EinsteinEP
-
Posts
490 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by EinsteinEP
-
Thanks for the 411 and links Falcon. As you can see in the posts, what we're discussing (yaw and banking moments generated at airspeed in a coaxial helicopter) isn't explicitly called out in any of those links. We're bashing out our theories against each other and seeing what pieces stick together.
-
So what are your opinions about force feedback controls in Black Shark? Is it immersive? Is it fun? Is it worth it?
-
A third implementation of Trimmer? :D
-
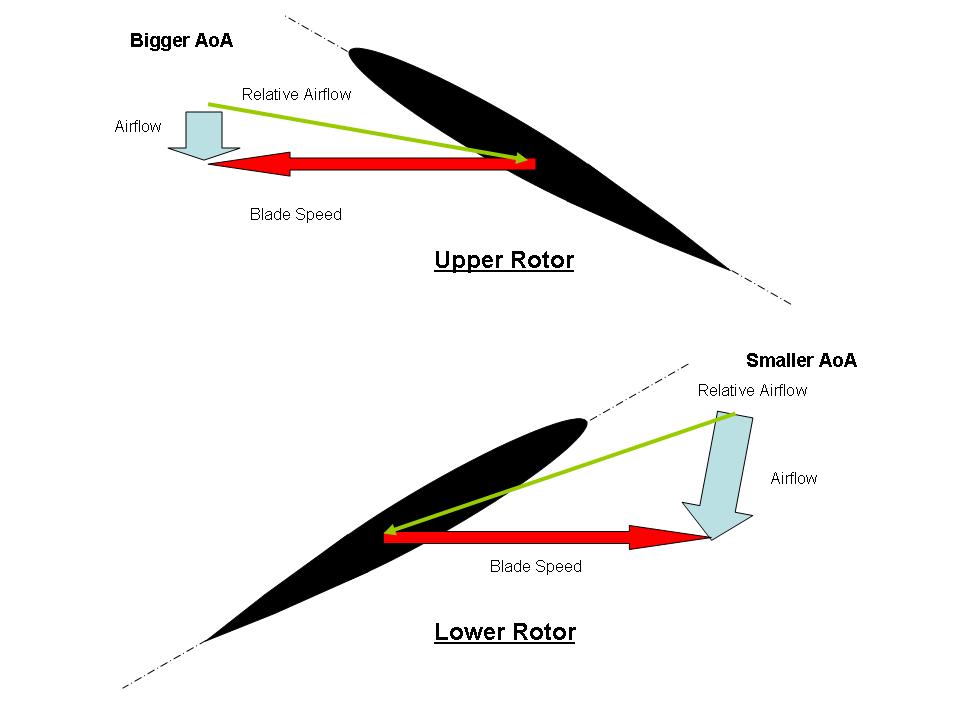
Sorry Obi, somehow I missed your post in all the hub-bub. Thanks for joining in! (It appears that) The helicopter system has been designed so that drag of the upper and lower rotor disks match at a hover, hence the blades of the lower rotor having a pitch of 1.25 deg less than the upper. This is the whole point of the coaxial design, so it's not a far-fetched assumption. As you point out, this wouldn't happen if the two rotor disks were identical. As for how the downwash affects the lower rotor blades' angle of attack, actually the AoA gets REDUCED with the downstream. Airstream coming from above = negative angle of attack. The overall relative airspeed increases, however, which, as you point out, increases parasite drag. Although the pressure of the airstream is affected, I'm not certain to what extent that plays as the effect is usually very localized. In fact as the airstream is sped up by the rotor blades, the static pressure reduces with velocity as the dynamic pressure increases. Will have to mull it over and will keep it in consideration in the future. Thanks for bringing it up!
-
A little cheaper here: http://books.google.com/books?id=nMV-TkaX-9cC&dq=Principles+of+helicopter+aerodynamics&printsec=frontcover&source=bn&hl=en&ei=GFaMSoThJpCEswOpqc2wCQ&sa=X&oi=book_result&ct=result&resnum=7#v=onepage&q=&f=false ;) Sadly, the book focuses on the power efficiencies of the coaxial rotor system, and does not address the yaw or banking moments we are investigating. Something else interesting: have you noticed that, in forward flight, the lower rotor disk cones a great deal more than the upper rotor disk? This observation is what led me to the conclusions I've made, but perhaps I've misinterpreted it. Why do you believe the lower rotor disk cones way more than the upper?
