sydost
-
Posts
140 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by sydost
-
I think the feel provided by artificial feel devices in F-14 control systems could (and should) be simulated with a force feedback stick. It seems that in addition to traditional spring forces there are also increasing stick force per G provided by bob weights and eddy current damper which resists rapid control movements. I didn't quite figure out does the stick change its center position when using pitch trim but it seems to do that when using aileron trim. On lateral feel it has variable control stops which limit stick deflection as a function of airspeed. This could be done using soft stop on FF stick to inform player that the virtual stick has reached limit of travel and further movement of the ff stick doesn't provide anymore control surface deflection. I think it would be awesome if Heatblur eventually simulated all this for force feedback users and sets the bar a bit higher also on this regard. Here are the references I found out: https://books.google.fi/books?id=J-8cAgAAQBAJ&lpg=SA1-PA105&dq=f-14a%20artificial%20feel%20unit&hl=fi&pg=SA1-PA94#v=onepage&q=f-14a%20artificial%20feel%20unit&f=false and https://books.google.fi/books?id=GL5GDwAAQBAJ&lpg=PA265&ots=LrcNJSIe8s&dq=cam%20and%20roller%20feel%20package&hl=fi&pg=PA265#v=onepage&q=cam%20and%20roller%20feel%20package&f=false Unfortunately on the second document the page where F-14 longitudinal feel system is explained is not available for preview.
-
I think that is uncharted territory. The first one on these forums to use the resistor mod actually asked mr Roy (the creator of the original hack) what he thinks about it. Maybe it would be a good idea to ask him if your mod would be pushing the board too hard. How are you thinking about attaching the second motors? I think you'll at least need a beefier power supply than the original. Some added ventilation might be good idea to keep the electronics and motors cooler. Sorry not much help but I'm also interested in upping the force a bit more. More force is always good :thumbup: .
-
Memory buying advice needed (speed and latency)
sydost replied to sydost's topic in PC Hardware and Related Software
Thanks for the answers. Last night I installed my new RAM kit. I bought 32GB Ripjaws V 3200MHz DDR4 CL16. Previous kit was HyperX 2133MHz DDR4 CL14. I did a little bit of benchmarking to get some idea about how this change affects my system. I fired up Epsom campaign's mission 12, took off flew straight ahead couple of miles, turned around and stopped FRAPS measurement when I was back over the airfield. I tried four different setups. 16GB HyperX at 2133MHz, 16GB HyperX at 1500MHz, 32GB Ripjaws at 2133MHz and 32GB Ripjaws at 3200MHz. The average fps's of all the setting were within 1 fps (21.3 - 22.3) so it seems that at least in my very small scale and quick benchmark's the bottleneck was probably something else than memory ;) . Anyway with 32GB at 3200MHz the game might have seemed a little bit smoother and I got slightly higher min and max fps's so maybe it had some minimal effect (or placebo at least). -
Need help on selecting controller for Cougar grip
sydost replied to sydost's topic in PC Hardware and Related Software
Thanks! Yeah I think SiMM8RGe is my choice. I just need to Milan to answer my emails so I could buy one. I'm not sure is the 12-bit requirement really essential in a flight stick. I think 10-bits could do as well. -
Try to reduce strength of some effects within SimShaker for Aviators. I have reduced "Main Rotor Whirl High" to 10 and I think it gives better feel. Too much vibration just masks the effects.
-
Hi! I have Cougar grip on my dual MSFFB2 base. Now I have the original Cougar PCB in use for the grip but I'd like to get rid of the Cougar PCB to have as few PCBs in the stick as possible (and thus USB connections to PC). So I need a controller which has correct shift registers for the Cougar handle to make the transition easy and in addition I'd like it to have at least 12-bit resolution for axes. My previous experience is only with the BU0836A and X but I think those don't understand shift register stuff. Milan from MFG sells the SiMM8RGe board he uses in the pedals and I think that at least could be one viable and easy choice but what are the other choices. Can Teensy or Arduino do the job and how much I need to understand about programming?
