Goblin
-
Posts
1210 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by Goblin
-
Then let the devs finish it... There is bound to be bugs and unfinished features in unfinished software. Give them time. :)
-

Why is artificial horizon so badly wrong at times?
Goblin replied to imacken's topic in DCS: Spitfire L.F. Mk. IX
I haven't checked if it's modelled in the DCS Spit, but I would guess the Spitfire had a vacuum driven gyro horizon. These only work after the engine is started and the vacuum pump is running. This also means that the gyro will start spinning in the direction the gimbal happens to have at the time of startup, so the gyro needs to be erected manually. Like I've sai, I don't know if this is the case with the Spitfire 9 or if it's modelled, but the behaviour of the horizon described in this thread may very well be correct. -
The DCS: AJS37 Viggen is still in 'Early Access' meaning it's not finished yet.
-
Yes, that's true. The Viggen is. :) It can be a way to relax the stability, yes. But you can also have a relaxed or even unstable configuration with a conventional aft horizontal stabilizer.
-
What other design could do what the Viggen did in the 60ies and 70ies that could've been bought by Sweden? Sweden learned that it must have a domestic fighter production if it would be able to defend itself, being a independent state, when the US confiscated fighters destined for Sweden during WWII. Swedish weapon export laws are funny... We are not allowed to export weapons to countries that may use them in a war. I kid you not! That kind of limited the number of prospective buyers :)
-
That's correct. The Viggen canards work in a manner like big vortex generators that supply high energy air to the main wing, in high AoA flight. LERX work in a similar manner. LERX are essentially low aspect wings, meaning their wingspan is short in relation to the chord. Think stubby wings. A glider has high aspect wings, as a comparison. Low aspect wings does not produce that much lift but has the advantage of having a high maximum AoA, meaning they will stall at a higher AoA. This means the LERX will continue to supply high energy vortices for the main wing that will help it delay the flow separation associated with a stall. In a nutshell, anyway ;)
-
Excellent sim. Only one drawback. It doesn't support VR. A shame, really, as I can think of no better sim to showcase all that is so great about todays VR HMDs, with their relatively low resolution.
-
Ok? I read that Braeden had problems getting the encoders to work, hence my comment about using shift registers. The 6 encoder limit is a MMJoy2 limitation. Maybe mega_mozg can change it.
-
Here's the MMJoy2 setup.

