Fri13
-
Posts
8051 -
Joined
-
Last visited
-
Days Won
4
Content Type
Profiles
Forums
Events
Everything posted by Fri13
-
The Harrier was tested for automatic landing (shipboard-relative GPS) 15 years ago already. It did not go further even in last decade, and it has nothing to do with Scorpion helmet system. The Scorpion helmet has nothing to do with the JPALS (Joint Precision Approach and Landing System) that F-35B has already had a couple years for couple carriers. It is going to be added to all in the future. The helmet system that you talk is as well working with the JHMCS as it was tested on it but it as implemented to the F-35 helmet systems to show the pilots the data. But none of these has to do with a A-10C having these technologies as it is not relative to the helmet, and that DCS doesn't have a A-10C that is technically compatible with the system you are talking about.
-
So let me say it differently for others hypothetically. Let's say that one's joystick has +/- 35 degree gimbal movement. Applying a 0.5 degree tilt to the right causes Gazelle to continuously roll to the right at 0.5 degree a second. The rolling to right will not stop (in 2 seconds it is 1 degree roll to right, in 4 seconds it is 2 degrees, in 6 seconds it is 3 degrees etc) before the cyclic is returned back to center (0 degrees). And having the joystick centered keeps that X degrees roll angle to right infinitely, until joystick is tilted to left X degrees and then the Gazelle starts to roll to the left X degrees per second until joystick is again centered to 0 degrees. That is how fixed aircraft work and not like helicopters work.
-
I take anything extra from the current empty airbases etc. I have just one main requirement that is "unnegotiable". All those needs to be automatically in the place for the missions without mission designer required to manually place everything in there if the base settings is set so. If a parking slot is by any means set to be allocated for any respawn (by client or player or AI) then it should have all those in place. They should move to the location first if it is empty and pull the proper aircraft from nearest hangar or something if it doesn't exist there. IMHO the ED should anyways make a living airbases as default thing. Where troops are moving, vehicles are driving around, there would be some static aircraft in service etc. A bonus would be getting a option for the airbase to make it "functional" so that some random aircraft will actually start taking off and go for some random patrol and then return. Just like in the RAT script (Random Air Traffic) but without requiring to actually use these third party scripts. In a airports that has civilian aircraft, they would have their busy traffic going. It would make them more interesting to fly and operate by seeing the planes flying to some random directions (proper directions to foreign countries etc) and just disappear at the edge of the map of infinity (meaning you could chase it 500 km outside of the map but it would eventually just be "ghost". I wrote somewhere in a reply how to do the animations based how the aircraft is parked in the proper slot. So if the aircraft is not properly centered (red cross inside green zone) in its parking slot then either pilot needs to move it or a tug will come and move it to center of it. If the aircraft is centered inside the proper area, then all the service personnel and vehicles and such will come from the nearby service center/hall to correctly allocated positions (blue zones) around the slot. In that slot then personnel will move dynamically to around the aircraft (red dots etc). This would allow players to taxi to parking slots and be careful to get it in proper position. And then wait that the service personnel and equipment will arrive there if it was a uncalled one. Otherwise you would be taxiing to parking slot that was designated for you after landing and there is the ground crew already waiting you and guiding you properly in.

-
I can see this feature important for those who have a full 270 degree multi-projector home simulator where the view stays locked as they need to move their head in reality physically. So having a JHMCS/HMD separated from the view to be assigned for any axis (TrackIR) then it would allow them to use as well the helmet mounted system with TrackIR because they could set it to 1:1 and have it follow their head movement while projects draw everything stationary. For those who want to little modification for their TrackIR, you can add small transparent plastic caps over the TrackIR infra-red leds. You can buy something like this: https://www.ebay.com/itm/193705359885?hash=item2d19bd3a0d:g:xtIAAOSwmNtfg2Dt There are similar shaped like LED diodes are so you can just get it around the TrackIR lamps. But before so, sand it with fine sandpaper so it is not clear anymore. Then it will be frosted and it will show the IR light source on every direction. And you can then turn your head over 90 degree as the TrackIR can see the three IR spots and calculate the direction via that way.
-
Is the canopy suppose to be opened by just pulling the unlock lever without first opening the sealing lever? It seems to me that I should first require to unseal the canopy and only then get access to pull the unlocking lever.
-
The MiG canopy is currently opened by clicking a left edge of the cockpit, but it is as well the place for close it. While when the canopy is open, you can click the support bar at top to close the canopy as well. This makes it so in the VR hand controllers that when you move hand close to the left cockpit edge the canopy will open and close immediately as the zone is for both open/close. The "Open" part should be moved from cockpit edge to the canopy edge so it would move with the opening canopy high above you. And then if wanted to close the canopy, you need to click the support bar at the top to get it closed. This way accidental open/close/open series doesn't get triggered as the function to close is not on same zone as open is.