-
MS FFB2 hall sensor mod, which sensors and setup?
sydost replied to trigen's topic in PC Hardware and Related Software
Nice mod. I'm wondering would dampers be out of place in a fixed wing stick. I have the same problem as SadistCain with the center area of the stick being too loose. I have been thinking about installing light springs to get better feel at the center. Maybe light dampers would work too. I fly both fixed and rotary wing so I'd like to figure out something that works adequately with both. Which 12-bit controller are you using? -
MS FFB2 hall sensor mod, which sensors and setup?
sydost replied to trigen's topic in PC Hardware and Related Software
Great :thumbup: I haven't tried it myself yet but it was Sadist Cain who told me that it works that way too. Maybe he has some more info how to do it. -
MS FFB2 hall sensor mod, which sensors and setup?
sydost replied to trigen's topic in PC Hardware and Related Software
I see, didn't think about that possibility. There might be some play at the potentiometer attachment to the gimbal as the pot fitting might be a bit loose. I had to fix the pots with tape so that I have the pot center to be the same as stick center and to prevent the pots turning in its fitting hole during use. -
MS FFB2 hall sensor mod, which sensors and setup?
sydost replied to trigen's topic in PC Hardware and Related Software
That is weird. When I did that I didn't get the deadzone with the 12-bit controller and that is why I removed my hall sensor mod as there was no benefits having it. The deadzone is not a built in feature of the potentiometers. You have to have one axis bound to the MSFFB2 to activate FFB in the sim. I have usually used X-axis but recently I heard that you can for example bind the throttle axis to MSFFB2. If you have for example roll bound to MSFFB2 x-axis and your 12-bit controller x-axis it will develop a little bit of jitter to the roll control in game. -
I could lend one of my spare MSFFB2 sticks to HB if they are interested.
-
Memory buying advice needed (speed and latency)
sydost replied to sydost's topic in PC Hardware and Related Software
This. But then again some say that VR likes fast memory. Also many say that for gaming you don't need fast memory but I suspect that is relevant with less demanding games. Maybe someone with more knowledge about these things wants to chime in and enlighten us? -
I am thinking about upgrading my 16GB of HyperX 2133MHz CL14 memory to 32GB and possibly something faster. My computer's other components are I7-6700K, Asus Z170 Pro, GTX1080Ti and I mostly fly in VR. It seems that I could buy 32GB 3200MHz CL16 dual kit for around 300€ or step up to CL15 dual kit for 400€. I find the CL15 kit price a bit steep but I was wondering would it be worth it anyway for DCS. I haven't found any decently priced CL14 kits. My understanding is that the greatest upgrade for my system is the capacity increase to 32GB and that it would be better to have two sticks rather than four sticks of memory. What I don't understand is how much the speed and latency matter for DCS in VR use. Should I just buy the cheapest 32GB kit around and disregard speed or pay a bit more for quality set with good speed and latency?
-
I hope you Smokey won't mind if I loan your thread a bit to ask advice from the gurus. I have been using afterburner for monitoring but it seems that neither my GPU or CPU is maxing out. The most loaded CPU core jumps between 60 - 80% but doesn't go higher than that. GPU is around 70% if I recall correctly but I can max it out if I push the setting further. That was in Epsom campaign's mission 12 where I seem to get around 22 fps at the beginning. I have I7 6700K, Z170 PRO, GTX 1080Ti and 16GB DDR4-2133MHz CL14 RAM. I recently upgraded to the 1080Ti and I am now thinking about picking up more and faster RAM. But how do I know if it's the RAM amount or speed that slows the computer down?
-
Yes he has but not very much. In his book he says that he flew only 2,3 hours with Saab 35CS-model. Then he was dropped out of the Draken training when the budgeted money run out.
