andyustim
-
Posts
1835 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by andyustim
-
Парни, а как использовать материалы САРПП (C:\Users\Saved Games\DCS\MiG-21Bis\SARPP)? Есть ли какой-то софт или это намек на будущее развитие модуля?
-
То то я смотрю как его колбасит на посадке. (По виду F2, при опускании носового колеса). А система пневмо- торможения реализована? Т.е. нужно ли возвращать кран уборки-выпуска шасси в среднее положение или нет?
-
По моему где-то было написано держать кнопку не пуск, а "захват". Но ни то, ни это не правильно. После захвата цели РЛС, цель автоматически сопровождается РЛС в заданной области пространства и обеспечивает подсветку цели (для Р-3Р) или формирование командной радиолинии управления и наведения (для РС-2УС).
-
Т.е. при рулении, кран в вертикальное положение ставить не нужно?
-
Парни, как у вас с рулением? У меня постоянно тянет в левую сторону, с открытым тормозным парашютом подрулить вообще не возможно. Такого трудного руления еще никогда не видел (кран торможения носового колеса ставню правильно).
-
По идее, переменным напряжением радиостанция должна запитываться от аккумулятора через преобразователь и работать до запуска двигателя.
-
А смысл?
-
Уважаемые коллеги, хочу внести ясность. Я брал параметр длительности импульса в 1 мкс (соответственно точность определения дальности 150м) исходя из лучших возможных характеристик РЛС того поколения. Технических характеристик РЛС РП-22 не имею. Но если провести анализ из приведенных в посте №30 характеристик РП-22, то картина становится еще более грустная. В ссылке указан параметр мертвой зоны - 300м. Этот параметр РЛС определяет длительность зондирующего импульса. Т.е., когда идет СВЧ излучение зондирующего сигнала, приема отраженного сигнала нет, приемник закрыт. А это значит, что данная РЛС работала с длительностью зондирующего импульса 2 мкс, что соответствует разрешающей способностью РЛС по дальности 300м. Вот вам и точность измерения дальности - 300м. Думаю, спор здесь не уместен, ничего не поделаешь, это техника 2-го поколения. Як кажуть у нас на Україні: "Маємо те, що маємо".
-
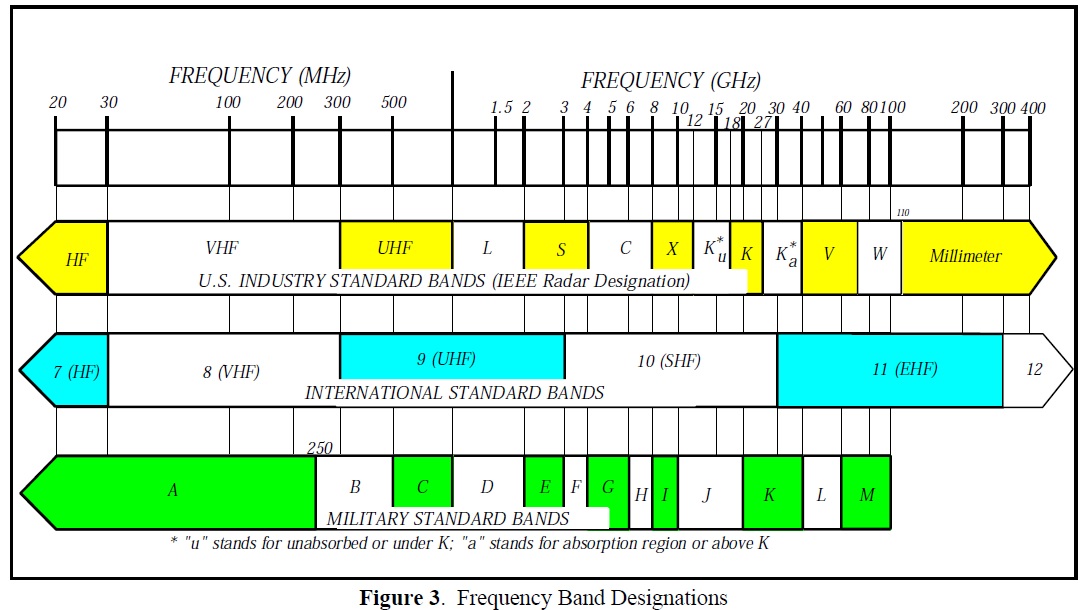
На картинке представлено распределение частотного диапазона (буржуйский стандарт).

