dvndmmy
-
Posts
21 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by dvndmmy
-
Rudder Trim Movement Takes Too Long in 2.5.5
dvndmmy replied to imacken's topic in Bugs and Problems
While I understand why one would want that with a button... But why should the same apply when bound to an axis? I have my trimmers bound to axes on my throttle, the elevator trim is and was OK, but now it takes ages for the rudder trim wheel to match rotation of my actual physical knob. It is very annoying. Personally, I feel it is a bug - for those of us who use axis for trimming - partially because it was working better before and because processing of button presses should be different from processing an axis (which it obviously is not). P.S. It's not quite handy to trim with a mouse wheel in VR, given the position of this particular piece of equipment in the cockpit (and because I don't use mouse in VR my mouse wheel is bound to buttons on the throttle, so it still won't become faster for me). -
Wait, are you saying that the official response from the official support was "We are not going to fix this ever"?
-
I believe the IPD is passed to the game by SteamVR (or whatever runtime is used to interact with the headset). It is not just to match the physical distance of your pupils within the headset, it is also needed to adjust the 2 cameras in game (one for each eye) properly. There wouldn't be any stereo effect if the cameras aren't spread apart as our eyes are and the scale will be wrong if the distance doesn't match your physical IPD. That said, this should be the default value used by the game - the IPD passed from the VR headset. If it is set on HMD and read by the driver/game properly and there are no scaling bugs in the game (e.g. assets are made 1-to-1 with real prototypes, etc.), you shouldn't even need to adjust anything in game (if you need to, then probably there's a bug somewhere). However, SteamVR's runtime does seem to fail at reacting to HMD adjustments on my Vive lately.
-
The lighthouses (Vive base stations that actually only emit light and do no tracking on their own) are required for any Vive to have any tracking. No way to not use them. There are two options to buy Vive Pro: HMD-only or a full-kit with v2.0 lighthouses and wands. Vive Pro can use older v1.0 lighthouses from original Vive, the benefits of v2.0 aren't really useful in DCS (e.g. bigger play space, less noise).
-
I believe it comes down to 11ms, which is the time per frame at 90fps. Bigger delay is noticeable and breaks immersion. Just like you'd hear a delay speaking into a microphone through a lagging audio interface, for example. You obviously can get used to it, but not hearing the delay at all is also obviously better. Anything less than 90fps is quite noticeable in Vive, for example. You can live with it, sure. Especially if you don't have anything better for immediate comparison. Haven't tried the Rift and its ASW though: it wasn't officially selling in my country when I got the Vive. Sent from my E5823 using Tapatalk
-
Found it on the russian site. https://virpil.com/ru/support/downloads Don't know if it will be of much use to you, though. Sent from my E5823 using Tapatalk
-
Did you re-calibrate the axes? That seems to be a requirement after re-flashing firmware and loading default profile, for example. Also, there is a setting to remap both throttle levers to a single axis. The connector is actually a button and by default remapping occures if it is off (which is "connected"), iirc. Sent from my E5823 using Tapatalk
-
Yeah. A torque wrench. Didn't know the proper name. (Neither do I know how the thing works.) A google translate from Russian manual (I don't see English version on their site): Adjusting the load forces on the motor handles (2 and 3) are additional functionality and are designed to improve the convenience use for the user. Adjustment must be carried out with a torque wrench with a HEX packing H5 (under screw M6) and using the hole (22) in the case of the base of the throttle. Customize acts immediately on both handles (2 and 3). Twisting the adjusting screw counterclockwise weakens the force loading up to free running. Twisting clockwise increases strength loading on the handles of the engines (2 and 3) up to 1 kgf. When setting the loading force on the handles, there are restrictions: - maximum number of turns of twisting of the adjusting screw in the hole (22) after fully loosening on the handles (2 and 3) no more than 1 turn! - maximum torque when tightening the adjusting screw in the hole (22) should not exceed 12 Nm! - adjustment of load forces is allowed only with a rigid fixing of the base in the operational position! - check the loading force on the handles (2 and 3) when twisting or twisting every ¼ turn of the torque wrench!
