Ramsay
-
Posts
3630 -
Joined
-
Last visited
1 Follower
-
Which Version Is Which (And Flyable) For Kneeboards/Skins
Ramsay replied to DragonSoulkin's topic in SA-342M Gazelle
Correct. -
Orientation of Throttle Pinky Countermeasure Program switch
Ramsay replied to Mateo's topic in Controller Questions and Bugs
Both the Real F15E and Razbam DCS manuals say the front CMD pinky switch moves vertically - as you say, the switch animation appears to be forward/aft which is wrong. Tested in DCS 2.9.4.53707 -
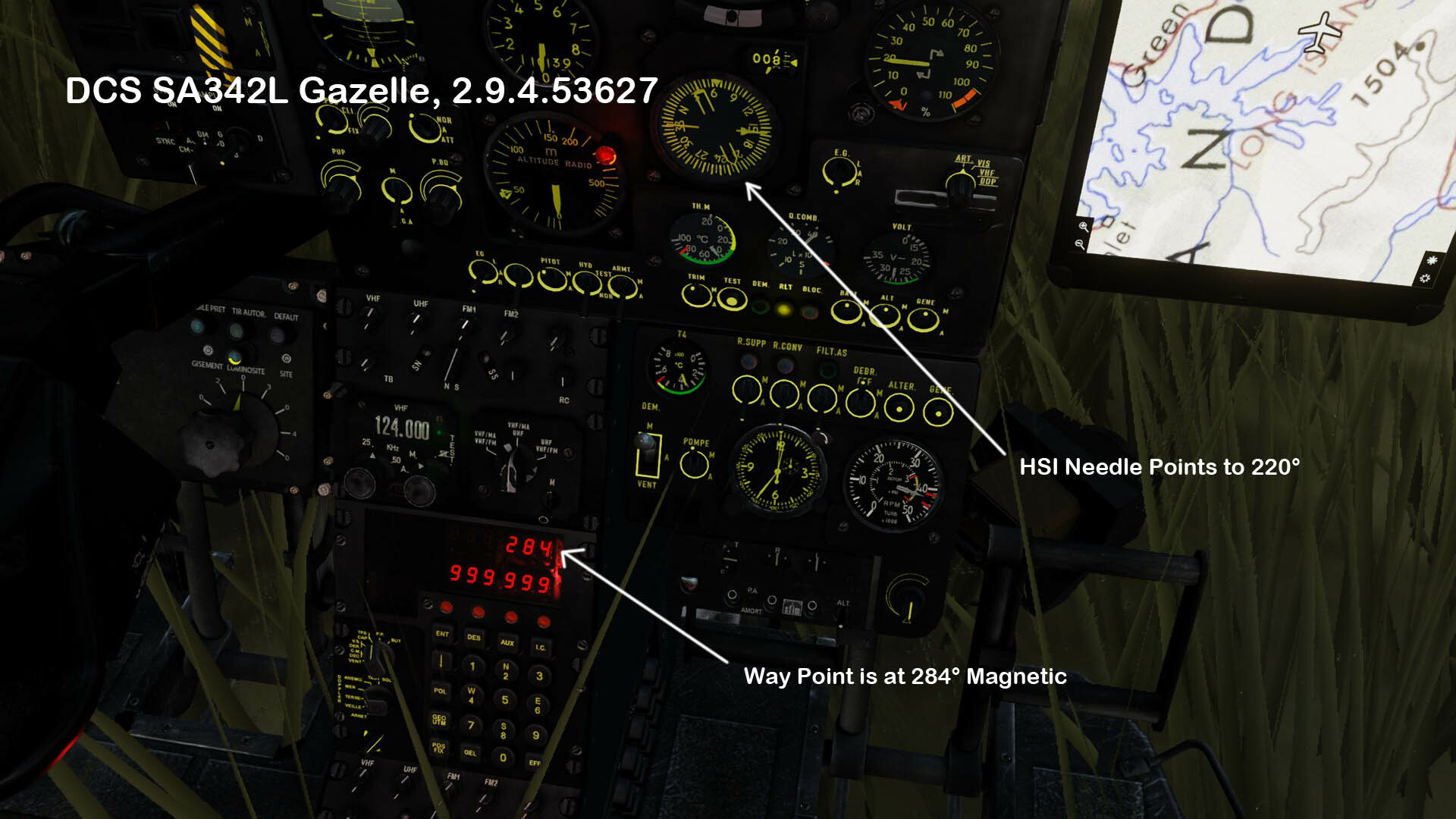
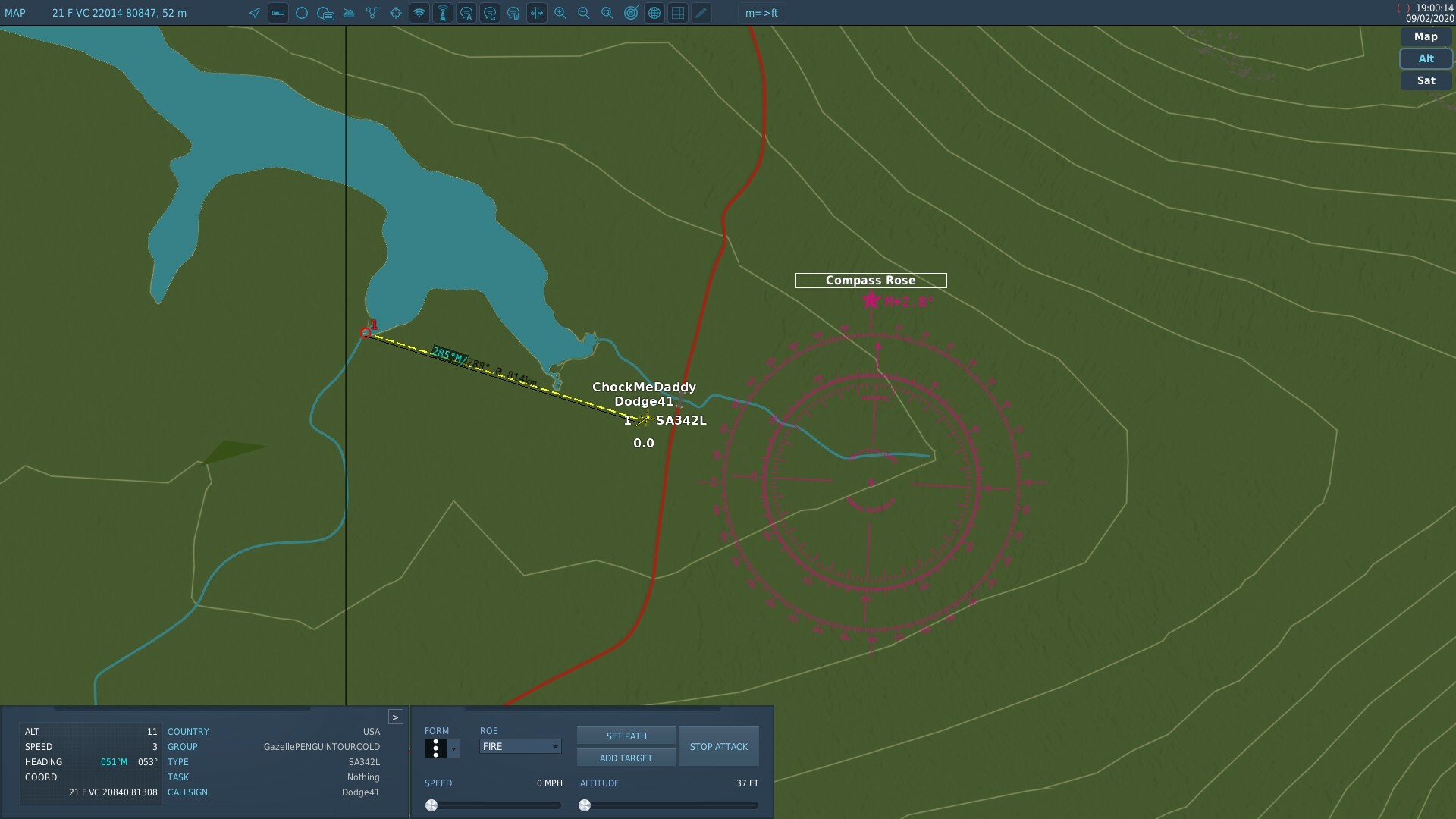
The HSI NADIR needle in the SA-342L is broken ATM i.e. it doesn't point to the selected waypoint as it should. https://forum.dcs.world/topic/347051-nadir-waypoint-issues/?do=findComment&comment=5415678 AFAIK the Gazelle's NADIR is working correctly in the M1 and Minigun versions.
