Vikhrs in "long" burst mode, I make sure I'm well stablized before shooting and I haven't experienced that problem since. Good luck! -
Ditto. Great job!
-
Dynamic sound GREATLY added to the immersion of Silent Hunter IV. It caused a pretty signficant but not unreasonable performance hit, though. It is so cool to see a fireball rise up from where your torpedo hit the fat merchie, and get hit with the sound a few seconds or so later. Same with the muzzle flashes and sound of incoming gun fire from bad guy ships. That said, I'm not certain this'd add a whole lot to Black Shark. Would have to try it. Although I applaud the effort (and the efforts of all the fine modders out there), I don't think a static delay for sound effects would cut it for me. I would love to try a dynamic sound ranging mod out though...
-
Why shot Tanks not at Me with 120mm Gun?
EinsteinEP replied to -BENDER-'s topic in DCS: Ka-50 Black Shark
I have been shot down by a tank's main gun, so it *can* happen in the game. Can you post the name of the mission file where you are experiencing this? -
ive searched forum but cant find simple help
EinsteinEP replied to harock's topic in DCS: Ka-50 Black Shark
Try looking in the manual, or the key command list, or searching in the controls section of the program. -
I have the same issue Loyal. As mentioned above, the knob on the right panel adjusts the SCAN rate, but not the rate that the Shkval moves when you hold the up/down/left/right control. The slew rate *is* higher at 7x as opposed to 23x zoom, but it's still pretty slow (especially when you're getting shot at!). One method I tried to improve the Shkval slew rate was to set control axes for the ABSOLUTE Shkval position. This isn't realistic, but it did dramatically increase the speed at which I could slew the Shkval. I felt like I was using Etchasketch controls, thouhg, too awkward and cumbersome to be practical, so now I just live with the slow slew rate. In really hot situations, I'll use the HMS to get the Shkval close and then dial 'er in with the HAT on the cyclic. There are problems with this approach (e.g., targets with high line-of-sight rates), but overall it's been managable. Looking forward to hearing about any other gems that the rest of the community may have found! Good luck!
-
The FD indicates the delta between the current altitude and the AP input altitude, but BTTW-DratsaB's post was asking about the mission-planned altidues.
-
You should read the notes you made during your flight briefing ;). Seriously, though, if the mission designer didn't state flight altitudes in the mission description, you can manually get it from the ABRIS (the PLAN submodes lists alts for each waypoint as programmed, see manual page 3-40 through 3-41). FYI, this info does not get automatically fed into the autopilot: you'll still have to achieve the desired altitude, set the collective brake, and engage the AP.
-
Dark Light, Try searching the forums: that topic has been discussed quite a bit here (e.g., look at the post just before yours). You can also google "coaxial helicopter yaw" for a few links, if you don't trust forum posts.
-
Smoky, There's a Shkval Uncage/Designate button on the cyclic and a Shkval lock target button on the collective: two different buttons, two different functions. Hopefully this clarification will make those sections of text easier to understand. If not, re-post!
-
Noob question to you, black magic to me...
EinsteinEP replied to Belphe's topic in DCS: Ka-50 Black Shark
sobek, I 100% agree with you. In real flight in the real helicopter, there is a significant banking moment due to dissymmetry of lift, thus my lengthy post earlier. The post above was responding to Acedy's fictional case b) which he posted earlier, which assumed, for discussion, that the two moments were identical. He was claiming that even if the two moments were identical (aka case b), there would still be a banking moment on the helicopter, which I don't believe is true. -
Noob question to you, black magic to me...
EinsteinEP replied to Belphe's topic in DCS: Ka-50 Black Shark

-
Noob question to you, black magic to me...
EinsteinEP replied to Belphe's topic in DCS: Ka-50 Black Shark
Thanks, Acedy. I remember reading this factoid, but didn't understand the source of the banking moment. If the banking moment doesn't come from dissymmetry of lift, where does it come from? -
Noob question to you, black magic to me...