-
1. No 2. 1.0 Got back to stable from openbeta because of this.
-
I thought I'd share my two cents too. Mostly he things I'd like to be better. The throttle is good and well-built. I don't have any jitter on any of the axes. Did not notice any phantom presses on the rotaries after firmware update and re-calibration today. The hats all work fine and have distinguishable actions, no issues here also. 1. The pot axes (the wheel and two dials) don't have tactile feedback, in the sense that you can't tell their position while in VR. Some physical notch or something would be great. You can't sense the bump until you rotate through/into it. 2. The center bumps on the pot axes are very pronounced and you need some deadzones on them, otherwise 1-3% rotation cannot be used in the game - the axes are physically returned to the center at these values. 3. The friction on the handles is not even - the left one has more friction than the right one (I don't have that tricky force-sensing screwdriver you are required to adjust the friction as per the manual, and has never needed one before). 4. The friction on the handles might be stronger: at it's initial setting it is even less than the fully loosened warthog throttle has. I can't adjust it properly without that force-sensing screwdriver (and I don't get where to get one, the ones I saw to electronically display the actual force cost like $1000 or I'm looking at something else). The bolt is not freely rotating clockwise anymore, from the factory (I did not apply any force to it though). 5. The led and its selector are useless to me. I can't setup the selector to emit a single press-release event via the configurator, so I can't bind it properly. By default it emits no button-presses. The closest I could get to is either all-time press (normal mode) or infinite loop of press-releases (encoder mode). I can't see the LEDs in VR either. 