-
Which Version Is Which (And Flyable) For Kneeboards/Skins
Ramsay replied to DragonSoulkin's topic in SA-342M Gazelle
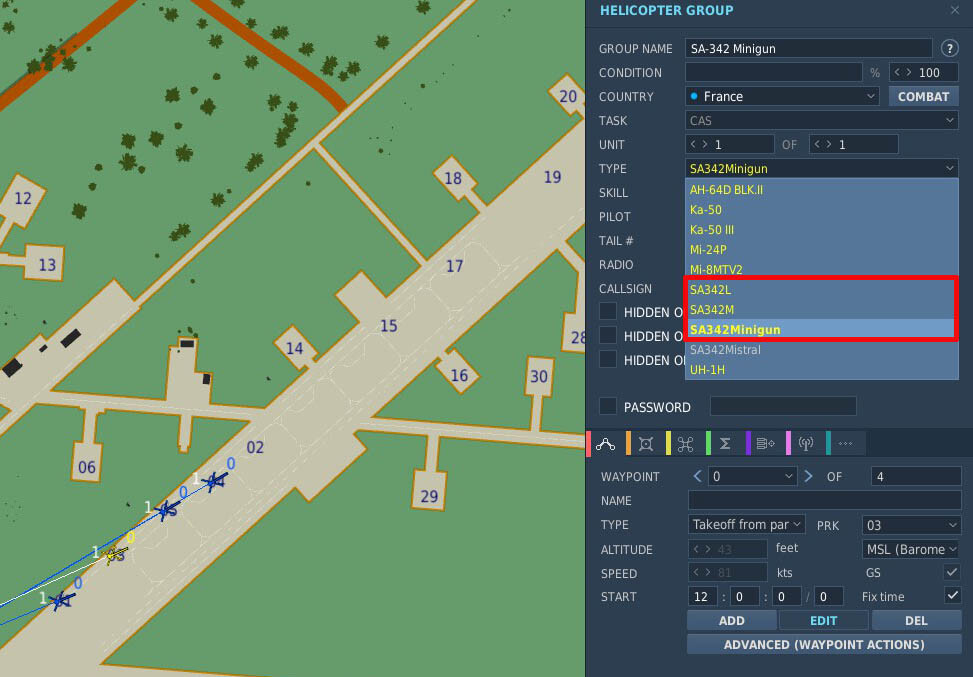
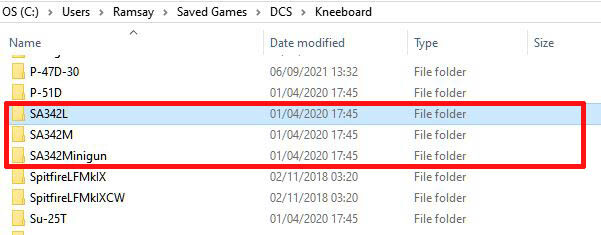
@DragonSoulkin Currently there are 3 Gazelle versions that are flyable by the player • SA342M • SA342L • SA342Minigun The 4th (AI only) version - SA342Mistral is kept for backwards compatibility with older missions that used the old Mistral version as an AI opponent. (Players can now load Mistrals on the L and there is no longer the need for a separate version ). Here is an example of the Gazelle's kneeboard folder names that are required to have custom pages in all 3 player flyable versions.