EinsteinEP replied to Belphe's topic in DCS: Ka-50 Black Shark
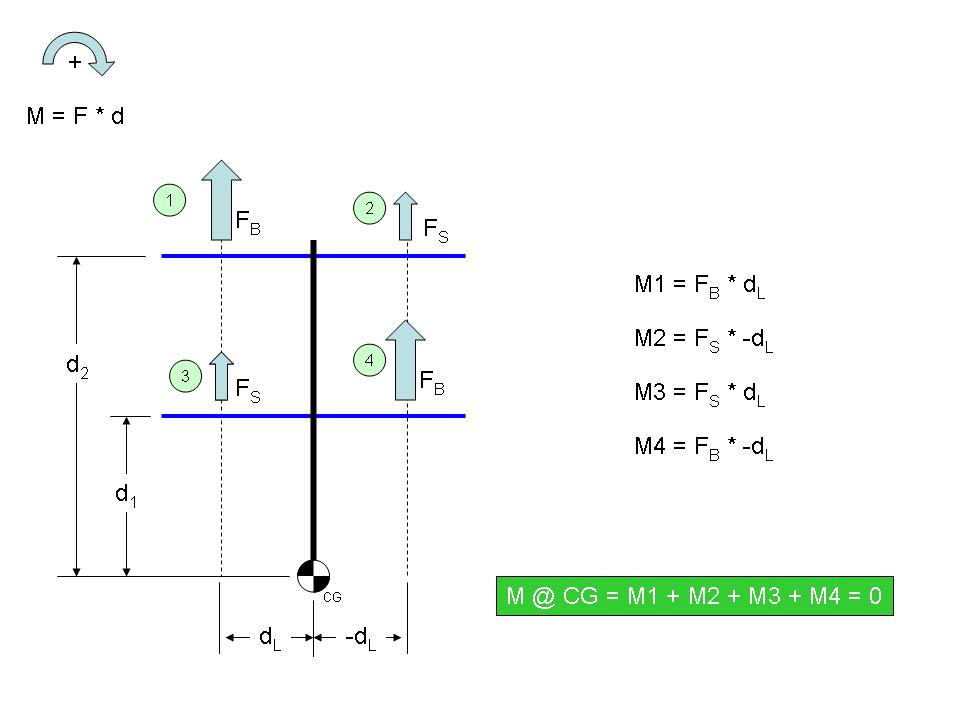
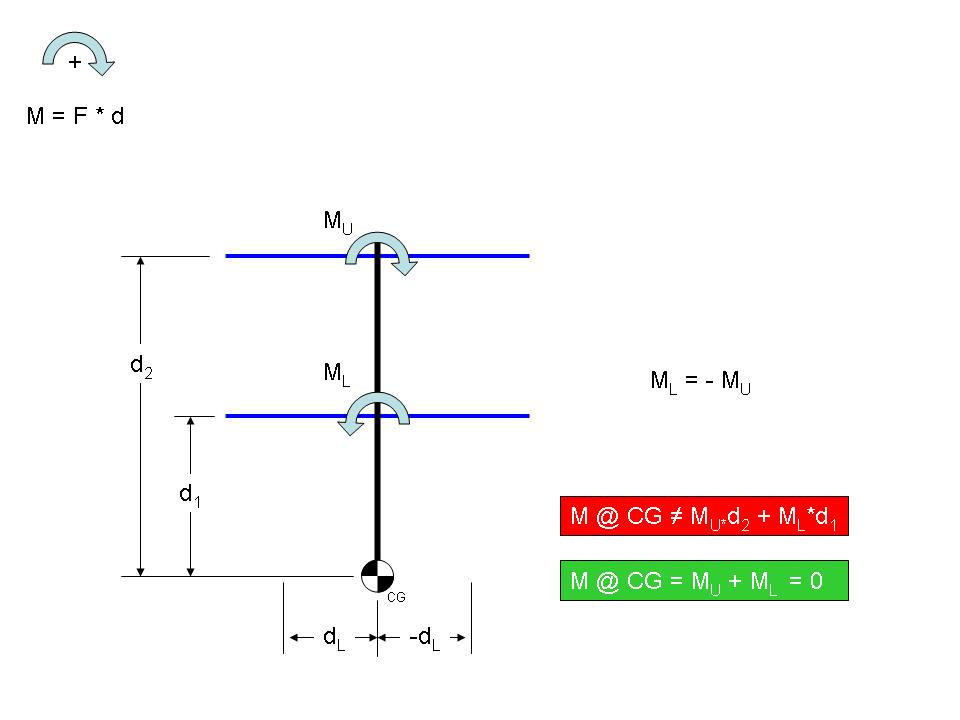
Einstein's Opinion on Contra-Rotating Coaxial Rotor yaw and bank torque characteristi Sorry in advance for what must seem like a dissertation, but here's what I've learned so far. Corrections and/or feedback would be most appreciated: [hint: it may help to have a model or drawing of a helicopter in front of you while reading this] In a hover, the two rotor disks of the Ka50 contra-rotating coaxial rotor helicopter are designed so that they produce the same amount of torque (due to drag) in opposite directions. The lower rotor actually produces less lift/drag than the upper rotor for the same relative airspeed, but since it is working in the higher airspeed downwash of the upper rotor, they match torque production at a hover setting (at sea level on a standard day, <yawn>). This is per design. Whether this is accomplished by differing pitch angles of the blades of each rotor disk, or by using differing airfoils or differing total rotor sizes, I don't know. During forward flight, this difference in lift production capability results in the upper rotor generating more lift than the lower rotor. The upper rotor rotates clockwise, so you get a net counter-clockwise torque from drag, thus the left yawing tendency at airspeed. This yawing tendency, left uncorrected, will result in a uncoordinated flight which is messy and unprofessional so the Good Pilot needs to get the pointed nose where he's going. Which starts us on the path to our shared experiences. In the Ka50, yaw torque is controlled by varying the pitch of the blades of the two rotor disks. To yaw to the right, the pitch of the blades in the upper rotor disk is decreased which decreases lift which decreases drag which decreases the counter-clockwise (i.e., left-turning) torque. If nothing else was done, the helicopter would yaw right (due to the excess torque generated by the lower rotor disk), but it would also start sinking due to the loss in total lift. To counteract this, simultaneously, the pitch of the lower rotor pitch is increased, increasing lift which increases drag which increases the clockwise (i.e., right-turning) torque. Total lift change is zero while total change in torque is to the right. The opposite process happens for yawing to the left. This is all accomplished automatically by the helicopter control systems when you stomp on a rudder pedal. This technique was apparently pioneered by Mr. Kamov, by the way. So, in order to maintain steady-state coordinated level flight in a Kamov contra-rotating coaxial rotor helicopter, like the Ka-50, you need to apply right rudder. Unfortunately, that's not the end of the story. Due to a number of factors, including the fact that rotor blades are not infinitely stiff and thus flex a little, rotor blades slope upwards away from the rotor mast when the produce lift. This causes the rotor disk (which is pretty much flat while producing no lift) to form a cone shape, or rotor cone. In forward flight these cones are assymmetrical, even in single rotor disk helicopters, becuase of the "dissymmetry of lift". Basically, "dissymmetry of lift" is caused by the fact that the rotor blades on the side of the disk that is moving in the same direction as the helicopter are moving faster through the air and thus generate more lift making a steeper cone angle while the blades on the other side of the disk are moving slower through the air making less lift and making a shallower cone angle. From the outside it looks like the cone is leaning away from the side of the rotor that is headed in the helicopter's direction. This side of the cone is generating more lift than the other (hence the handy-dandy "dissymmetry of lift" moniker) which creates a banking torque on the helicopter. In the Ka-50 contra-rotating coaxial rotor, due to the higher lift production of the upper rotor (as mentioned eariler), this results in a net banking moment to the right. So, in addition to the right rudder needed due to the differing torque production of the two rotor disks at airspeed, left cyclic is also needed