-
To see if I understand: 1.) At the same pitch angle, the rotor blades of the lower disk produce the same thrust as those in the upper rotor, but higher drag. This is due to the downwash and swirl from the upper rotor which increases the relative airspeed to the lower rotor blade, but reduces the angle of attack. An airfoil moving at a higher airspeed with a lower angle of attack can generate the same lift as the same airfoil at a slower airspeed, but the higher airspeed airfoil produces more drag (due to parasite drag effects which are a function of airspeed squared). Did I capture it so far? I hope so, because it makes sense to me. 2). In the Ka-50, the pitch of the lower rotor blades is reduced by a small amount (1.25 deg) to further reduce the angle of attack in the downwash which reduces the lift produced by the lower blades which reduces drag so that the amount of torque generated by the upper and lower rotors matches in a hover. Am I still on track? I'll stop here for feedback. This is fun! On a similar note, but not to sidetrack this awesome discussion, does anybody have an electronic copy of Kamov's "Aerodynamic Features of Coaxial Configuration Helicopter"? All the links I can find to it are dead and I'm hoping it may shed some light on this discussion.

-
Sinelnic, I trimmed the heli for straight and level coordinated flight at 300m alt and 200 kph. I took my feet off the rudder pedals and pulled the cyclic back to pitch to +7 deg. Neither the banking moment nor yaw moment disappeared! (track attached for your review) Although the diagram you drew was correct, the moment caused by F1 and F2 is still in the plane of the rotor mast, no matter how far up or down the helicopter is pitched. This means that the net moment will cause the helicopter to bank, not a yaw. Is there some reason why the theory that the yaw moment is caused by the differing drag of the upper and lower rotors at airspeed is not worth even considering? Some blantant logic error? If so, please feel free to point it out. Seems to explain it pretty nicely...
-
Not sure if this helps, but if you try to engage Auto Hover before the dopper nav system is up*, the autopilot will turn off the bank, pitch, and heading channels (buttons go dark). Now not only is the autopilot not trying to maintain a hover, but you just lost stability augmentation, too! *You can tell if the doppler nav is working by looking for a groundspeed indication in the upper left corner of the HUD.
-
Good point, vrv. Do you think there will eventually be a DCS Black Shark / DCS A-10 forum split, or will the forum traffic for all packages be focused here? I hope for the former as it'll get crowded in here!
-
Welcome to the discussion, sinelnic! The more the merrier! I'm struggling to understand this myself and I really enjoy a decent discussion! Your graphics re: banking (or roll moment) look good, reducing them to forces at the rotor hinge was brilliant. The net "side" forces (in red on your diagram), caused by the dissimilar lift created on each side of the rotor disk due to dissymmetry of lift, seem to describe the condition well, and shows how the banking moment is, indeed, a function of rotor disk height as well as the difference in lift due to dissymmetry of lift. It also explains why the moment increases to the left as airspeed increases. Well done! Your yaw moment theory makes sense as well, as long as you move F1 and F2 back to the rotor mast heads, not the rotor tips! This theory can also be easily tested: Per the theory, the yaw moment is a function of rotor mast angle AND airspeed. If so, if the rotor mast is brought to vertical (+7 deg pitch per Yo-Yo, seems right) while in forward flight (say, 150 kph), the induced yawing moment should immediately go to zero. If it does, you've nailed it and all my work gets flushed down the toilet! ;) Good job! Can't wait to test!
-
http://forums.eagle.ru/showthread.php?t=42880[url=http://forums.eagle.ru/showthread.php?t=42880&highlight=clear+datalink+target][/url]
-
Yo-Yo, I'm sorry, but I'm still not able to follow your explanation nor am I able to see why you think my detailed and researched explanation is wrong. I submit I may have made a mistake and will gladly review any criticism provided against it, I just have a hard time accepting the assertion that "that is not right" without any clear justification. You throw around terms like "banking arms" and "side inclination" as if these are common conventions, but they are relative and ambiguous and can be interpreted to mean a great number of things. A simple diagram (e.g., via MS Paint) will help me understand what you're trying to convey, as it's not clearly obvious. You also have seemed to skip the part that explains how a 12 deg forward pitch of the CG and hubs generate a counter-clockwise yawing moment that's dependent on airspeed. When I first started investigating this behavior, I made a number of free-body diagrams, including at the rotor blade level, the rotor disks, and up to the helicopter system. I poured through a number of aero books, researching helicopter dynamics, including the phenomena of dissymmetry of lift and gyroscopic procession, to arrive at the explanation I provided in an earlier post. Yet I still fail to see yaw moments are a function of rotor height or pitch angle, and not due to differing drag production of the two rotor disks. I like to think I'm not completely stupid (there are many valid reasons to question that, though!). Perhaps you can explain more clearly to enlighten me?
