

Super Grover
-
Posts
326 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by Super Grover
-

How to win at BFM in the Mighty F-4E Phantom
Super Grover replied to Victory205's topic in DCS: F-4E Phantom
Sadly, there's no simple answer to this. First of all, with all the information I have, I wouldn't call the linked picture a reliable source. Then, the question is what alpha are you interested in - is it wing or fuselage (different F-4 sources use different references for that)? Then there's that constant issue of the conversion between the AoA in units and degrees - and this is probably the most challenging question we had to answer to properly use the resources when working on the FM of the F-4E. Finally, there are very significant differences between wind tunnel data and flight tests, and the in-flight calibration of the production AoA measurements was probably one of the issues. Finally, the problem is the definition of the stall point and how the stall is approached, which significantly impacts how the aircraft behaves. It was easier to test and collect the point when the aircraft departed. Back for a moment to the attached plot - according to McDonnell, 1G departures for the base wing F-4E could happen as low as at 19° of wing AoA - so lower than what is presented in that graphics. And after this too long introduction , when I drew all the uncertainties and how one should take all those numbers with a grain of salt, I can write that the slatted wing stalls/departs around 3°+ later than the non-slatted wing. -
Thank you, everyone, for reporting the issue. It has been fixed internally, and the fix should be available in the next patch.
-
Yes, but I haven't yet finished the FFB review pass, as other items were prioritised. However, I'll probably return to this after the next update is published.
-
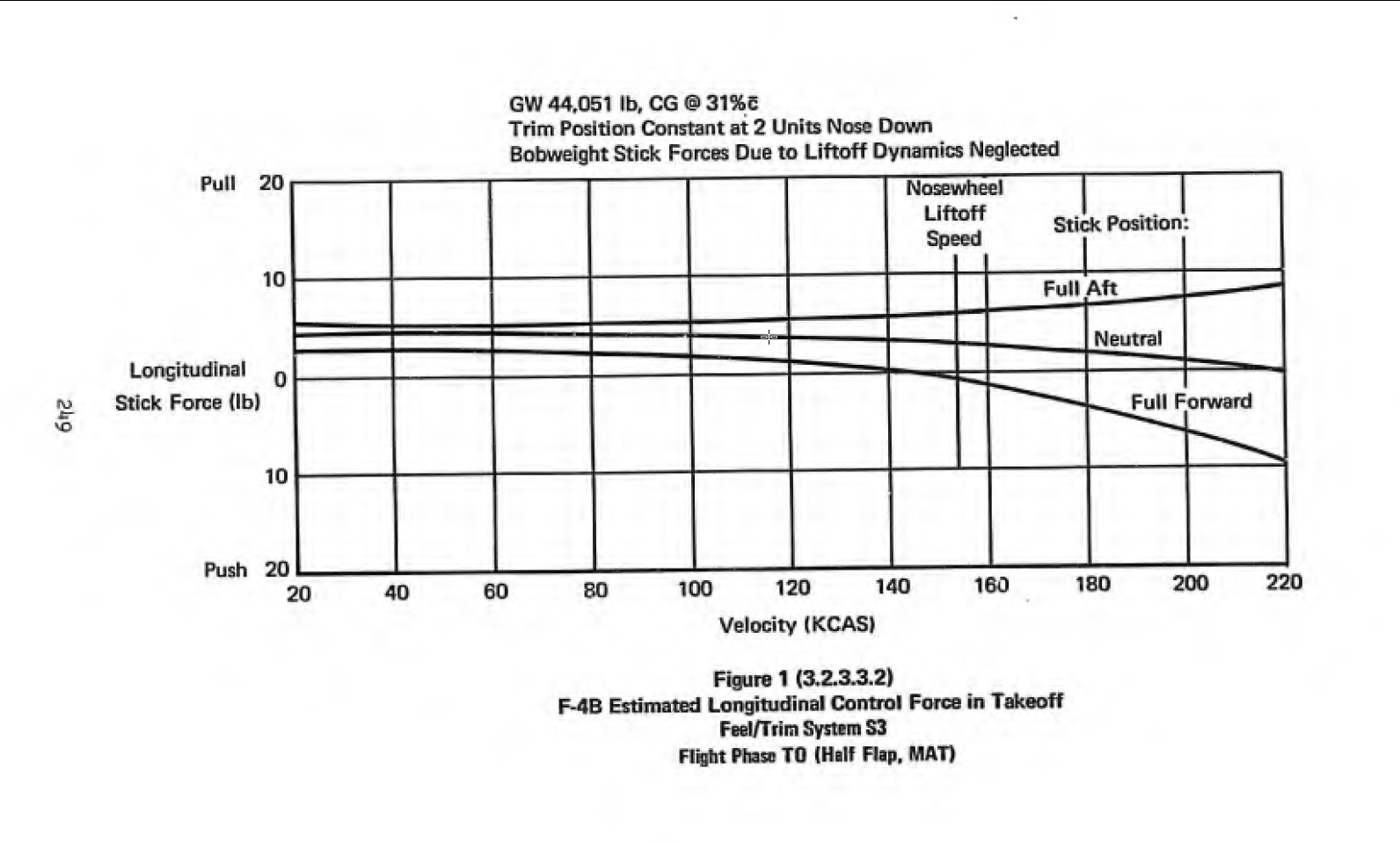
Quite possibly, yes. The bellows-bobweight stick forces would be just a bit higher than the friction forces and relatively small to other flight regimes. The figure below comes from a publicly available document: VALIDATION OF THE FLYING QUALITIES REQUIREMENTS OF MIL-F-008785A (USAF) null It's for the B version, but the changes between the systems were minimal and shouldn't impact the bellows behaviour at this speed. Higher speeds are not visible here, but you can extrapolate and roughly get the idea of how much they would increase at high speeds. Note that the takeoff pitch controls will change in the next update as we added a more detailed stabilator simulation close to the ground, significantly improving and simplifying handling and making it more realistic.

-
Strange pitch up with FFB enabled in general settings of DCS
Super Grover replied to jojojung's topic in Bugs & Problems
This option should appear in the next DCS update:
-
