SloppyDog
-
Posts
258 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by SloppyDog
-
Cool. So what I am doing is not entirely wrong: I usually get Light on the Wheels about 40ish percent, then if I continue to apply collective in a slow manner, it will rollover. Then what I'm doing now is press on with the collective at about 70%, it will come off of the ground and will be stable. The thing I've noticed since last patch is that now it takes 10% more torque to lift off that I was used to, now it is about 70%, before it was a cool 60%.
-

Turbosupercharger Use: 7000ft? 12000 ft? 3500 ft?
SloppyDog replied to Istari6's topic in DCS: P-47 Thunderbolt
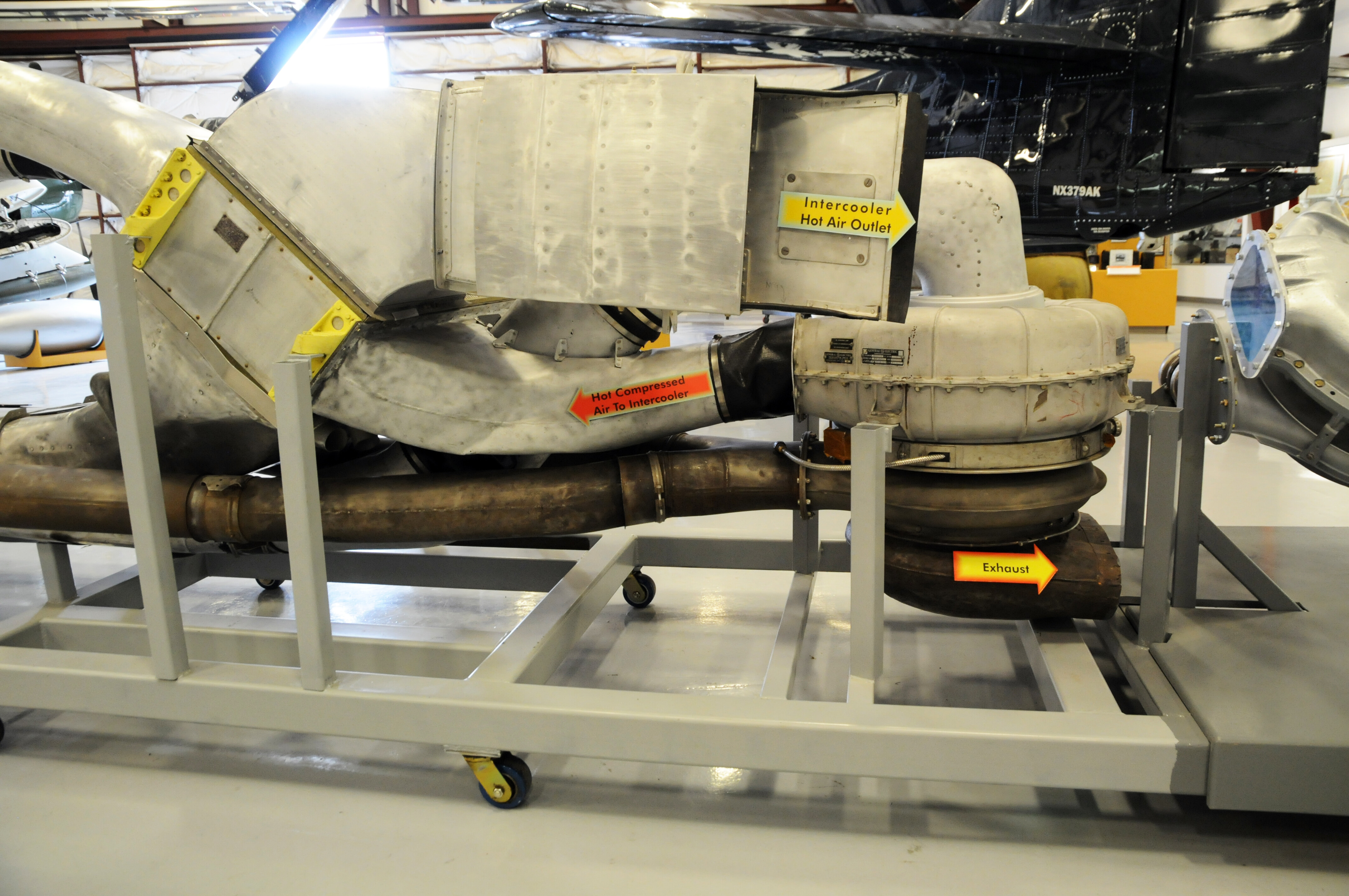
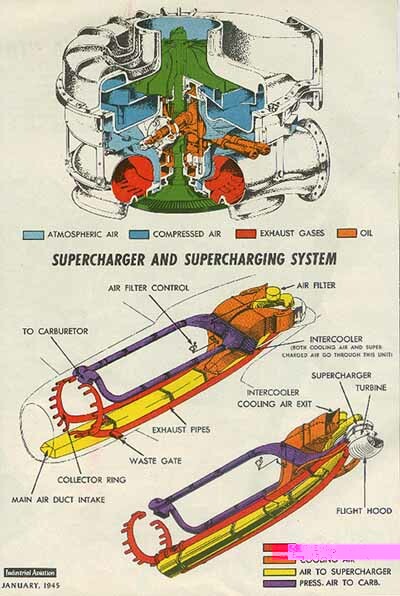
Have you ever seen these? These are from the National Museum of WW II Aviation in Colorado Springs, CO. This site gives a good explanation how the system works. https://lynceans.org/all-posts/the-complexity-of-a-ww-ii-p-47-thunderbolts-powerplant/ Basically, the entire body of the P-47 is a housing to the supercharger and intercooler system. People talk about pressures, but volume of air is also very important. Just look at the size of those pipes. It is a lot of air moving around.
-
Turbosupercharger Use: 7000ft? 12000 ft? 3500 ft?
SloppyDog replied to Istari6's topic in DCS: P-47 Thunderbolt
That's the right way to do it, boost always equal or less than throttle. Our old friend Greg explains that in fine detail here: -
What joystick do you have? I'm curious. The only ones available, that I know of, are the VKB one and those old Microsoft Sidewinders.
-
DIY doorgun controller demonstration on dcs huey uh1h working
SloppyDog replied to hannibal's topic in DCS: UH-1H
Cool. Well done, sir. And yes, we do need a lot of new features for door gunner in DCS. One I've been clamoring for is a better swivel of the guns. To the sides and down. In DCS the guns have very restrict movement. Like the picture with the .50 BMG you showed, it almost points totally forward, something not possible in DCS. And a .50 as a gun addition wouldn't hurt as well. -