6. The front-facing hat under the index finger should've been rotated 90 degrees. That way it would've been easier to push it sideways. Currently my finger just slips of it and I have to reposition the finger to the side of the hat, push it down closer to the handle and only then move the hat to the side. Just rotating the pattern would give more sideways grip. 7. The throw of the throttle levers is less than that of WH throttle. Don't see a lot of issue with it yet, but I'm not doing any formation flying yet. As you can see these are minor issues (if at all). No showstoppers here. In general, I can justify the upgrade from WH throttle. The best thing is ergonomics: everything is where it should be and is easily reachable; layout is great for VR. Had a single accidental button press, in like 5 minutes after initial setup blindly looking for the left-most toggle.
-
Oh. So it's only if the scale is more than 100%? I thought they just broke it half a year ago or so and just never cared to fix (as VR is not a priority, obviously). By a coincidence I bought a 4k hidpi monitor approximately at the same time, but never thought it might matter.
-
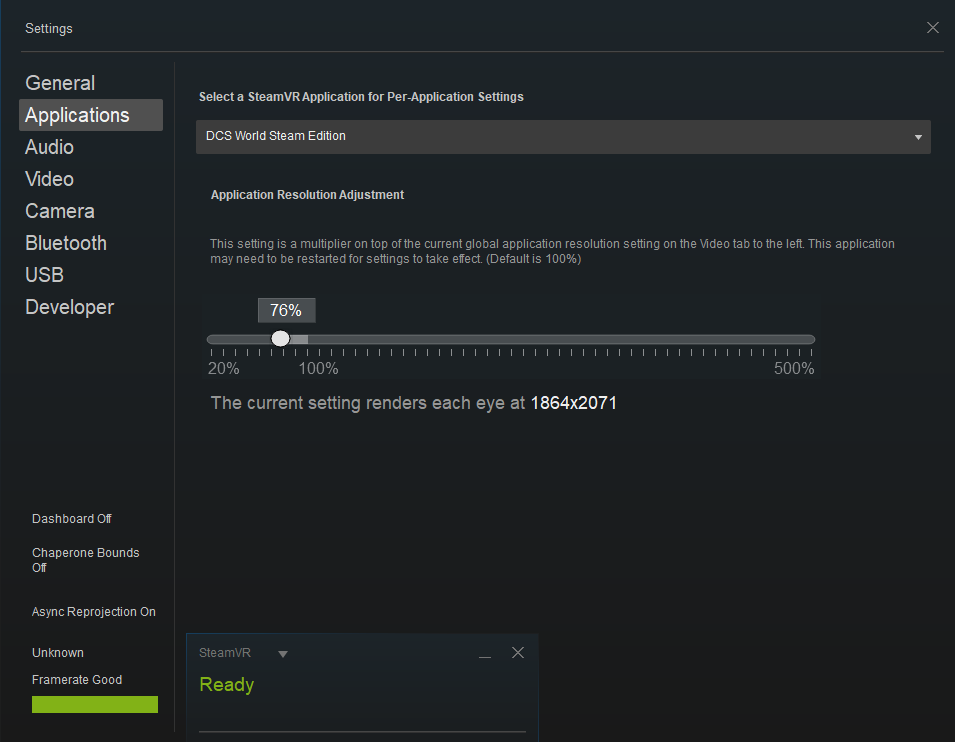
Поднял SS в Стим до дефолтных 100% в DCS (200% Video остались). Визуально стало немного лучше, по фпс особой разницы не заметил (в Нормандии 60-70 у воды/деревьев, 90 на 1000 футов и выше), GPU на 97% используется. Возможно вчера ночью я под конец забыл DCS перезапустить после изменений в Стиме. Скриншот с 76% в настройках Стима прошу считать ошибкой. Sent from my E5823 using Tapatalk
-