-
I can confirm the HSI "NADIR Double Arrow" no longer points to the correct WP azimuth. Switching the NADIR's Parameter Selector to TPS/CAP (WP Estimated Time / Heading) - the NADIR's WP heading reads correctly, so the fault is with the HSI needle. F10 Map Overview. I also confirmed the HSI's Waypoint needle was incorrect in a Caucasus Mission with zero wind. As reported here, the NADIR needle bug only appears to effect the SA-342L version.
-
Auto-Hover without auto-rotation to the left?
Ramsay replied to trimmermedal833's topic in SA-342M Gazelle
Below the main panel starter and pump switches are the ALV (hover) and CVS (slaved) lamps which are yellow when armed and green once active/in parameters. The slaved autopilot will try to track the periscope/Viviane sight which moves with helicopter body unless ground stabilized • for the L use the "Periscope Command Box" Stabilization toggle • for the M, the Viviane sight will ground stabilize after it's first manual slew Because of these issues, it's probably best to switch to the co-pilot seat first (with same control/axis settings as the pilot) and setup the Viviane/Periscope, before engaging the Hover and Slave modes. AFAIK the current autopilot Hover and Slave modes are still WIP due to the Gazelle's new/more accurate flight model. Gazelle L Autohover test, 2_9_3.trk
-