-
This means that both the canards and the main wing produce lift. A conventional tail design, the horizontal stabilizer needs to produce a downforce, to counteract the pitch up moment of the main wing. This downforce acts in the same direction as weight and needs to be counteracted by increasing lift. Increasing lift means increasing induced drag. A canard can be a more efficient design, compared to conventional tail designs.
-
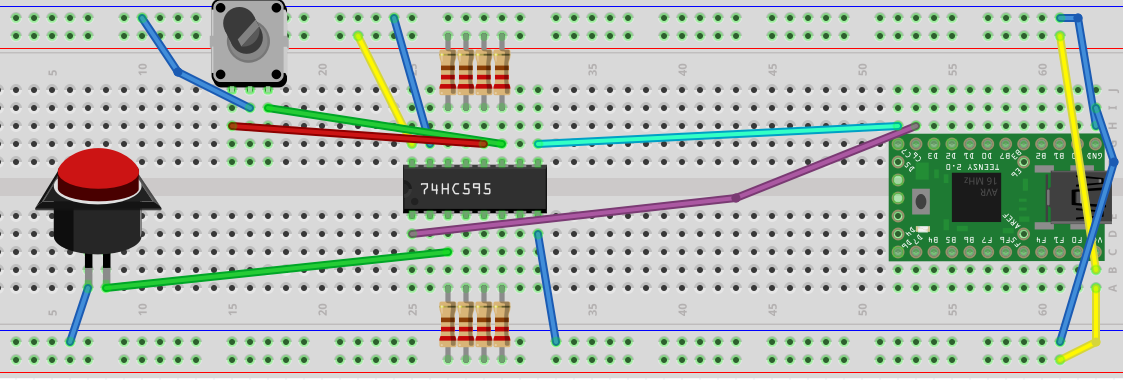
Brewnix, I used an older MMJoy2 version for my last build. For this one I have the latest. Will provide a screenshot of the setup. In the meantime, here's the breadboard view. Note. I have another shift register, the 74HC165, but I couldn't find it in Fritzing. :)
-
I have built a MMJoy2 controller with both buttons and encoders in a matrix. I scratched my head and had to get a lot of help from Sokol1 before I understood how to do it. Now I'm making another controller by using shift registers... So easy! Connecting encoders is just like connecting any switch or button. No more consideration as to what column or which row in the matrix, and where the diode go. Highly recommended!
-
Ah! I see. Yes, they could probably put a turbine texture on there. But as addde says, when running it would be a spinning blur anyway.
-
Hey! My pic! ;) What is it you find is missing? That screenshot is rather dark. The nozzle will of course change its appearance depending on the throttle setting and the top reverser plate will only hang down a while after engine shut downs, and the hydraulic pressure bleeds off.
-
Suncom SFS and Talon restoration and mods
Goblin replied to debolestis's topic in PC Hardware and Related Software
I ordered the TLE sensors from AliEx. So far I have tested 3 out of 6, and they work great! All came with magnets, but so far I have only used the old magnets already in the VKB pincer gimbal.
-
Same power setting, same endurance. That's correct! We agree! :)
-
Yes, because max endurance speed is found at the speed for minimum power required, and that's not the same as the speed for mimimum drag. But I'm saying that if you increase drag, the total drag curve will move upwards in that graph, and so will power required. But hey, believe what you want. :)
-
I'm not debating the fact that endurance and range is different entities :) I was just addressing your statment that trimming had nothing to do with endurance. Un-trimmed means more drag which means required power increases. Required power is, after all, drag multiplied by speed.
-
I don't. Anything causing drag wil increase minimum power required. At any given speed, the power required will be higher, if drag is increased. Simply put, less drag means less fuel used.
-
Sure it does. Aft loading a conventional design like the Spit, where the pitching moment of the wing is counteracted by the tail, means less trim drag. Less drag means less power which again means less fuel consumption and better endurance. So if trimming means that trim drag is reduced (trimmed condition has less drag than untrimmed), it does have an impact on endurance. Range will also increase, for the same reasons plus higher speed in trimmed condition.
-
Stop moving when you reach the canopy! ;) Seriously though, imposing limits for virtual movements can mess with your equilibrium and cause motion sickness. I don't feel I need this.
-
Stick, throttle, pedals 'weight' discussion
Goblin replied to hughlb's topic in PC Hardware and Related Software
Control forces vary with aircraft type, and those with direct connection to the control surfaces are subject to aerodynamic loads. Some are servo assisted, others have artificial feedback, etc. I fly the DCH8 myself, and have an acro rating on light aircraft. I agree that flightsim controllers generally are too light. I got the Slaw Viper pedals with a damper, and the BRD-N joystick that are quite heavy, compared to other controllers. I prefer controllers that feel like they have mass, if you know what I mean. They don't have to be that heavy, but I need to be able to rest my feet on the pedals, without moving them, and the stick must provide enough resistance that I get a feel for where I have my hand, in relation to center. I think this is because I'm used to real aircraft. Simulating control forces with springs and dampers is tricky. Many controller designs use cams which act as a variable moment arm for the spring resistance, making the forces around center lighter, and heavier further from center. It's hard to give a number for what will be considered enough control force. It's more of a question about what you are used to, or comfortable with... The VKB GF will have dampers, AFAIK, and that will probably improve on the feel of the stick. -
Thanks guys! Bohemond, I completely forgot about that VKB profile. Sorry man! I will send it when I get home.
-
How to setup trackir camera behind me?
Goblin replied to joebloggs's topic in PC Hardware and Related Software
You will need to invert the translation forwards/backwards, at least, as moving forward means moving away from the sensor... -
Thanks! The mount is temporary. Waiting for parts ;)

.png.2908604a51da39b21a2e382e0c881cb1.png)