Я имел в виду наоборот. Скриншоты я сегодня делал. С фпс у меня всё впорядке. На Кавказе сегодня в аналогичной миссии из быстрого меню - стабильно 90фпс везде, при ~70% загрузки GPU. На Нормандии в небе почти всегда 90фпс с редкими просадами над городами, но что-то я ни одного бота не встретил... Максимум 80%GPU используется, карта даже частоты не поднимает. У меня такое ощущение, что отвалился суперсэмплинг стима или вчера ночью я уже ни черта не различал. Бред, так-то, про суперсэмплинг, но я проверю ещё. Вчера я точно всякую мелочёвку лучше различал. Ну и террейн кабину подсвечивает всё равно, на что я вчера внимания не обратил, т.к. только на впп стоял. Sent from my E5823 using Tapatalk
-
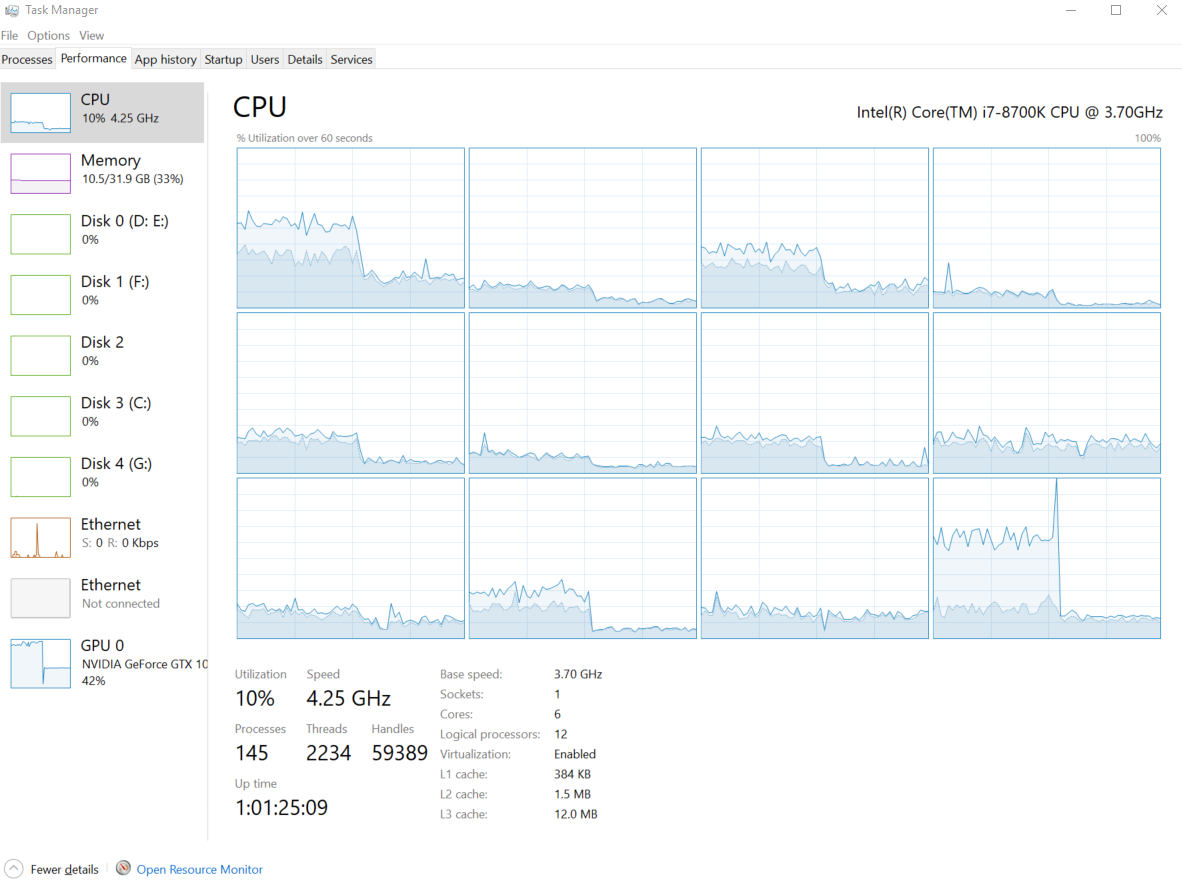
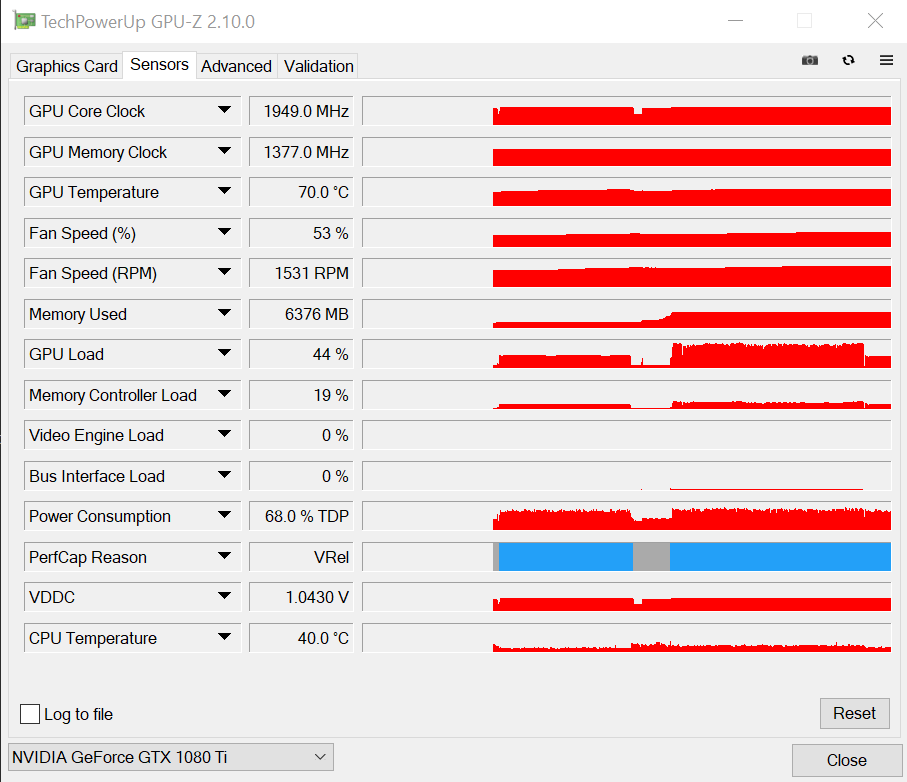
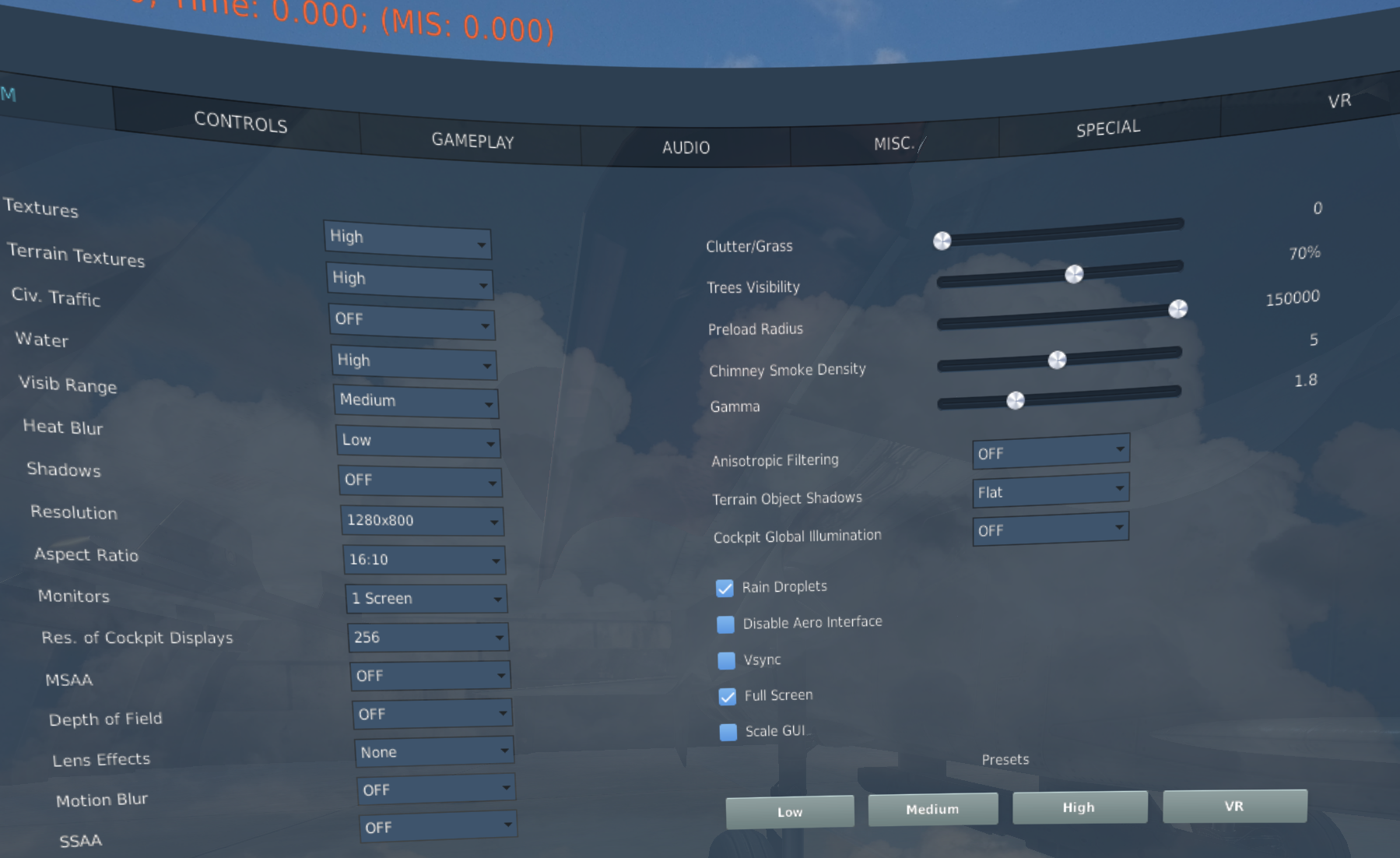
DCS обновился и сегодня циферки на GPU поменьше. До 90% вроде не дошло как и до максимального напряжения. Возможно удастся что-нибудь ещё накрутить, но пока чертовски лень. Простите за скриншоты, но так оказалось быстрее. На скринах GPU-Z статистика с момента старта DCS. Task Manager показывает кусок стояния на взлётке и после спада - меню. В стиме выключены опции Interleaved reprojection и (очевидно) Always-on reprojection, включена только асинхронная. Драйвер 24.21.13.9836 (NVIDIA 398.36) / Win10 64. Модов не установлено. Миссия - Instant Action, Spitfire, Takeoff, Normandy. Как это всё ведёт себя в полёте над Нормандией смотреть буду вот сейчас - вчера, после полуночных "игрищ" с настройками, сил полетать уже не осталось. Вообще заметил, что изменение пресета особой разницы в фпс не даёт - только нагрузка на видеокарту уменьшается. Т.