-
Is the map worth of money? even when on Sale?
Fri13 replied to GumidekCZ's topic in DCS: Normandy 1944
Agree. I wouldn't take Channel or Normandy for the faster jets than a L-39 or C-101. A-10C fits there nicely but it is already so slow to begin with. Flying example L-39 in those works for a navigation training and common sight seeing, but for that helicopters are already better because nicer visuals (sadly F-16 can't be used as it is so fast). The WW2 era maps are really more suited for WW2 era aircraft as said. IMHO the Caucasus would become far nicer if there would be community edition for tweaking the visuals (adding trees and buildings) that changes would get then later on voted to it officially. As after flying in Channel or Normandy it starts to feel that other maps are little "empty" in such details. Maybe that is why I don't do so much flying in Nevada and Persian Gulf as they are so empty mostly and I don't like their terrain desert textures and low resolution height maps. In Syria I have enjoyed flying just the long routes as there is fancy small places all over, like follow roads and you see small family building area or so. -
All controls are modeled wrong and not just cyclic, and then there are other subjects like the 20 mm cannon has no recoil, the missiles has no recoil, the tail wind direction as I mentioned above post (in the end) is wrong (Gazelle flies within wind and can't turn into the wind as it has no authority, the wind pulls the tail instead pushes it) and various other from engine power to mass dynamics etc. Yes, it is the smallest one we have and only one with the European idea of the anti-tank helicopters with just few ATGM. I am waiting the Bo 105 PAH-1 with its six HOT missiles instead just four. Even when the Bo 105 was just a temporal helicopter to fill a waiting time to get a proper combat helicopter out (Eurocopter Tiger) and it is not really different from the Gazelle, it still be something unique. As the Gazelle and Bo are both underdogs. No armor, no good weapons, just small and agile and that is it. They never really developed anything like example Kiowa did with its mast mounted sight for laser designation, hellfires, rockets, good MG and doctrinal way to fly without doors and shoot from there etc.
-
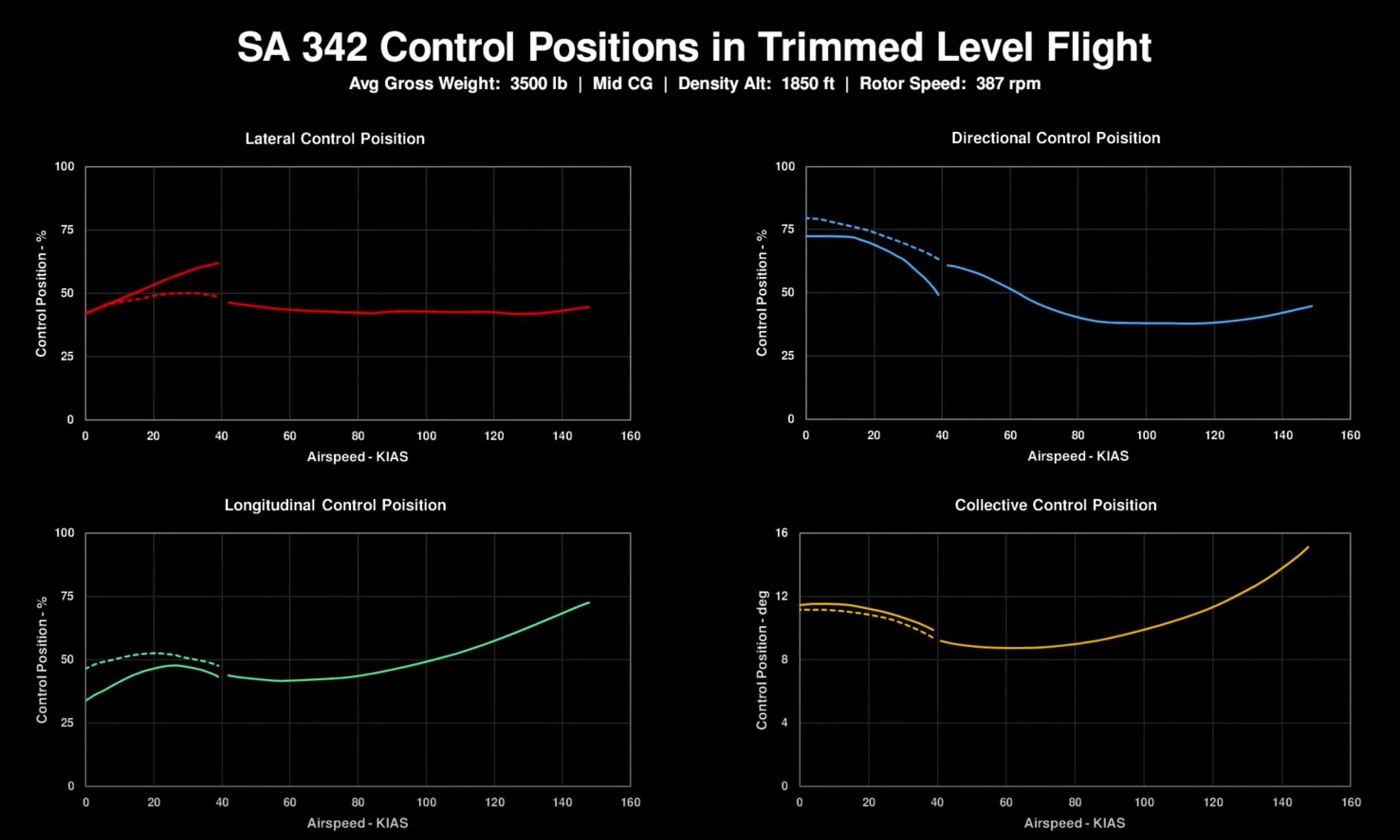
Just like the US Army Air Mobility Research And Development Laboratory documentation about the Gazelle flight controls position, the 50% literally means center. X movement 0-100% scale the 50% means cyclic is at the center. Y movement 0-100% scale the 50% means cyclic is at the center. Collective 0-100% means collective max movement range from bottom at 0% and maximum up as 100%. Pedals are at 50% at center, 0% and 100% being corresponding full left and right. In the documentation the Center means physically center cyclic. Cyclic is not moved in any direction more than others. If you need to move cyclic to one direction to maintain hover or level flight, then it is off from center position (50%) and is measured in physical position for the status of flight. That is in reality, but that is not so in the Gazelle. And that is the problem. You will maintain cyclic at the center position regardless your speed, pedals etc. You are not required to correct controls positions to maintain attitude. As you quoted the book, it happened. The pilot went to too high right bank and he had cyclic in left stop and there was no more any authority in his cyclic to stop helicopter from rolling to right. Event lead to crash. This is same thing in many other helicopter cases, especially when higher winds come to play. You need to plan carefully your approach and which side you will turn as you do not have same turning capabilities to both sides (just like as your quoted book text says, Bo-105 has slow roll to the left, while faster roll authority to right. And if you come to turn to the left in the wind, you can find yourself that you have no authority to overcome the wind with cyclic etc). What is not required in the Gazelle either.... You have full authority to fly almost in any wind conditions (I have tested up to 60 meters per second and no effect to Gazelle) Yes it would take nose up. But the DCS: Gazelle does... Our DCS Gazelle doesn't have that. Here is only collective and pedals being used. First only the collective ramping up and down