-
Ditto! <sigh> ditto.
-
Hub arms? X-axis? Can you produce a diagram? As I stated in the link a few posts above, the upper and lower rotors produce the same drag in a hover, so no net torque. With forward airspeed, the upper rotor disk produces more drag than the lower rotor disk, and, since the upper disk rotates clockwise, this prodcues a net counter-clockwise moment, hence the need for right rudder. The more airspeed, the more the difference in drag production, the more right rudder needed. If you're referring to the dissymmetry of lift, this effect produces a banking moment, not a yaw moment, which is what the poster's question was about, but even the banking moment is not due to the difference in rotor disk heights, but due to the differing amounts of lift produced by each disk (as the lower disk is working in the upper disk's downwash). The upper disk creates a larger banking moment than the lower disk because it's producing more net lift, not because it's farther from the helicopter's CG.
-
Auto-tracking, in this sense, means that the Shkval is pointing at or "locked on" to a specific target. Since the cannon is fixed to straight-ahead in the procedure you posted, you have to point the pointy end of cannon at the bad guy yourself. When firing any weapon on the Ka-50 you will have to maneuver to some degree. When not fixed, the cannon has a wedge of angles that it can point itself in, so you just have to maneuver the helio so the target is within that wedge. With Vikhrs, the launcher can elevate up and down a handful of degrees, but you still have to point them towards the target. To effectively fire unguided rockets you have to maneuver so that the predictive cue (the circle floating around the bottom half of the HUD) is on your target then POW! Right in the kisser! You can use Shkval to lock on to your target with any of these methods. Use of the Shkval is required to employ the slaved cannon or Vikhrs. You can lock on and track a target with the Shkval while using the cannon in fixed mode or when launching unguided rockets, but these weapons still shoot straight forward and have to be aimed. Hope that helps!
-
Yikes! Talk about not being able to please all the people all the time! ;) There are a number of items that could still be further developed, but I remain extremely pleased with the level of functionality of this sim.
-
How to disconnect rudder from trim?
EinsteinEP replied to RichardG's topic in DCS: Ka-50 Black Shark
Have to recenter cyclic and rudder pedals, not just cyclic. As the OP pointed out, the Trimmer works on both. If you don't center the rudder at the same time as your cyclic, the new Trimmer method will continue to lock out your inputs. Going back to the old method will prevent the Trimmer from "freezing" the controls due to the inputs not being centered, but you may experience control "bump", where the controls will seem to jump in one direction or the other after you trim. If you fail to recenter the rudder pedals, it'll seem like the helicopter is suddenly adding torque all on its own. If you encounter this problem, press rctrl+Enter to view the virtual controls display - look for the difference in where your rudder inputs are (on your rudder pedals or twist stick) compared to what's been trimmed in (on the controls display). For an immediate fix, simply adjust the rudder input until the virtual input is centered then trim. For a long-term fix, practice using the Trimmer with the rudder pedals so that no "extra" inputs are trimmed in. This may take some conscious effort, so have patience and good luck! -
To politely disagree with GG, the torque and banking moments are not caused by rotor height. They're due to the rotor disks producing differing amounts of drag at airspeed (thus torque) and differing amounts of asymmetrical lift (thus bank).
-
http://forums.eagle.ru/showthread.php?p=649872&highlight=ghostbusters#post649872
-
Griffin, not a dumb question at all! I'm still not certain myself, but it appears that 1.0.1a is only an additional fix for those with mixed region installations (Russian game on an English OS, etc.). I have installed 1.0.01, but not 1.0.1a, and still successfully hosted and played an online game with a player who did have 1.0.1a.
-
"No Step"?
-
And auto-turn to target is not necessary to slave Shkval to datalink target point, but helps pointing helo nose at target point (disclaimer: if the Heading autopilot channel is activated, the controls are properly trimmed, and Flight Director is off).
-
Via the forum search function I found the following post for you: http://forums.eagle.ru/showthread.php?t=36902
-
I guess the bad guys CAN see the forest through the trees. Or at least the Hokum.
-
DCS: Black Shark 1.0.1 Update Available
EinsteinEP replied to Wags's topic in DCS: Ka-50 Black Shark
Is 1.0.1a just 1.0.1 without the regional dependency, or is there something else to 1.0.1a?