-
No problem. Glad to be of some help. :thumbup:
-
Well, yes now that I checked I do also have a jitter of about one step. At first I thought that you were talking about something more significant. My setup was such that I had BU0836A board in my pedals and as there happened to be two vacant axis inputs left I wanted to use those instead of buying a separate board for my stick. So I had quite a long cable via couple of connectors going from stick to pedals and that resulted in bigger jitter of about 10 steps (in 4000) but I found that to still be acceptable. I tested it first with shorter wiring and then the jitter was much smaller but I cannot remember was there any, was it still one step or was it four. But anyway the point of this modification is to get rid of the deadzone which it does very nicely. Yeah you can go with either board. They operate the same and the only difference is the connections. The more expensive BU0836X has push in wire connectors so no soldering needed at the board's end and it has a built in button matrix so no need to make one if you plan to use the button options. If you are only going to use it for the joystick axes I'd buy the cheaper one (BU0836A). It is enough if you just solder an additional wire to come from the pots center leg and attach it to the BU0836's input pin. If I remember correctly I did also connect the ground pin on one of the pots to the BU0836 so that all the circuit boards would be grounded together. So I have only three wires coming from MSFFB2 to Bodnar. As it was difficult to reach the pot I just stripped part of the wire coming from the pot and soldered the additional wire there. And of course remember to cover the stripped wire and soldering with electrical tape at the end.
-
Msffb2 has 1024 steps and 12 bit board like bodnar has 4096 so on paper it is quite a big difference. While flying I doubt that you'll see the difference since 1024 is already plenty for a joystick. About the jitter. I don't think it'll cure it since it probably originates from the pots and not the msffb2 electronics. That is just my wild guess so you might be positively surprised if you just try it and see how it works. I think it is unusual to have jitter in msffb2. I have five units and none of them have jitter. Could it be something your computer does? Easy job to connect the pots if you have done some soldering before. Soldering iron, wire cutters and electrical wire are needed so just basic stuff. About the board. Bodnar has bu0836a or bu0836x which are the ones I have used. Very easy to use. Don't know much about other options but for example Teensy or something similar works. Simply anything your computer sees as a joystick. Oh and forgot to mention that this method of using different input device to the sim than the FFB device works only with DCS to my knowledge.
-
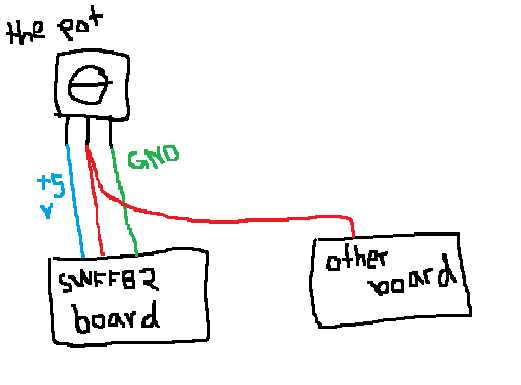
Hi! You cannot replace the msffb2 electronics with bodnar board. Instead you want to keep the msffb2 electronics intact and additionally connect the msffb2 pots to a bodnar (or something similar) board. In the game use the bodnar board for pitch and roll control so the position info for the game comes from bodnar so you'll get better resolution and eliminate the in built deadzone. You'll just have to bind one axis in the game to msffb2 too so that the game sends FFB commands to the msffb2 electronics. Usually I bind the roll axis to msffb2 and put 100% deadzone to it so it won't mess up with the info coming from the bodnar roll channel. I think the resolution in msffb2 is fine already but I did this to get rid of the deadzone especially on pitch axis.
-
Thanks! After a couple of restarts started working.
-
Hi! I tried to update to the latest 2.5.2.17559.377 version. Updater gives me following error: "Can't delete C:\Program Files\Eagle Dynamics\DCS World 2 OpenAlpha\bin/ed_sound.dll: (5) Access is denied." and the update ends. After the update ended I also received following error: "Can't run C:\Program Files\Eagle Dynamics\DCS World 2 OpenAlpha\bin/DCS.exe: (2) The system cannot find the file specified." Any help?