as maximum. Then only pedals used by going full left and full right. Maximum input is given with those two. And neither one is used simultaneously, but only one control at the time (first just collective, then only the pedals). The cyclic is not used at all. It is always centered (50%) People here claims that is a fully proper helicopter flight modeling and behavior. Not in forward flight but in hover etc. The Gazelle in DCS is not affected by the wind. It will only start to move you laterally to wind direction but it does not matter are you in which way or what attitude as the wind has no other effect than just "sliding you with it". The wind strength and direction matters for the helicopter attitude, cyclic and all. There are limits for max wind where helicopter is allowed to fly. Example for the Mi-8 IIRC it was about a 16 meters per second. Like the Mi-8MTV2 manual: Page 39: "Main rotor thrust varies strongly depending on atmospheric conditions: free air temperature (FAT), wind speed and direction, and barometric pressure at the altitude of the airfield. This variability necessitates performing a hover safety check prior to initiating any takeoff to ensure safe flight operations." Page 228: "Any headwind increases maximum takeoff weight: +200 kg at 5 m/s; +1200 kg at 10 m/s. Crosswind up to 5 m/s reduces performance by affecting the tail rotor and increasing engine power requirements. Reduce maximum takeoff weight by 200 kg in the presence of a crosswind of up to 5 m/s. At greater crosswind speeds, translational lift effects become more dominant. Performance reduction in tailwind conditions (blowback of hot exhaust gases into the exhaust system) is not modeled in the simulation. When calculating wind corrections for maximum hover weight, consider that wind speed and direction may vary during takeoff/landing. Assume the lowest maximum hover weight corresponding with possible wind variance. If wind conditions cannot be determined, assume poor hover conditions of 4-6 m/s tailwind." Page 268: "E. Wind speed during taxi must not exceed 15 m/s. In crosswind conditions, the helicopter tends to turn into the wind. Correct any uncommanded turning tendency with slight opposite pedal and any uncommanded roll with slight opposite cyclic." Page 288: "Vertical takeoff and landing on an incline in wind speeds up to 5 m/s are permissible from any wind heading. In wind conditions above 5 m/s, vertical takeoff and landing on an incline is permissible only into the wind and within above grade limitation guidelines. Always attempt to perform takeoff and landing from an incline in either a nose or right side up incline position. A nose up incline position is best." With a 16 m/s wind the Gazelle flies without any challenges any way wanted. When put a maximum 50 m/s at 10 m that makes 105 m/s wind at 500 m, then flying Mi-8 is crazy as you can only keep nose into wind, but you can fly like flying at high speed (180-250 km/h). With Gazelle things gets interesting as you can not turn into the wind. The tail is forcing you to fly within the wind. It is challenging to get Gazelle turn in the wind as you need to nose up and pull fancy vertical roll to get nose into wind and even then it will slip 180 degree very quickly as tail has zero authority to keep nose into the wind. So it is like flying a 250 km/h backwards without any problems. The Gazelle just does not follow real Gazelle flight controls, real helicopters control inputs requirements and it is even flying backward faster than other helicopter barely can forward. Gazelle Flight Controls max wind.miz Yes that mission is ridiculous with 50-106 m/s wind but it presents very well one of the flaws in Gazelle that I didn't realize, that its tail rotor effect for wind is inverted. You are headed to North, and the wind is blowing from the North (so you are flying into the wind). And Mi-8 will not have anti-torque rotor authority to turn within the wind (turn to South) as wind is blowing way too hard. But in Gazelle it is opposite, you have no authority to keep heading to North but you will flip heading to South. And you can apply full pedals to get Gazelle to point West or East through the South, but you can not turn Gazelle into the wind.
-