Which manual is that, I don't see a 40,000 ft climb listed in the DCS MB-339A Flight Manual ? Climb rates in the Real MB-339A Instrument and Navigation flight planning section assume a 12 minutes taxi, take-off and level acceleration prior to initiating the climb (i.e. 80 kg fuel burned). Starting with 2x pilots, a clean configuration and full internal fuel (half full wing tip tanks), the RL manual gives a 30,000 ft climb @ 38 NM / 7.5 minutes / 222 kg additional fuel burned. The DCS MB-339A Flight Manual (Page 26) shows a Climb to 30,000ft performance spec. of 7.1 minutes (so is perhaps without filled wing tip tanks). When testing, I found the real MB-339A flight planning tables worked well enough for DCS i.e. climb distance/time +/- 15% and fuel used covered by the 200 kg planning reserve.
-
"dcs-20240320.log" still has too small of a page file - DCS/Windows is likely running out of memory.
-
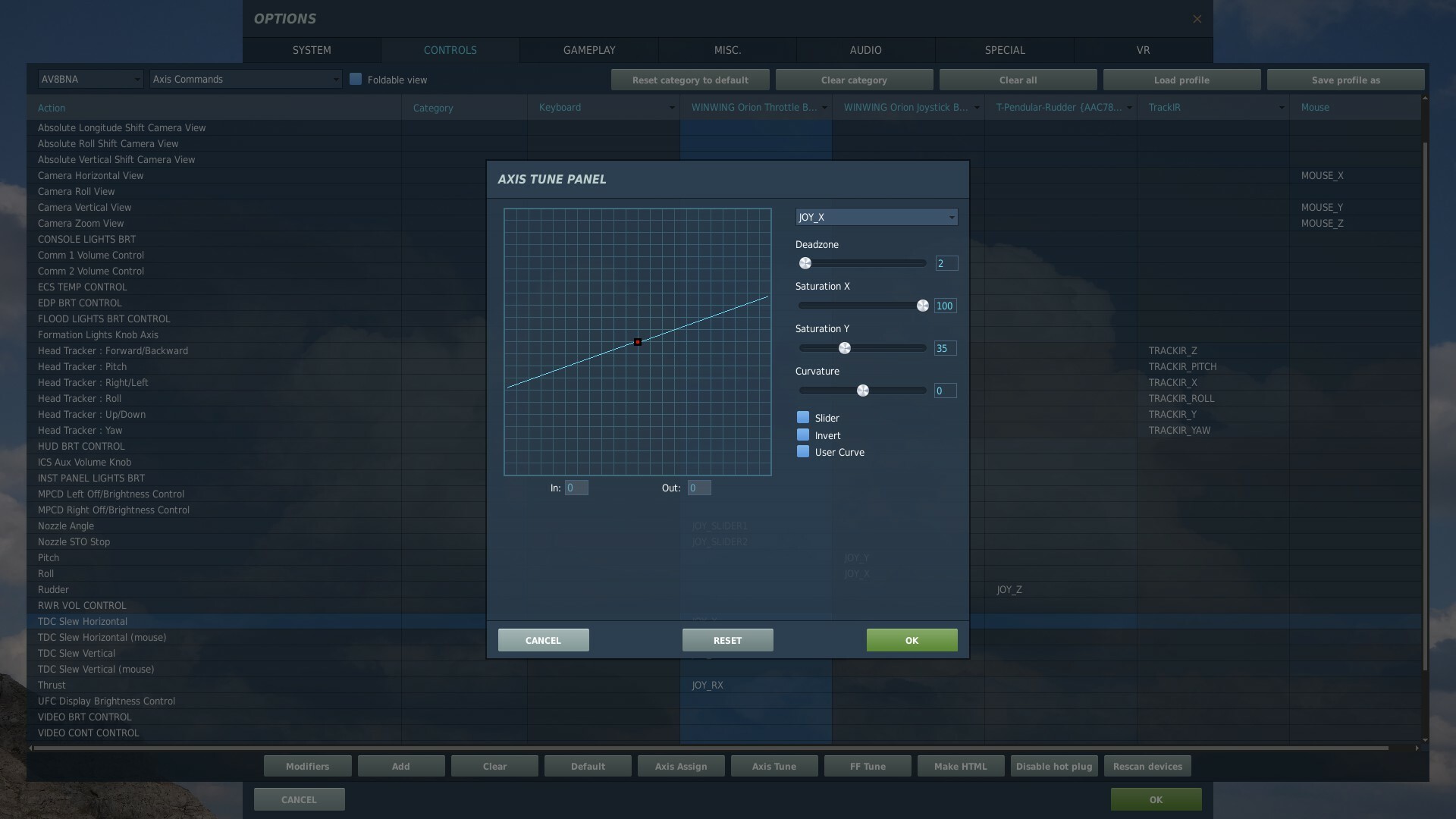
AFAIK not really - as the issue comes from still having a input on the opposite axis (i.e. a slight input on horizontal axis can cause the vertical axis to "stick"). It can be "fixed" by setting a axis dead zone (size depends on how much drift/jitter the other axis has). Here is an example of my Winwing TDC axis setup, which is a compromise for sensitivity vs slew speed - YMMV. Similar thread Re:TPOD slewing https://forum.dcs.world/topic/331645-tdc-slew-axis-horizontal-especially/?do=findComment&comment=5270402