-
Уважаемые коллеги, только недавно я купил данный модуль и сейчас разбираюсь с ним, перечитываю все ветки по МиГ-21бис. Насколько я понял, проблема остается открытой. И, не смотря на дату крайнего поста (25.11.2014), хочу внести некоторую ясность с т.з. радиолокации. РП представляет собой импульсную РЛС. Разрешающая способность (т.е. точность) импульсной РЛС по дальности, зависит от длительности зондирующего импульса. При длительность импульса в 1 мкс, потенциальная точность измерения дальности составит 150 м. Учитывая наклонную дальность в атаке порядка 1,5 - 3 км, это очень большая ошибка прицеливания. По поводу захвата цели или участка земли. Это вообще ересь. Например, две цели, находящиеся на одном азимуте и расстоянии друг от друга в 150 м или меньше, будут восприниматься РЛС как одна! Про какое прицеливание и захват может идти речь? А, учитывая неоднородность отражающей поверхности земли (овраги, деревья и т.д.), аналоговую фильтрацию отраженного сигнала, ошибка измерения будет только увеличиваться. Что касается радиовысотомера, то у него действительно точность измерения высоты (дальности) на порядок выше. Но, не вдаваясь в подробности, радиовысотомер работает по другому принципу и использует не импульсный зондирующий сигнал, а непрерывный. Для его работы необходимо 2-ве антенны, передающую и приемную. Понятно, что две антенны в носовую часть самолета не установишь, и принцип измерения дальности непрерывным сигналом (как у радиовысотомера) не подходит. Думаю, что измерение наклонной дальности до наземной цели с помощью РП разработчиками самолета было предусмотрено, но в связи с малой точностью и низкой эффективностью, не применялось. Примерно тоже касается и Су-7/17. С появлением ЛД, у которого точность измерения координат значительно выше, замена радиодальномера на ЛД вполне очевидна.
-
Парни, вопрос по триммеру. По тангажу настройки видел, работают. А есть ли триммер крена, если да, то какие команды управления? Спасибо.
-
Ну это да, просто сам факт ввел в некоторое опасение.
-
Вы меня не правильно поняли. Я имею в виду не видео обучалки, а интерактивные обучающие миссии в среде симулятора, как на А-10C и на первом Ка-50.
-
Парни, вопросик. У меня обучающие миссии Су-25Т на английском языке, это нормально? У всех так?
-
Парни, как отстреливать ловушки (ЛТЦ, ДО)? Я имею в виду какая команда на отстрел? И как запустить программу отстрела которая забита в картридже?
-
В описаниях пишут, что система под грифом и реализована не полностью. Но я думаю такие вещи как отстрел ловушек идет с настроек картриджа. Дополнительно на самолет можно подвесить контейнер РЭБ, вот там уже программы постановки помех, которые реализованы не полностью. Мне сейчас были нужны именно отстрел по программе ЛТЦ и ДО.
-
Нет, это другое. В режиме микроплана местности включался другой передатчик, который работает в миллиметровом диапазоне волн. Это повышает разрешающую способность РЛС по угловым координатам, но его дальность порядка 15-20 км по причине повышенного затухания радиоволн этого диапазона в атмосфере.
-
Кстати, режим доплеровского обужения луча уже появился на Су-34 (на Су-24 его нет). На Су-24 сопровождает наземную цель по РПО штурман и без захвата, а постоянной коррекцией перекрестия. Сигнал с датчиков перекрестия (азимут, дальность) в виде двоичного кода постоянно снимается и подается в БЦВМ для решения задачи бомбометания по РПО. Выходит, что две головы лучше, чем она "умная железяка".
-
Да, можно, но только по не подвижным целям. В режиме GMT обнаружишь движущие цели. Радар захватывает не цель, а точку на местности и соответственно цели не сопровождает. Пока подойдешь для сброса, цель уже будет в другом месте. В режиме же GM по неподвижным целям вполне можно. Но точность маленькая т.к. разрешающая способность РЛС в этом режиме не большая (порядка 10-15 м). А вот если применять режим РЛС DBS, здесь радиолокационное изображение местности близкое к аэрофотоснимку. Высокая разрешающая способность (порядка ед. м) достигается за счет так называемого "доплеровского обужения луча". 2 танка, стоящие друг от друга на 2 м, увидишь как 2 цели, а не одно большое пятно как в режиме GM. Но опять таки, только по не подвижным целям.
-
В реале на F-16 вешается помимо прицельного контейнера еще и навигационный. Вот в навигационном контейнере стоит станция FLIR для ИК обзора и РЛС мм-го диапазона волн. Эти две системы плюс радиовысотомер обеспечивают режим полета с огибанием рельефа местности. Причем, местность огибается не только в вертикальной плоскости, но и в горизонтальной. Обеспечивается оптимальная траектория полета с т.з. рельефа местности.
-
Выше это только рекомендации, но я считаю, что airwar предлагает профиль в режиме A-G со страницей WPN и TGP более правильным.
-
Ну наконец-то! Конечно! Жду времени канала связи.
-
airwar Всегда рад помочь.
-
В учебной литературе BMS-Dash1 рекомендуется настройка МФИ в дата картридже следующим образом: Air to Air: Left MFD (1): FCR – blank – blank (current = primary for FCR) Right MFD (2): HSD – SMS – blank (current = primary for HSD) Вы не рискуете потерять FCR на левом МФД при непреднамеренном нажатии DMS влево благодаря двум пустым страницам. Air to Ground: Left MFD (1): FCR – blank – blank (current = primary for FCR) Right MFD (2): HSD – SMS – blank (current = primary for HSD) Nav Mode: Left MFD (1): FCR – DTE – FLCS (current = primary for FCR) Right MFD (2): TEST - SMS – HSD (current = primary for TEST – but switched to HSD after gear up) MRM mode: Left MFD (1): FCR – blank – blank (current = primary for FCR) Right MFD (2): HSD – SMS – blank (current = primary for HSD) Dogfight mode: Left MFD (1): FCR – blank – blank (current = primary for FCR) Right MFD (2): HSD – SMS – blank (current = primary for HSD)