-
A proposal for the usage role and business model of the CE2
sydost replied to MikeMikeJuliet's topic in Christen Eagle II
I think that is mainly because those sims cannot handle the aerodynamics such an aerobatic plane needs for enjoyable and proper experience. On the other hand, handling complex aerodynamics is DCS's bread and butter and that is why the CE2 fits here way better than in those other sims. Also properly modelled CE2 would probably be too difficult to handle for most sim airliner pilots. Anyway, gutsy move M3 :thumbup: -
Lets try a different example. Several times in this rather lengthy thread I have read opinions about that if the atmospheric wind would affect the aircraft during cruise the effects would be so small that the pilot would not be able to notice those in fighter jet speeds. Since all aircraft follow the same rules lets change the fast fighter jet to a sailplane flying at 50kts IAS. Now if we consider that the glider would climb to a higher altitude in a mountain wave (so no unrealistic airstart) and would experience a slowly increasing headwind up to lets say 100kts. Now what would happen when the pilot tries to turn the aircraft to a crosswind or even a tailwind heading if the relative wind would consist of two parts which are the atmospheric wind and the airflow caused by the forward motion of the aircraft? To me it seems that if the proposed theory would be true the pilot couldn't manouver the aircraft at all as the directional stability would be so great that whenever the aircraft would start to turn off the headwind heading it would simply turn back to it. And since we cannot cherry pick this relative wind theory to only work on crosswind what would happen when the pilot turns (if we consider that he is actually able to maneuver the glider) to a straight tailwind in a situation where the wind velocity is greater than aircraft forward speed. That would mean the "relative wind" would actually come from behind and the sailplane would obviously stall since the wings need relative wind from the front to provide lift. In real life a freely flying sailplane would have none of these problems. The pilot would be and is able to continue to fly his machine at 50kts IAS in an airmass which is travelling at 100kts (other words for a 100kts wind) and maneuver the aircraft just the same as he could in an airmass which is stationary (zero wind). How do I know it? Experience. I have flown gliders in winds stronger than the glider's airspeed with no problems. These problems would be more real if the glider was attached to the earth with a long cable like a kite... but it is not. You can think that the aircraft flies in a very big box of calm air and the relative airflow is what happens inside the box. When it is flying in the box of calm air if it happens to have some sideslip angle then the directional stability kicks in and straightens the aircraft back to the relative airflow so all the pictures about the relative airflow hitting the stabilizer were correct. Now if there happens to be wind all the wind does is that it moves the big box of air at the wind speed to the wind direction but to the aircraft inside the box the air in the box is still calm air. The atmospheric wind does not affect the relative airflow. So as you guys can see the proposed theory of relative wind consisting of both the atmospheric wind and the airflow caused by the forward motion of the aircraft creates so absurd problems that it simply cannot be true and that is why Windy and several other pilots say that it doesn't work that way. Also couple of times it has been mentioned that the pilot trims the aircraft so that the wind doesn't have an effect anymore. This really doesn't happen. Aircraft trims are not used to trim off the effects of the atmospheric wind (well.. since there aren't any). Let's again take a glider example. Gliders generally don't have aileron or rudder trims and still the pilot is able to fly the glider on a crosswind heading with ailerons and rudder centered and still have the ball or the string in the middle (which means coordinated or balanced flight). So no need to trim the aircraft any differently when flying in crosswind, headwind or tailwind. It works the same even when having an engine or engines in the aircraft. I hope I made some sense with my examples and didn't stir the pot too much.
-
I haven't noticed any negative effects on my MSFFB2s. I have quite a long cable from the pots to my BU0836A board as the board is on my pedals so the long cable induces about 10 steps of jitter on a 12-bit resolution which I find acceptable until I am willing to buy another board to place it inside my joystick box. If I remember correctly it doesn't do much. There is often a little bit of mechanical play at the MSFFB2 pot attachment so I had to manually align the pots so that the center position matches the stick center and then somehow fix the pots to that position (I used tape).
-
You have a nice airy construction. Where are the springs? I have tried to investigate it earlier but to me it seems it is not adjustable. I think the deadzone might have been adjustable when the joystick had proper drivers (win 2000) but it is not possible with the drivers we have to use. Or then it is hardcoded to the joystick itself? When I have tried to ask others about the deadzone no one hadn't noticed it so maybe some units don't have it or then other people are insensitive to it ;) . There is a workaround for DCS though. I have wired the middle connection from the top SWFFB2 pot to a Bodnar BU0836A board so I get the position info from there without the deadzone. DCS changed a bit a couple of updates ago and now you have to have at least one axis bound to a force feedback device for the force feedback to activate so I have bound my pitch and roll axes to the BU0836A and in addition I have bound the roll axis to my top SWFFB2. That results in small animation glitches on the in cockpit stick but otherwise works. So if you have a Teensy board on your grip then I'd use that. I am not very good with electronics so it might be totally wrong to do it this way but it works for me and I got rid of that irritating deadzone.