He was meaning that there is a own box in avionics bay and from there comes a own video feed cable to ABRIS that would behave as a display for it. This to overcome the requirement to have a additional display added to the cockpit for just the threat display. It is not his job to go such details in hypothetical brainstorming. As he said, have a switch next to KABRIS that will flip between the main mode or external video feed (the threat display). It is not his job to go such details in hypothetical brainstorming. It is not his job to go such details in hypothetical brainstorming. You have the avionics bay with the proper "black box" that process the data from sensors and only outputs the threat display over video feed to any display. You really do not understand the difference between a reasoning and discussion in hypothetical scenario for why something could be reasonable when already gone to "fantasy" (as you like to say). So why to nitpick about technical details about hypothetical scenario? And maybe the L-140 LWS is so simple device, each optical sensor is directly wired to each corresponding light in the box. When the sensor receives laser energy, it will generate a signal that gets to its own box, and from there that signal is sent to the box where corresponding light will lit up. There is no software in play, there is no graphical user interface to be done as it does not do anything else than just say "Laser energy detected in front left sensor". There is no logic programmed to tell that what direction or what kind laser energy it is other than ranging or guiding/designating one. It is just "Front sensor got painted by laser energy" and that is it. So do you know how much challenge it would take to program a digital computer that KABRIS is to receive those sensors signal and present it as some meaningful graphical interface on its screen, when just a small box with four lights in it will get lit up, and maybe is the top or bottom proportion of the sensor (could have a prism to detect the upper/bottom from horizon). I would be happy for the LWS box being used for it. It would just give a lot off false-alarms when wingman launches or someone even fires a cannon in couple kilometer distance etc. Basically you get warning on everything with that logic, while the President-S whole system logic is that it calculates the range of the launch, the missile direction (toward you, or flying somewhere else) as threat assessment and then it waits that the missile gets close to proper distance before it initiates the counter measurements and jamming process to maximize the effect.
-
That is what we have been saying.... When you roll to right and you have banking to right, you can not keep cyclic centered because the helicopter starts rolling more and more to right by forces. That is why you need to start applying a left cyclic to keep helicopter from flipping over to right by increasing forces. You have the cyclic at the full left, limited to maximum scale. (0-100% scale the 50% is center, so you are at 0% at that moment). If the roll continues to right, you have nothing to do as the cyclic is already maxed to left, and you will flip over. In gazelle you turn cyclic to right (ie. 55%) to start right bank. Then you return it to center (50%) to maintain right bank. There are no forces to flip gazelle around to right. When you want out of right bank, you just apply left cyclic (45%) to roll left and when you are in level you return cyclic to center (50%). This with all augmentation systems disabled... If you have sidewind, example blowing from the right, you should be required to apply right cyclic (into the wind) as otherwise wind will roll you over to left. But in gazelle the helicopter stays in level and it will only start to move (slip/slide) to left without any rolling. You don't need to apply cyclic to stay in level. This with all stabilization systems disabled.... With gazelle you never run out of the cyclic authority. You fly with cyclic centered. You don't need to use cyclic or pedals to fly with just the collective. You don't need to touch cyclic or collective to fly with just pedals. And you don't need to touch collective or pedals to just fly with cyclic. Gazelle flies like a airplane with all stabilization/augmentation systems disabled. If you don't apply anything (keep centered), it will go straight and level. With other helicopters you need to use all controls all the time to compensate each control changes in advance.