The topic is slightly more complex. The stick behaviour on the ground, including the animations, is in a special mode due to the system's physical properties, which otherwise would cause confusion and unrealistic visuals. Based on feedback from our testers, we introduced this mode before the release. The most crucial difference is the lack of friction forces (or no direct control over them from DCS for FFB sticks), while friction is the most prominent force on the ground. We simulate the non-friction for FFB sticks on the ground; it's just that they are very small compared with those in flight. On the ground, the difference in force between the most forward and the most aft stick position is less than 5 lbf. At 220 kts, it should be close to 18 lbf. For 350+ kts, that difference can easily reach 80-100 lbf. So we assume that 40-50 lbf in each direction corresponds to the max force from the FFB and scale all forces proportionally. It means that on the ground, the commanded force may be below the threshold for your FFB stick to react. You may want to set a nonlinear function for the force in your FFB driver, but we may also add a slider for fine-tuning of the FFB linearity as a quality of life feature in one of the future updates.
-
[NO BUG] FFB, running out of nose down pitch trim in level flight
Super Grover replied to Chipwich's topic in Bugs & Problems
But since you run the Moza, with the forward trim (2-3 units nose down), the stick should want to move forward and stay around 30-50% forward from the centre. If it wants to stay in the centre, it may be that the stick base doesn't receive the proper FFB signal or the FFB signal is ignored. -
The log file suggests a problem initialising Jester sound samples, which indicates that the whole directory with the samples was missing. I assume it works now, so we won't investigate it, but if the problem reappears, please let us know, and we will check what could cause it. For the time being, have fun with the F-4E
-
[NO BUG] FFB, running out of nose down pitch trim in level flight
Super Grover replied to Chipwich's topic in Bugs & Problems
What was your approximate neutral stick position (zero force) with that position of the trim? -
Hydraulic press. Seems high and Fluctuation on both systems
Super Grover replied to P3CFE's topic in Bugs & Problems
Thank you for the report. The relief valve cracking pressure should be closer to 3800 psi. I suspect some very uneven power consumption somewhere. Of course, this looks like a bug, and we will investigate and fix it in the next patch. We haven't taken a closer look yet, but we'll let everyone know when we have more information about the issue. -
Strange pitch up with FFB enabled in general settings of DCS
Super Grover replied to jojojung's topic in Bugs & Problems
I'll add a special option to ignore FFB devices connected. This should help with situations when, for any reason, a device reports as an FFB connected but isn't used for the stick controls. -
Based on your video, I think that you might be checking the wrong Force Feedback option. Please make sure that this one is unselected:
-
If you could drop a short track with your flight/take off, that would be a massive help.