-
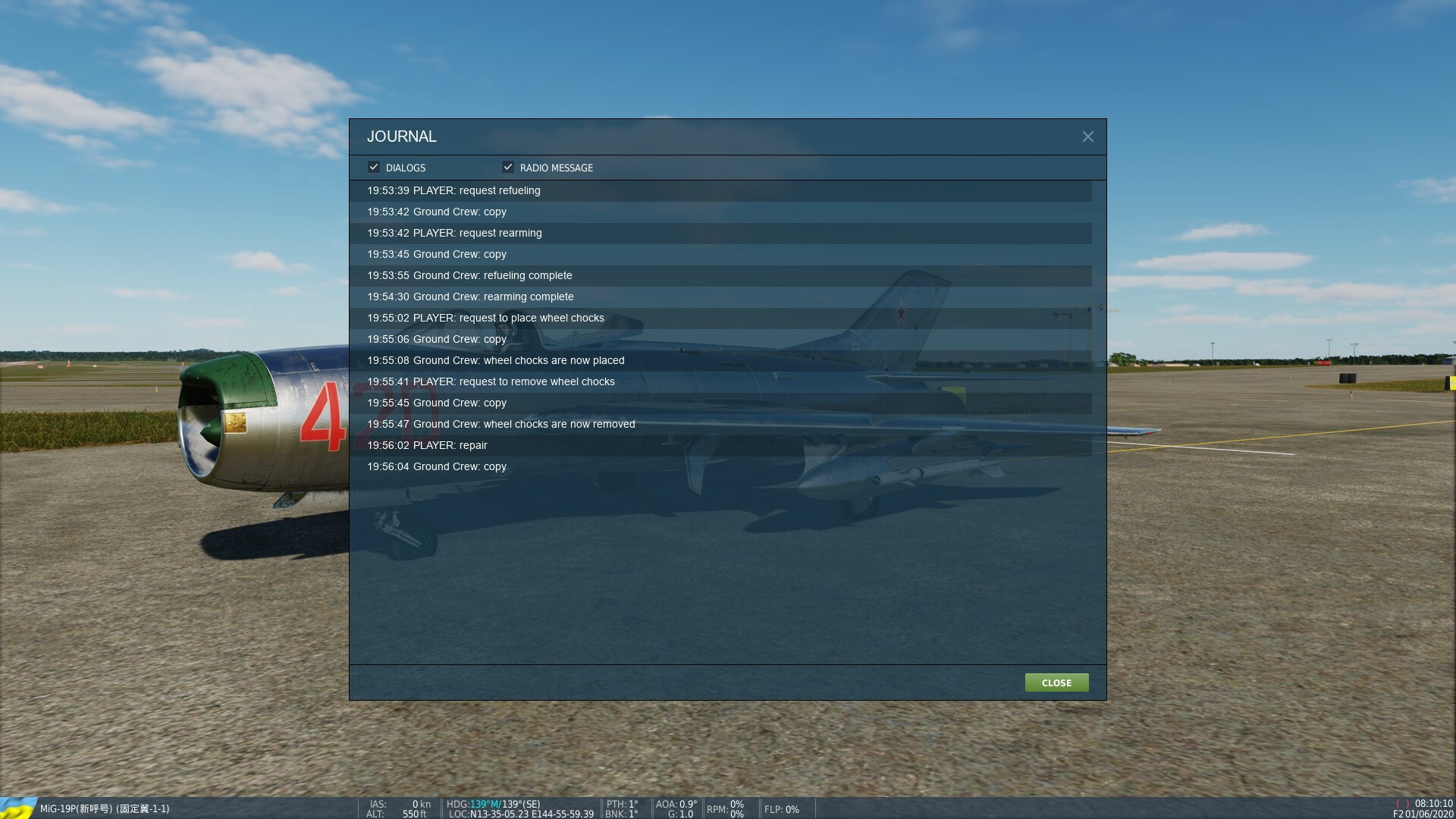
What makes you think you've damaged your MiG-19, when I watch your replay - the ground crew rearm and place/remove wheel chocks as requested. They also acknowledge your repair request with a "copy", AFAIK when there's no repair timer, there's nothing to repair.
-
I flew for several years using the twist axis of a MS FFB2 Joystick - so flying the Gazelle is possible with your setup. Starting out - it took me around 12-18 hrs of practicing hover taxiing around airfields, etc. to get comfortable coming from the Huey, etc. My son started flying DCS helicopters in the Gazelle, so while it's not the easiest to start out with due to it's sensitive controls, it's certainly possible. Note that different loadouts, fuel weights and versions i.e. M, L, etc. can have an effect on how easy it is to fly. If you haven't already - I suggest starting with air spawns and getting comfortable with it in flight and only then moving on to the more difficult aspects of hovering, take off, etc. that IMHO require time and patience similar to A2A refuelling in fixed wing aircraft (you can sort of "cheat" as a newbie - and use a quick "jump" to get into the air and worry about landings later). Perhaps this tutorial from deephack will help ?