You change the Y saturation.
-
I have this mission in Nevada, where you attack an SA-10 site on the runway of Area 51. The whole scenario is that the SA-10 is disrupting aerial operations in the area. so the Apache has to fly very low, on the western part of the desert, get to a waypoint on the west part of the Papoose Mountain Range and contact a JTAC located atop of the range who then passes the targets to the Apache. I made this mission to test/demonstrate the LOAL/HIGH Trajectory capabilities of Laser Hellfires. As everyone in here< I was hoping to do the same with the Radar Hellfires. The JTAC atop the mountain lases the target beautifully during the day, during the night it doesn't but it is an age old problem with DCS' JTACs that they can't see/mark nothing at night. So, for night mission I use Ciribob's Jtac CTLD script, but I digress. It is a thing of beauty seeing the Kilo Hellfires being launched, going over the mountain, detecting the laser spot and engaging the targets. I thought the same could be done with the Kilo missiles. But in the Weapons page there is no options for HIGH/LOAL trajectory, and even if the ACQ source is a target coordinate, the TADS will ask for the Weapon Data. So, I believe @NeedzWD40 answer is right: there maybe some limitation with the technology, but it is more of a question of someone having eyes on target before engaging. With Laser Hellfires you always need someone to lase it, even if I don't see it, flying blind from the other side of the Papoose Range. But the JTAC has eyes on, so he will guide the weapon in. He or other asset, like a Predator or a TPOD in a jet. So, regarding the Kilo missile, it may be possible that in the future we will be able to fire it blindly through Data Link, because someone else will have its sensors, be it TADS or FCR, on the target. In the end, in my opinion, it all comes down to Rules of Engagement.