е. зеркала съедают 5-10фпс, настройки "глобальное освещение кабины", "дальность видимости" (High) и тени съедают столько же каждая (проверялись по отдельности, но с включёнными зеркалами) - и это как будто бы всё, что влияет на фпс. Если всё перечисленное выключить, заметно лучше фпс не становится, а GPU начинает работать на 60-70%. В итоге выключил всё, без чего как будто можно летать на спите (зеркало мне нравится, лучше чем чёрная дыра). Задачу ставил такую: добиться максимального fps при максимальной загрузке железа (ибо а зачем оно ещё - электричество экономить?). Такие в целом и результаты. Неутешительные. В целом, хочется материться, потому что за ковырянием настроек я провёл больше времени, чем собственно в полётах, на которые и так времени мало. Но изначальные 45fps в качестве "нормального" для VR это...

-
Я вчера часа полтора убил, чтобы подобрать что-то большее 45 фпс на ВПП в Нормандии. Добился более-менее стабильных 60-70фпс на относительно красивых настройках с включёнными зеркалами в кадре (видео работает на 90-97%, процессор 60-70% на используемом ядре). SteamVR даёт большую точность настройки, как мне показалось. Крутить определённо стоит что-то одно. При этом если крутить в DCS, то в стиме стоит выставить родное разрешение (100% в обоих вкладках), потому что DCS будет его уже умножать и соответственно просаживать ФПС. Разница визуально очевидна только если сильно выкручивать, но и фпс тогда сильно просаживается.
-
Это суперсэмплинг (кажется так раньше назывался, три что ли реинкарнации претерпел). По умолчанию у всех разный (само разрешение рендера, а не процент) - зависит от железа. Аналог Pixel Density (или как оно по-русски, единственный слайдер на вкладке VR) в DCS. Настраивается двумя слайдерами - для всех глобально (вкладка Видео в SteamVR) и отдельно для приложений. Значения из обоих вкладок перемножаются. Т.е. для вайва у меня 200% во вкладке видео (дефолтное значения для моего компа) и 75% что ли в приложениях для DCS конкретно. Что даёт типа полуторакратное разрешение рендера от разрешения дисплеев шлема (с учетом поправок на искажения, физическое разрешение дисплеев меньше).