-
Harrier has FBW and it has this "HIGHLY ACCURATE NAVIGATION SYSTEM". Harrier is already in the game. (Yes, it system modeling is not that great, but those systems are already "there".) But Harrier is not funded for scorpion, the USMC opted for JHMCS already years ago. The deal is already done. Funds are allocated for the program and so on. Harrier doesn't have a autolanding system, it is not a secret. It is all hands on... Nothing else than pilot skills to get that plane down. Harrier is not a F-35B that has that feature. Because some civilian version has a synthetic runway, it doesn't mean that military version has it as well.
-
There you are wrong. - They have wished a new cloud system so clouds block line of sight in A2A, A2G and S2A combat. - They want the new FLIR system to start being affected by weather and temperature changes across the time of day so it wouldn't be so super easy to spot units. - They want proper targeting pods optical limitations modeled, so finding ground targets become challenge and getting target coordinates. - They want proper laser systems modeled so you can't just designate target from a 20 nmi and opposite side of vehicle etc. - They want proper weapons seeker limitations, fuze times, warhead effectiveness etc. - They want proper counter-measurement systems, flare, chaff, jammers and all. - They want proper radar detection capabilities, limited ranges, dynamic RCS, weather effects, and all. - They want proper service times for modules, not just a single year but the complete service history based to technical specifications and not to politics or religion. - They want improved damage systems that cause more sudden malfunctions middle of flight, that would require to through checklist in start up to minimize those. - They want more realistic munition flight dynamics, like bang-bang control surfaces and so on. - They want more realistic G forces effects to virtual pilots, the limited head movements in high G and seriously limited vision when doing so. As well having stamina modeled so one can't keep pulling high G constantly forever, especially on planes without G suite. - They want better AI for ground units that would understand and react to threats by hiding, concealing, smoking, moving etc. Communicate between units to share threat picture and work together to take them out. - They want more realistic SAM systems capabilities and doctrines to make pilots lives miserable and dangerous. They basically want game to become more realistic, more challenging, more risky, more demanding and more about experience of reality than people who just start calling others by names and use circular reasoning to try just stop more challenging and realistic scenarios from happening. There are as well those who want the latest and greatest, but they are as well those who then buy those latest and greatest. Like F/A-18C Lot 20 instead F/A-18A, or A-7 instead F-15E or F-4 instead F-14 or A-10A instead A-10C with latest tech... Luckily we are getting something older on the Russian side so we don't get Mi-28 or KA-52 and all fancy most modern things like west side goes. Mi-24P from 80-90's with old RWR is better than one Mi-35M with glass cockpit and latest electronics. Wishes to see a Mi-24D or V is welcomed with negativity "it is not so effective" when people want the "latest and greatest" with most powerful gun to just make things go "boom". And instead having a limited Falanga missile, some people want with latest Ataka with 8 km range and all.
-
ED said that they do not fix the SPO-15 in FC3 modules unless there come a reason to make one for a full fidelity module. It likely is a still in operational use, so the law is on the way. And that way they don't need to touch FC3 modules either at all as SPO-15 is not done by ED. Now our hope is that Razbam should keep their word and deliver MiG-23MLA with SPO-15 so we could get it that way to FC3 as well. Anyways it would be nicer to offer both variants in DCS of Mi-24P to simulate different era.
-
The ABRIS is the whole display. It is(was) sold as such in civilian market as well. What the President-S system is shown, it has a own small display with own function buttons around it. For a such system it has a lot of buttons in it. So trying to get that display to ABRIS will be interesting. But considering that system doesn't just have a IR jammer, it as well has the RF jammer for radar guided missiles and all, it needs to have more configuration options than just "Turn On/Off". When that system is as well designed to measure the launch distance (from the direction and vector) it will have in that the 1/2/4 km missile range and direction symbols. Likely it would. Maybe the switch next to it is just to switch it On/Off, and then have in main menu list a new L-370 page that you can rotate to and then use there the five buttons to configure it. But... What to configure if we don't get the turrets to perform the IR and RF jamming? Can we even have a automatic flare/chaff dispense or only just flares? Or could we configure the automatic display switching logic on/off? So as you say that when launch is detected that is a threat (coming toward KA-50) then it would perform the automatic warning, prepare counter measurement program and present it visually as missile estimated range and direction before executing CM program? Of course I think I would be happy to just get the LWS panel used for the missile launch as well. As if you could even just see in about 90 degree accuracy that where the missile is launched and automatic flare dispense on proper side, then you can perform proper maneuvers to get out of the area. But there are talks that it will be part of the ABRIS so just a new page there. No new display in cockpit or anything so fancy as it doesn't require to start re-ordering whole cockpit to get it there.