-
Not sure why things have changed - taking control of your track, I could engage the Autopilot Modes/Lamps, once I reset the Autopilot using the • Autopilot disengage lever (Control Stick paddle switch) Tested DCS Multi-thread Preview 2.9.3.51704 F1EE auto pilot works after AP disengage lever rpt richskinns.trk
-
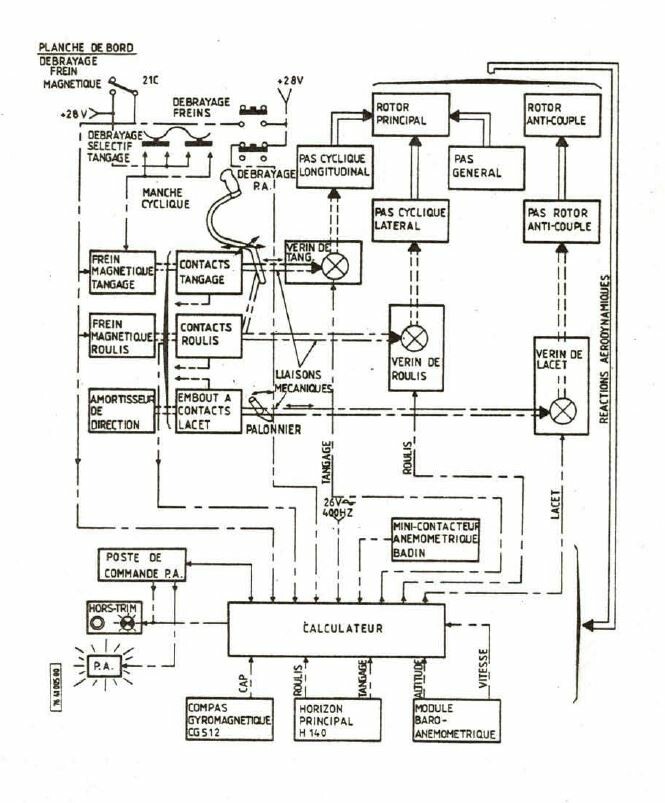
AFAIK the pilot's desired SAS attitude and heading is set using the same cyclic button as magnetic brake. The SA342 SAS receives inputs from • Heading - Gyromagnetic compass • Pitch & Roll - Primary ADI • Altitude/Speed Hold sub-modes - Barometric Altitude/IAS from the Air Data Module • Air Speed above/below 90km/h (49 knots) - Badin Switch • Pilot control input - Pitch, Roll and Yaw linkage micro-switches Heading is maintained with the SAS Yaw channel below 90 km/h IAS and switches to using the Roll channel when above 90 km/h IAS A French 1970 SA342 Historic Flight Manual is available from www.alat https://www.alat.fr/documentation-alat-manuels-instruction-techniques-manuels-manuel-equipage-sa342-m-1970.html Section 1.7 describes the Autopilot and starts on page 65.
-
There's no ETA but IFE Duke posted this on their discord last week So work is in progress.
-
Gazelle just falling out of the sky in air starts
Ramsay replied to GrEaSeLiTeNiN's topic in SA-342M Gazelle
The Engine shuts down with the FUEL LEVER if the "Starter" switch is in the middle ARRET/OFF position. When in flight - the "Starter" switch should be UP i.e. in the MARCHE/ON/RUN position. Currently the Gazelle spawns with the "Starter" switch in the incorrect ARRET/OFF position, so it needs moving to MARCHE when selecting an air spawned or hot started Gazelle.




.jpg.ed705efeb84e27f77e25959e6d9a033e.jpg)

.JPG.58dd58c05b65dd56ed27979da06be7ba.JPG)