-
Well, some of them are (e.g. PhysX can run on CPU or GPU). The actual collisions and such. But you still need to sync them all back before rendering the world. Parallel computing doesn't imply that you get the end result faster, it's just that in some cases you can get more jobs done within a certain timeframe. Everything comes at a cost and has practical limitations. I don't know if DCS supports PhysX though. Sent from my SGP611 using Tapatalk
-
IIRC, most of physics calculations are single-threaded currently and are hard (if at all possible) to be done in parallel. That's the bottleneck - you have to get your physics before drawing the frame. So you want to maximize the single-threaded performance on your CPU to actually get data to draw on screen in time. But IMHO current market state gives not so many options and the clocks aren't getting any higher soon. P.S. I decided to not wait any longer and bought 8700k. Mainly because of MoBo with 2 PCIe M.2 slots. I couldn't get much boost other than from disks, as compared to my old i7-4770. At least the levels load faster now.
-
The 4 corner holes on MT50 throttle match tose of Warthog. So if you have a MT Wathog base those should match. I would expect that MT50 throttle needs some more separation from the mounts because of different lever poditioning. It might be that the inner holes match the base mount holes (I'd expect that actually) but cannot check yet - I am still waiting for the throttle to ship. I have preordered the new mounting plate as well, though. Sent from my E5823 using Tapatalk