-
IMHO the ED has some problems with the input systems reaction speeds and forces across all modules. It is even more so for the WW2 where even slight movement (with 40 cm extension) can result fast responses. Never flown a WW2 era fighter but it just feels odd that these would be so sensitive that you just move stick around the tenth of the full stick movement range and be able perform crazy moves. And then there is always these pilot G effect problem that allows players to do these crazy negative G moves and high G pulls and just maintain excellent vision and look around capabilities. It is like questioning that why in the historic videos the pilots are flying so steady and "predictable" manner when in DCS you can just yank your aircraft around and pull crazy amount to avoid being shot. It is the constant feeling how everything is so "digital" and has such reaction as well. The G forces effect needs to be redone so that we can get the proper forces for pilot to be the consideration how to fly.
-
Yes, the OP is doing exactly the cherry picking fallacy. He specifically shoots to weak points that are vulnerable for 57 mm caliber and then makes a case that whole 57mm is overpowered because you can take out all MBT's by ignoring the fact that he doesn't even try from any other part that would make those 57 mm cannons ineffective. As I pointed out, the new up coming damage modeling will improve these thins in the future by adding various damage effects and more improved damage zones. The current models can be seen in the 3D model viewer. Someone said that there are multiple sub zones in the MBT's so they ain't just "left side" and "front" so you get different results from hitting various parts in them. Nothing fancy, but just more than people think just "It has one HP value". Edit: Just made a simple test with ZSU-57 vs M1A2 Abrams and T-72B3 (likely has the high end damage modeling) and you could get M1A2 Abrams destroyed hitting for that very specific small area, maybe about 50 x 70 cm part with the AP ammo. Everything else was invulnerable for it. Sometimes it was possible get the HE shell damage it from that specific spot. Then just shooting to rear part and it was down almost everywhere. The T-72B3 was invulnerable almost against anything. Managed to blow up one from the rear shots with AP. Each of the vehicle is from 90 degree to 0 degree with 30 degree rotation from opposite side of the runway. But it can be easily see that those two MBT's are invulnerable for 57 mm rounds from every where than those couple spots at the rear. Just as they should. And in future the 57 mm will become far more effective than opposite. As hitting to skirt area will take out the tracks. You can destroy the optics, cannon, engine (if managing to shoot from the hill above them) or other equipment from roof gun to radio antennas and so on. Easiest targets will be the gun, wheels, tracks and optics. What the OP has done is just trying to make a case that 57 mm is too powerful against MBT's by cherry picking highly vulnerable small rear hit zones only. Hit those at any other areas and you are just wasting ammunition at the current damage modeling. ZSU-57_AP_value.miz
-
So you really claim that 57mm doesn't punch through a 20 mm of armor? No... Those armor values are equivalent protections. If you have 71 mm protection and you have penetrator capable go for 93 mm then it will go through. RHA is a equivalence value. The RHA value for the rear compartment is just a 80 mm in total. Sorry, but it is fully commander failure to open your most vulnerable parts to the enemy. The enemy of course is trying to utilize all their tactics to get that flanking opportunity. That is why you have tactics to get that. Why you are not going to stay in the area where you are open for multiple directions as you die for that. What is platoon leader failure to be ambushed in first place. Again you are beating a dead horse. Don't you understand that I said already that it is not a tank destroyer? The classification of "Tank Destroyer" is to have vehicle that main purpose is to only destroy other tanks. It can be slow as tortoise and so heavily armored from the front that it can take beating from front while having enough power to put any tank out of the action from the flanking positions. It doesn't even need to be a cannon that is used but it can be a simple ATGM to perform the role. Personal attack is not an argument. It is just signal that you have no valid argument and lost. They are tanks. They are just specifically IFV's and not MBT's. It is common misconception that "A tank" means only a MBT because people have only that in their mind. "Tank" is a very broad class that has multiple various other classifications under it. It is like "Aircraft", that includes all kind airplanes and helicopters and so on. Definition of "tank" does not say anything about quality of the armor, thickness or type. "Tank" doesn't say anything about the quality of the armament or capabilities. It just needs a weapon to be combat capable. And what would be that as problem or requirement? Again you are confusing yourself. A Tank vs Tank doesn't mean that they are equal in the performance. You are talkin about Tank vs Tank situation where other is a IFV and other is MBT. And you try to use that as your argument that I have claimed that IFV's are as well protected, armed and capable as MBT's. That I have not done. There is a reason why there are all kind different type of tanks. As not every is meant to be a MBT that is todays most common idea of the tanks. Before MBT there were other more well known classifications of the tanks as light, medium and heavy tanks (and as well super heavy tanks). There are as well others like a "Tankette" idea that even Germany is utilizing today as in Wiesel. Of course you might try to argue that no other tank is a tank than a MBT. But it would be in conflict with everything.