-
I believe the problem that you are having is related to the collective, not so much to the pitch and roll axes. It seems to me that your controls are inputting too much collective, too fast, thus creating the 'wild horse' scenario you get yourself into. The Apache needs a very light touch on the collective, you start (obvioulsy) at 0% torque and slowly, very slowly, bring it up to 60%. I do it in steps, because the torque spikes up and down, so I let it go to 30%, then settles down, then 40%, settles down, then 50... until you get at 60%. At around 60% for most situations of height, temperature and loadout, the Apache will get light on wheels. Then you correct with pedals and cyclic, until you start to hover. Mine collective was crazy too, so I changed it to straight line and I go very slowly during takeoffs, landings and hovers. Only time I "Tom Cruise" it, is when flying at speed and feel the helicopter falling, but that's rare. It is usually very light, very slow commands. Regarding the pacth I felt it easier to hover, George more responsive and easier to cruise around. However, I'm having this strange pitch attitude, nose down attitude when after taking off, nosing down to pick up speed. It does a more pronounced nose down attitude, very much so that I had to change pitch saturation to 60% in my control. Anyone else having a similar problem?
-
New sounds and it seems that ammo effectiveness went up.
-
Issue with AI being almost invincible at times
SloppyDog replied to Dograw75's topic in DCS: P-47 Thunderbolt
Yep, it has happened to me as well. Peppered the enemy airplane, and it landed and the pilot was alive. Well, that was before the new ammo that ED updated. Look in the ME what kind of ammo you are carrying. Check if it is Training or only AP. The most modern and effective ones are the '43 and '44 ammo belts, with HE-I-AP or API-HE combinations. These are game changer, and the enemy will explode in flames almost all the time you hit them. ED has had changed it some time ago, and for me at least, it is more in line with what we see in docs and read in books, when WWII pilots say that one trigger squeeze at a fairly close distance and the enemy planes would simply blowup, or catch fire very easily. -
P47-D pre prepared cockpit settings
SloppyDog replied to Michael Taylor's topic in Missions and Campaigns
You could, at least there is an option in the ME for that. You can make a mission, then click on Prepare Mission. It opens the mission, you can change the cockpit settings, then get out. It would/should save your cockpit state. However, this is an ancient option in the ME, and I don't believe it works as intended anymore. But you can test it, and see if the cockpit switches are persistent in the manner you left them next time you open the mission. Another way to do it, is to use triggers at mission start, and change cockpit settings using "X:Set Cockpit Argument number XXX" . It is more labor intensive, since you'll need to find which switch does what and what is the correct argument for the position you want, there are ways to find it, and some people have tables with all the arguments listed. It should work, but with ED's ME, sometimes it is hit and miss, and don't work as intended. If you described what you want, I and others may help you, by trying it out in the ME. -
I know, I know, it is a modern helicopter with a modern mount, but couldn't we get something more or less like this?:
-
You don't need to make your own, you could use the same mission. All you have to do is open the mission in the ME, and do all the edits you wanna make, namely the frequency change so you wouldn't be listening to your wingman all the time. I would suggest to change the name of the mission in order to keep the original intact. But I don't wanna to dicourage you to try your hand in the ME. All of us go there eventually, it is a rich new world, with lots of things to learn, lots of frustrations, but lots of joy. It is amazing seeing a mission you just made working perfectly as intended.
-
One easy way to make the text and audio dissapear is to change frequencies, to some that the AI is not transmitting into. You won't be receiveing, thus no audio is heard and no text box appears. Also you can change the options in the AI flights for "Not Report Waypoint" or something like that in the Mission Editor, so they won't transmit what they are doing. If radio transmissions are absolutely necessary for you to complete your mission, you could take out the seconds they send you a message in the video edit. Besides this, I cannot help you out with more elaborated solutions.
-
My wish list right now for the Huey is to have a better swivel for door guns, to be able to shoot almost straight down or almost fully to the sides. At least that what it seems in the docs videos I've watched.