to maintain steady-state coordinated level flight. Hence the left stick right rudder we keep finding ourselves using. It's natural. And it's right. Now for the Dark Side: One of the cons of this design that we've all been experiencing is that the cones of the two rotor disks lean in opposite directions and, at a high enough airspeed, the two cones can cross, which, if you remember from Ghostbusters, is a bad thing. To make things worse, since the lower rotor disk is working in the downwash of the upper rotor disk, its coning angle is more severe than the angle of the upper disk's! If you look closely enough in forward flight you'll see the top rotor does cone a little towards the right, just not as severe as the lower disk's cone to the left. This is not an unanticipated aspect of the design. Mr. Kamov didn't have a MAX IAS warning system put in the chopper to keep pilots from getting speeding tickets - it's there to prevent intersecting cones. The system doesn't, however, seem to take into account rapid climbs at high speed using the collective (increased pitch = increased lift = increased coning = see Egon's saftey warning above). Stomping on the right rudder makes the upper rotor disk cone less, but the lower disk cones way more, increasing the likely hood of a strike. Throw in some cyclic controls in just the right direction and voila, rotor blade salad! My tip: at high airspeeds, limit climbing to very gentle rates and avoid strong cyclic or rudder inputs in any direction. If you will need to climb, pull back on the cyclic first while holding the collective steady. The helicopter will pitch up and start climbing without increasing the rotor coning angles. As your airpseed bleeds off slowly introduce collective to increase your climb rate. There's probably a table somewhere to help pilots figure out what sort of climb rates they can get at high airspeeds before the rotors clash, but I find I can comfortably climb/maneuver at 200-225 km/hr and save the higher speeds for straight and level cruises. -
Noob question to you, black magic to me...
EinsteinEP replied to Belphe's topic in DCS: Ka-50 Black Shark
I've been noticing this phenomenon, too, but the thing that gets my curiosity is that it doesn't happen to my Ka-50 wingman traveling at the same speed as me. Is full rotor dynamics not modeled for the AI, or do they know some nifty control technique where they can maintain straight and level flight with symmetric upper and lower coaxial rotor coning? -
Murdoc, You should ALWAYS use trim - even if not using the autopilot - unless you can hold the stick and pedals in the desired positions the whole time. Whie this is possible, it's not a good way to fly. As for your sinking while hovering, if the Flight Director is on, the autopilot modes only perform stabilization in the associated axis: they don't control bank, pitch, heading, or altitude, even if you select auto-hover. If your bank, pitch, and heading mode buttons are pressed, but your alt mode isn't, the autopilot will center around the hover point, but won't control altitude. The cheat start macro (LWIN+Home) defaults to the Alt mode being off. Also, the autopilot only has up to 20% control authority. This means if you're collective is down far enough, the autopilot may be giving its full 20%, but could still be not enough to maintain a level altitude. Remember that the amount of collective needed to maintain a level altitude at cruising speed is much less than what you need at hover. To use auto-hover, I recommend you set all 4 autopilot modes (heading control is optional), but make sure F/D is off. Get the chopper into a steady hover using the controls (cyclic, collective, and rudder) first, then trim to that setting, wait a second or so to make sure it's trimmed properly, then engage auto hover. Sounds like a long process, and it is: I don't recommend using auto-hover in combat, unless you're out of range of the bad guy fire. You can also readjust your altitude during hover by a) holding the collective brake button down, b) increasing or decreasing altitude via the collective while still holding the brake, c) stabilizing at the new altitude, d) releasing the brake.