-
vJoy may report the joystick (rudder) as a force feedback device. Please try disabling Force Feedback in DCS options.
-
I identified one - and hopefully the only - source of such desyncs. As a temporary workaround, please ensure that both clients (the pilot and the WSO) use the same settings for the special option "Use Radar Antenna Hand Control also for Radar Cursor Control Panel" - unchecked (default) for both; or checked for both. Also, please let me know if you keep getting the desyncs despite the same options for both clients.
-
2.9.5.55918 (MT) Flaps airspeed switch set incorrectly
Super Grover replied to Stickler's topic in Bugs & Problems
Is your observation based on a single flight or multiple attempts? Did you fly a worn-out aircraft or maybe a reference aircraft? As you noted, the value isn't precise so you might have gotten into an airfame which had those values lower. Poor quality and wear and tear also change the threshold values of the blow-up switches. I checked the code, and the mean values are 237 kt for accelerating and 222 kt for decelerating. So, at least, we can confirm that the code should work as in the manual. If it does not, we will make sure to find out why and fix it. -
Thank you for your message, @Ludl0w. Yes. Some aspects of the hydraulic systems simulation haven't been enabled yet as they are among the most complex systems and influence multiple other components. A potential bug could render the entire aircraft unflyable, so we decided to play it safe for the release. There are also other aspects of the hydraulic system modelling that need to be finished, and proper hydraulic leaks are in that group. They aren't on the shortlist for the next update, but it won't be long before those features are released.
-
I'm sorry you are disappointed with the module. However, that disappointment can't justify spreading misinformation. If you believe that we did anything incorrectly, please get in touch with our customer support with your order number to check what options are available for you.
-
I'm sorry, but this is borderline trollish.
-
I don't know. I was taught that false implies everything and anything. IMO, it's just a waste of everyone's time to conclude on incorrect assumptions.
-
I wrote in the other channel that the animation arguments are NOT directly related to the actual stick position and shouldn't be used for any aircraft behaviour comparison. The chart above was created after my post, but the animation arguments were still used to plot it. I can't forbid anyone from having an opinion about that plot, but the methodology of analysing the controls presented is incorrect. As promised, I'll prepare an in-depth explanation of what we do and how we do it, but the queue of more urgent tasks is long, so that it may take a bit longer.
-
The behaviour from your video is 100% correct and intended.
-
Thank you for your message. We've seen reports on this, but we're still unable to reproduce it on our end. In your case, some differences in the configuration of the server/client/network must be causing the errors, but we still have to identify them. Would you mind uploading both the pilot and WSO dcs.log, please? This could help us understand the problem.
-
This one doesn't trace to any of our libraries - it happened in the rendering routines. Although it may indirectly relate to the F-4E, we have no tools to analyse it. Also, it may be completely unrelated to the F-4E. We will pass it to ED for you.
-
http://f4.manuals.heatblur.se/cockpit/pilot/left_console/center_section.html?highlight=afcs#afcs-control-panel STAB AUG: YAW, ROLL, PITCH -> ENGAGE AFCS->OFF, ALT->OFF



.jpg.d4dc4f44bddfe552df10204a98c48694.jpg)