-
We are not talking about old LIPA now that was even blocked by the fuselage from frontal section. I remember that in the presentation years back it was said that in the testing not a single missile hit the protected helicopter, it being 1.0 performing. But there is a claim that there was a downed helicopter equipped with President-S. But don't know much about that. So 0.9-0.95 performance would be then more than accurate. Need to remember that the system can not react to multiple attacks simultaneously. So having a three missiles coming at you will trigger a huge flare show, but likely no IR turret is pointing at third missile. But at that moment the missile might be so blind that it doesn't matter anymore.
-
I am yet to see a production F-35 with a HUD as the whole point of it is that HUD was designed to be obsolete as the pilot helmet projects all the information to their view. Scorpion sight is as accurate as aircraft navigation system can be. It is true at the moment that we have too optimistic navigation instruments and accuracies in navigation systems, even in GPS assisted ones. But the M2000C one is enough for reliable landing finding as it is not about GPS or helmet/visor. But if your point is that these are currently in development and testing, then it doesn't matter if they are not compatible with the modules tech we have now in DCS. If you can't just grab a new helmet and have it do all the work without connection to aircraft and requirement to have make changes to get the helmet paired with the aircraft, then it doesn't matter. I don't know what exact software suite A-10C II should be presenting but I have recollection that people who knew better said that it is mix of the couple suites and not exactly one. But if Scorpion should already have those features and capabilities then why not... You just need to show ED the information that and they listen. Likely ED has already made their minds and you can't get them to reconsider things no matter what. Edit: Scorpion is in the end just a another HMS system. It doesn't provide to aircraft navigation or controls anything to make them fly themselves or assist in landings or flying a route etc. All those needs to be in the aircraft itself already. Like the Thales marketing video about having these systems in civilian airplane requires that you have GPS and other information connection from plane to their system. As otherwise the scorpion can not have information from aircraft like AoA or slip information and present them on it. You could get basic GPS location, GPS ground speed, GPS altitude and electromagnetic compass to give view direction as standalone unit. And load some digital terrain data like airports locations, lengths, and then tall buildings and terrain altitudes at approach/take-off paths. But you really wouldn't be flying with that thing as you have no means to get flight path marker on HUD, artificial horizon or any accurate required information from the plane to it and align it with plane to be able use it land in zero visibility. As if most accurate thing pilot could do is to try align it to plane by adjusting it's position in forehead..... Then pilots are going to die as they can be pointing where ever in time.
-
AV-8B N/A and AV-8B+ are already funded to receive a JHMCS in 2023. Just a few years before retirement. Same time there is coming compatibility to AIM-120C, AIM-9X II, LINK-16 and couple other new upgrades. But one thing I know is that Harrier doesn't have a automatic landing function. It is all hands on. Best you get is Reaction Control System (RCS) and it is nowhere automatic. There is nothing denying you to flip over or assist you to perform proper landing. What comes to F-35B, that has all such things. It flies by itself and it has all automatic carrier landing features and assisted carrier landing and all. What you need to do in it is just to want to do something and you move stick or throttle and system drives and park it by itself. But Harrier has nothing that kind as far I know. It has AWLS: https://forums.eagle.ru/topic/212206-icls-on-lha https://forums.eagle.ru/topic/159087-about-the-awls-all-weather-landing-system-or-ils-by-another-name/ DCS doesn't support AWLS at the moment.
-
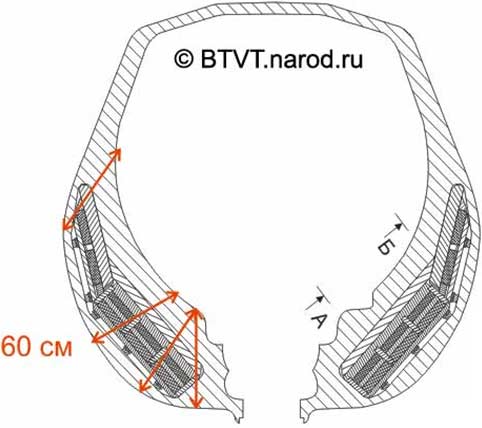
The round in this case is not HE, and not a simple APHE. It is APCBC-HE-T. Quick explanation: "The APCBC munition type was an evolutionary development of the early war armour-piercing capped (APC) shell, itself an evolution of the more basic AP (armor-piercing or solid shot) and APHE (armor-piercing high-explosive) shell types. With respect to armored land warfare, the primary intended function of both AP and APHE shell types was to penetrate an enemy armored vehicle and incapacitate the vehicle and crew by internal explosion (in the case of APHE) or fragmentation/ricochet (in the case of AP rounds)." "Early World War II-era uncapped AP projectiles fired from high-velocity guns were able to penetrate about twice their caliber at close range (100 m). At longer ranges (500–1,000 m), this dropped to 1.5–1.1 calibers due to the poor ballistic shape and higher drag of the smaller-diameter early projectiles. Later in the conflict, APCBC fired at close range (100 m) from large-caliber, high-velocity guns (75–128 mm) were able to penetrate a much greater thickness of armor in relation to their caliber (2.5 times) and also a greater thickness (2–1.75 times) at longer ranges (1,500–2,000 m)." https://en.wikipedia.org/wiki/APCBC The side armors in the modern 80-90's MBT's are fairly weak for AP rounds. We are talkin just tens of millimeters thickness. Example here is a T-80U turret armor thickness: The similar case is with any modern MBT. You want enemy to stay 30 degree angle from your front. Not to allow it to engage you from the sides and especially not to your rear section from any direction. That is the basis of any MBT warfare that you keep your hull and your turret facing the enemy. You turn those toward the threat as your maximum armor is only in the front of hull and turret. If you allow a enemy vehicle like ZSU-57 to slip to your flank, or to shoot you to your flank or rear, you have then completely failed as a commander by opening that shot. (And again this is partially problem in DCS as we do not have infantry modeled in the game as should). Again, that is the limitation of the current damage modeling that is fully functional, damaged (smoking) and destroyed (exploded + burning etc). But example what comes to Leopard 2, the side armors are the fuel tanks behind just about 25 mm of armor. Behind that is about 50 mm of armor before you are fully penetrated completely to the crew compartment. The fuel doesn't add much to the armor, but somewhat. IFV's are tanks, but not MBT's. MBT's are as well tanks but not IFV's. Both are AFV's, but not all AFV's are tracked but can be wheeled. But none of the tanks are wheeled as definition requires to be tracked. The modern (80's to this date) MBT's front armor is something that 57mm will never penetrate. And as can be seen OP didn't even take a shot from front because it is useless. Instead the OP was aiming to vulnerable side armors, to the rear parts etc where the armors are thin and very vulnerable to kill the crew and the engines (in DCS that means full kill at this moment). "Tank destroyer" has on classification, and ZSU-57 isn't such because it is a SPAAG by its classification. It just has capability as well engage ground targets effectively to protect itself if really required. The 57 mm cannon is not a 120 mm one. But it is neither a 30 mm one. And it will take down even modern MBT if you give it a change to get to shoot you at such position that you would not want anything to be firing at you with anything.
-
You don't know anything. And it doesn't matter as you can invent what ever you want to justify your believes. You suggested things that just wouldn't make sense. A 57 mm shouldn't be made act like a 20 mm because someone thinks it is "too powerful because it takes a MBT out with two shots". Please explain how does a MBT have its thickest armor protection all around its hull and turret? Please explain how does a firing distance lower the High Explosive effectiveness on the armor? Do not blab around all you want, please explain why it is true?
-
In VR there is a written rule that you do not move the VR camera position if the HMD is moving. Meaning you do not collide the VR camera on something because the HMD can keep moving. Otherwise you get instant nausea. There are other means to come around that. - Blackout - Blinders - Warning text - Desaturation/Blurring Some of those are that will guide the player to keep their virtual head inside a walls, windows etc. Like if you would have a greyscale view with blurred vision, you would not see anything well but you would pull your head out to see something again. Going blackout would as well work. Getting a G-force effect that your vision would shrink and you see just "end of the tunnel" something, it would work as well.
-
The MWS is part of the President-S. We are just lacking the IR lamp turrets. ED will wire the MWS to ABRIS somehow to show the missile direction/range and if it is a threat or false alarm (that might be left away). It is already interesting that manufacturer has released video that shows already most required informations to implement it to the game. The missing part is really the avionics integration. And it likely shouldn't be part of the ABRIS so that is ED own custom idea. I am against that as we know that system has own display with even two pages visible. We already know from public sources that how system work. You have UV sensors (places already there), you have flare dispensers (already implemented), and you have IR turrets (look, size etc known publicly). You don't need to know turret rotation speed or any frequency or strength of IR turrets etc the game doesn't even model those. All that is required to program is that if missile is fired toward KA-50, the system will alarm pilot (if missile is not coming to KA-50, it is not alarmed as it is not a threat) and wait missile to get to a proper range and then initiate automatic flare/chaff dispensary, turrets turns toward missile and starts emitting and missile is guided away. There is no need for algorithms, no wiring, no power requirements, nothing like that from a game point of view. Give it a 0.95 propability to guide missile away and you have it in. That is how other game developers can do it as public information is already enough. And as ED is going to guess it panel and all, they can guess a lot of things as well from public information. If it is illegal that manufacturer publish these things in youtube etc by themselves... Then ED can't touch it. But if manufacturer can publish it, then ED could only do a IP infringement... And that is again the case about KA-50 overall and it UV sensors, the IGLA system and everything....